TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025016611
公報種別
公開特許公報(A)
公開日
2025-02-04
出願番号
2024189774,2023513385
出願日
2024-10-29,2021-08-25
発明の名称
ロボット制御可能な電磁場発生器
出願人
オーリス ヘルス インコーポレイテッド
代理人
個人
主分類
A61B
34/20 20160101AFI20250128BHJP(医学または獣医学;衛生学)
要約
【課題】ロボット制御可能な電磁場発生器を有するシステム及びその用途に関する。
【解決手段】ロボット制御可能な電磁場発生器の1つの用途は、ロボットアームを使用して、ロボットアームに結合された電磁場発生器を移動させ、電磁場発生器の設定及び器具の追跡を容易にする。かかるロボット制御可能な電磁場発生器の別の用途は、ロボットアームを使用して、それに結合された電磁場発生器を移動させ、挿入可能器具と電磁場発生器の体積内で検出されるターゲットとの整合を容易にする。かかるロボット制御可能な電磁場発生器の別の用途は、ロボットアームを使用して、それに結合された電磁場発生器を移動させ、医療システム内で発生する歪みを検出する。かかるロボット制御可能な電磁場発生器の別の用途は、ロボットアームを使用して、マルチモーダルセンサ融合を容易にする。
【選択図】図29
特許請求の範囲
【請求項1】
ロボット医療システムであって、
電磁場(EM場)を発生するように構成された電磁場発生器に連結された第1のロボットアームと、
EMセンサと、
1つ又は2つ以上のプロセッサであって、
前記EMセンサが1つの位置にとどまっている間に、前記第1のロボットアームにコマンドを送信して、ロボット軌道に沿って前記電磁場発生器を移動させ、
前記電磁場発生器が前記ロボット軌道に沿って移動した期間に対応する前記電磁場内の前記EMセンサのEMセンサ軌道を検知し、
前記ロボット軌道と前記EMセンサ軌道を分析して前記ロボット軌道と前記EMセンサ軌道の差異を決定し、
前記ロボット軌道と前記EMセンサ軌道の差異が閾値よりも大きいことに少なくとも部分的に基づいて、前記位置におけるEM歪みの存在を決定する、
ように構成された1つ又は2つ以上のプロセッサと、を備えるシステム。
続きを表示(約 1,500 文字)
【請求項2】
前記1つ又は2つ以上のプロセッサは、前記第1のロボットアームに対応する運動データに基づいて前記ロボット軌道を決定するように構成されている、請求項1に記載のシステム。
【請求項3】
前記1つ又は2つ以上のプロセッサは、前記第1のロボットアームの動作に関連付けられたエラー要因または前記EMセンサのノイズに関連付けられたエラー要因の少なくとも1つに基づいて前記閾値を決定するように構成されている、請求項1に記載のシステム。
【請求項4】
前記1つ又は2つ以上のプロセッサは、前記ロボット軌道と前記EMセンサ軌道の形状の比較に基づいて、前記ロボット軌道と前記EMセンサ軌道の差異を決定するように構成されている、請求項1に記載のシステム。
【請求項5】
前記1つ又は2つ以上のプロセッサは、前記ロボット軌道に沿った複数の点と、対応する前記EMセンサ軌道に沿った複数の点との比較に基づいて、前記ロボット軌道と前記EMセンサ軌道との差異を決定するように構成されている、請求項1に記載のシステム。
【請求項6】
前記複数の点のそれぞれは、前記電磁場発生器の移動に関連する時間に関して決定される、請求項5に記載のシステム。
【請求項7】
前記1つ又は2つ以上のプロセッサがさらに、前記位置における前記EM歪みの存在を検出すると、前記位置における前記EM歪みを低減するために、前記第1のロボットアームで前記電磁場発生器を再配置するように構成されている、請求項1に記載のシステム。
【請求項8】
前記1つ又は2つ以上のプロセッサが、
前記EMセンサが前記位置にとどまっている間に、前記第1のロボットアームに追加のコマンドを送信して、前記電磁場発生器を第2のロボット軌道に沿って移動させ、
前記電磁場発生器が前記第2のロボット軌道に沿って移動した期間に対応する前記電磁場内の前記EMセンサの第2のEMセンサ軌道を検知し、
前記第2のロボット軌道と前記第2のEMセンサ軌道を分析して前記第2のロボット軌道と前記第2のEMセンサ軌道の差異を決定し、
前記第2のロボット軌道と前記第2のEMセンサ軌道の差異と、前記ロボット軌道と前記EMセンサ軌道の差異とを比較する、
ように構成されることにより、前記位置における前記EM歪みを低減するために、前記第1のロボットアームで前記電磁場発生器を再配置するように構成されている、請求項7に記載のシステム。
【請求項9】
前記1つ又は2つ以上のプロセッサは、前記第2のロボット軌道と前記第2のEMセンサ軌道との差が、前記ロボット軌道と前記EMセンサ軌道との差よりも小さい場合に、前記電磁場発生器を前記第2のロボット軌道に沿った地点に配置するように構成されている、請求項8に記載のシステム。
【請求項10】
ロボット医療システムであって、
電磁場(EM場)を発生するように構成された電磁場発生器に結合された第1のロボットアームであって、前記電磁場発生器を移動するように構成された第1のロボットアームと、
EMセンサを備える医療器具と、
1つまたは2つ以上のプロセッサであって、
前記EMセンサが前記電磁場内の所定の領域の境界に位置していることを決定し、
前記EMセンサが前記所定の領域の境界に位置していることを決定することに応答して前記第1のロボットアームの移動を指令することにより、前記電磁場発生器の位置を調整する、1つまたは2つ以上のプロセッサと、
を備える、システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書に開示されるシステム及び方法は、ロボット医療システムのための電磁場発生器を対象とし、より具体的には、医療システム並びに関連デバイス、システム、及び方法における歪みを検出するためのロボットによって位置決め可能及び/又は制御可能な電磁場発生器を対象とする。
続きを表示(約 8,500 文字)
【背景技術】
【0002】
腹腔鏡検査又は内視鏡検査などの医療処置は、患者の内部領域にアクセスし、それを可視化することを伴い得る。腹腔鏡処置では、腹腔鏡アクセスポートを通して医療器具を内部領域に挿入することができる。内視鏡処置では、薄い可撓性の管状医療器具を、患者の自然開口部を通して内部領域の中に挿入することができる。医療器具は、処置中に機能を実行するように構成されたエンドエフェクタを含むことができる。
【0003】
特定の処置では、ロボット対応の医療システムを使用して、医療器具及びエンドエフェクタの挿入及び/又は操作を制御することができる。ロボット対応の医療システムは、処置中の器具の位置決めを制御するために使用されるマニピュレータアセンブリを有するロボットアーム又はその他の器具位置決めデバイスを含むことができる。
【0004】
ロボット対応の医療システムは、医療器具の位置を、医療器具上に位置決めされ得る1つ又は2つ以上の位置センサの出力に基づいて決定するように構成され得る。
【発明の概要】
【課題を解決するための手段】
【0005】
ロボット医療システムは、システムのロボットアームに結合する(又は別様で統合される)ように構成された電磁(electromagnetic、EM)場発生器を含み得る。かかるEM場発生器は、ロボットアームを使用して制御又は再位置決めすることができるため、ロボット制御可能又は位置決め可能と見なすことができる。EM場発生器は、1つ又は2つ以上のEMセンサの位置を決定し得る磁場を生成することができる。EM場発生器はロボットアームに結合されるので、ロボットアームの運動学を使用して、EM場発生器のEM座標フレームとシステムのロボット座標フレーム又はグローバル座標フレームとの間の位置合わせを確立することができる。
【0006】
この構成は、EM座標フレームとロボット又はグローバル座標フレームとの間の関係を確立するためにユーザ入力を必要とし得る、より複雑な位置合わせステップの必要性を低減又は排除することができる。この構成はまた、例えば、ロボットアームに対応する電磁場発生器の設定を改善すること、医療器具を追跡すること、システムのセンサに影響を及ぼし得る歪みを検出することによって、EMセンサの位置が決定される精度を改善し、追加のモダリティとのセンサ融合を容易にすることができる。
【0007】
ロボット制御可能又は位置決め可能なEM場発生器のこれら及び他の特徴及び利点は、以下でより詳細に説明される。本開示のシステム、方法及びデバイスはそれぞれ、複数の革新的側面を有し、そのうちのいかなるものも、本明細書に開示される望ましい属性に単独で関与しない。
【図面の簡単な説明】
【0008】
開示される態様は、以下、開示された態様を例示し、かつ限定しないように提供される添付の図面と併せて説明され、同様の称号は同様の要素を示す。
例示的な実施形態による、診断及び/又は治療気管支鏡検査法のために配置されたカートベースのロボットシステムの一実施形態を示す図である。
例示的な実施形態による、図1のロボットシステムの更なる態様を示す図である。
例示的な実施形態による、尿管鏡検査のために配置された図1のロボットシステムの一実施形態を示す図である。
例示的な実施形態による、血管処置のために配置された図1のロボットシステムの一実施形態を示す図である。
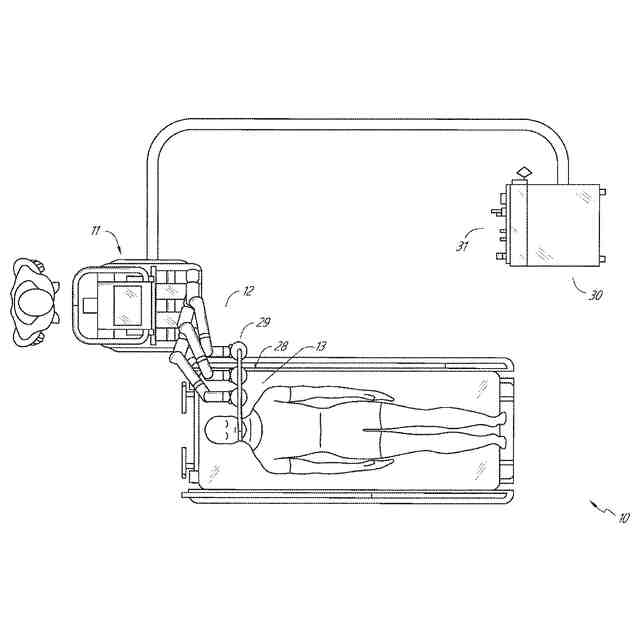
例示的な実施形態による、気管支鏡処置のために配置されたテーブルベースのロボットシステムの一実施形態を示す図である。
例示的な実施形態による、図5のロボットシステムの代替図である。
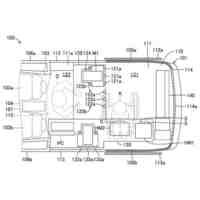
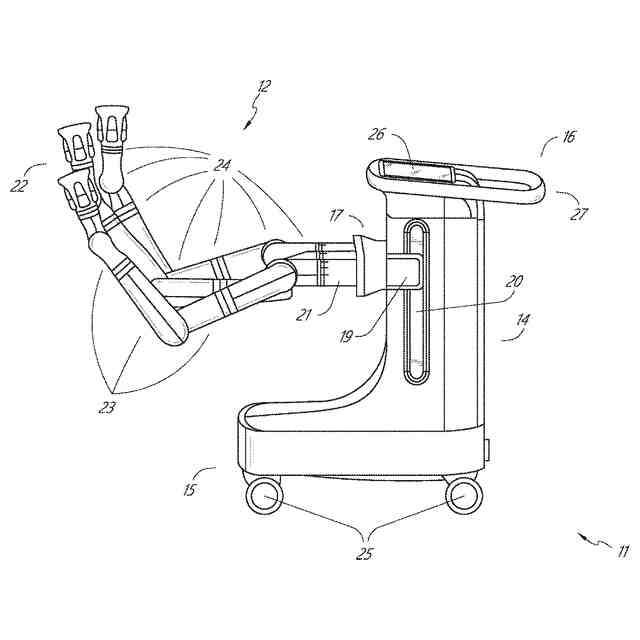
例示的な実施形態による、例示的な一実施形態による、ロボットアームを収容するように構成された例示的なシステムを示す図である。
例示的な実施形態による、尿管鏡処置のために構成されたテーブルベースのロボットシステムの一実施形態を示す図である。
例示的な実施形態による、腹腔鏡処置のために構成されたテーブルベースのロボットシステムの一実施形態を示す図である。
例示的な実施形態による、ピッチ又は傾斜調整を有する、図5~図9のテーブルベースのロボットシステムの一実施形態を示す図である。
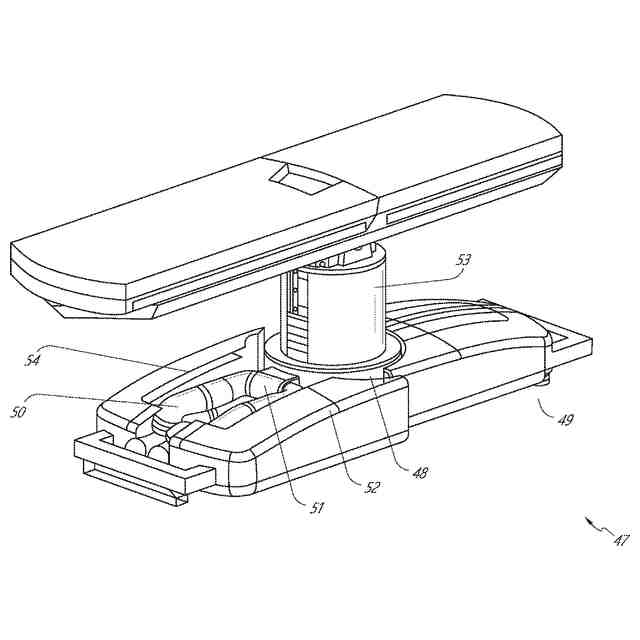
例示的な実施形態による、図5~図10のテーブルベースのロボットシステムのテーブルとカラムとの間のインターフェースの詳細図である。
例示的な実施形態による、テーブルベースのロボットシステムの代替的な一実施形態を示す図である。
例示的な実施形態による、図12のテーブルベースのロボットシステムの端面図である。
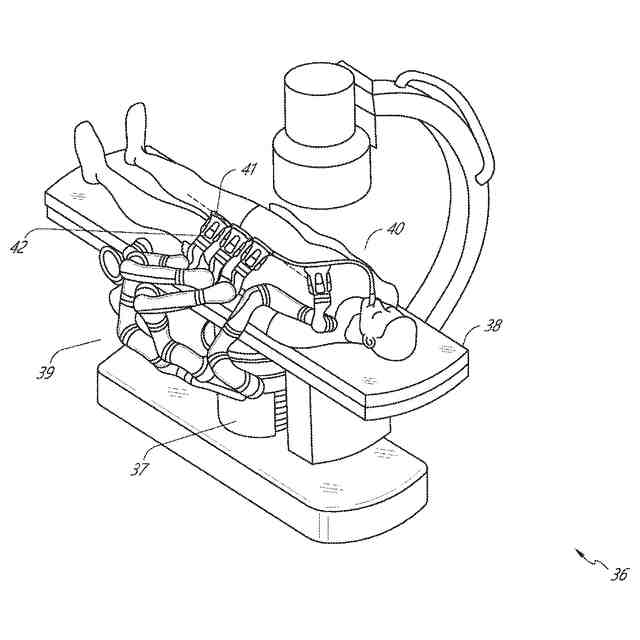
例示的な実施形態による、ロボットアームが取り付けられたテーブルベースのロボットシステムの端面図である。
例示的な実施形態による例示的な器具ドライバを示す図である。
例示的な実施形態による、対になった器具ドライバを有する例示的な医療器具を示す図である。
例示的な実施形態による、駆動ユニットの軸が器具の細長いシャフトの軸と平行である、器具ドライバ及び器具のための代替設計を示す図である。
例示的な実施形態による、器具ベースの挿入アーキテクチャを有する器具を示す図である。
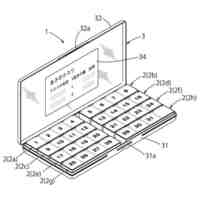
例示的な実施形態による例示的なコントローラを示す図である。
例示的な実施形態による、図16~図18の器具の場所など、図1~図10のロボットシステムの1つ又は2つ以上の要素の場所を推定する位置特定システムを示すブロック図である。
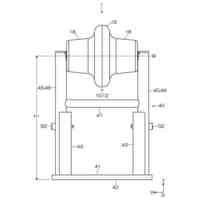
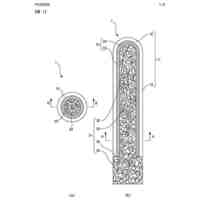
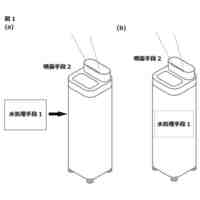
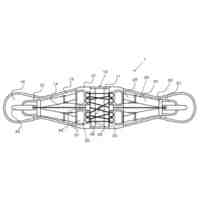
作業体積を有する磁場を生成する、例示的なEM場発生器を示す図である。例示的な実施形態による、EM場発生器の作業体積内に位置決めされた例示的なEMセンサも示されている。
例示的な実施形態による、図21のEM場発生器を含むロボット医療システムの一実施形態を示す斜視図である。
例示的な実施形態による、図22Aのロボット医療システムと関連付けられたロボット座標フレームをEM場発生器と関連付けられたEM座標系と位置合わせするために使用され得る、例示的な位置合わせステップを示す図である。
例示的な実施形態による、図22Aのロボット医療システムと関連付けられたロボット座標フレームをEM場発生器と関連付けられたEM座標系と位置合わせするために使用され得る、例示的な位置合わせステップを示す図である。
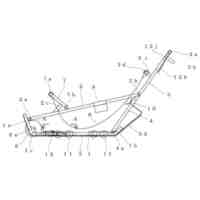
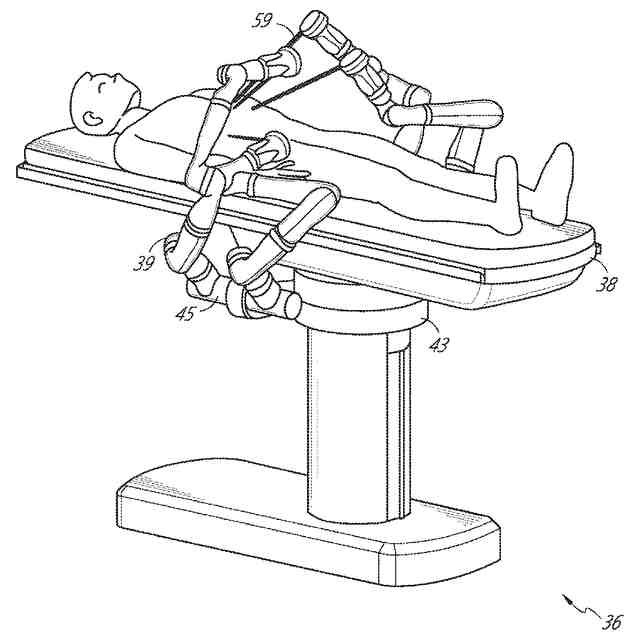
例示的な実施形態による、システムのロボットアームに結合されたロボット制御可能な電磁場発生器の一実施形態を含むロボット医療システムの一実施形態を示す斜視図である。
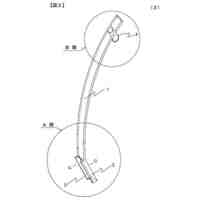
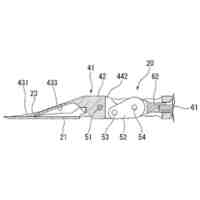
例示的な実施形態による、ロボットアームに結合するように構成されたロボット制御可能な電磁場発生器の一実施形態の斜視図である。
例示的な実施形態による、図24のロボット制御可能な電磁場発生器が、ロボットアームの器具駆動機構に結合するように構成され得ることを示す図である。
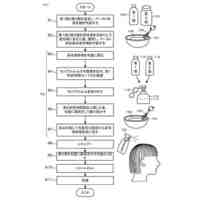
例示的な実施形態による、ロボットアームに結合するように構成されたロボット制御可能な電磁場発生器を使用してロボット医療処置を実施するための方法の一実施形態を示すフローチャートである。
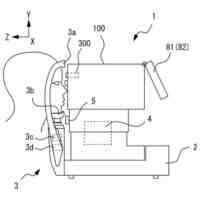
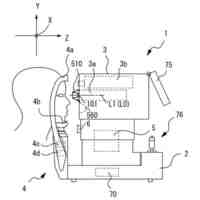
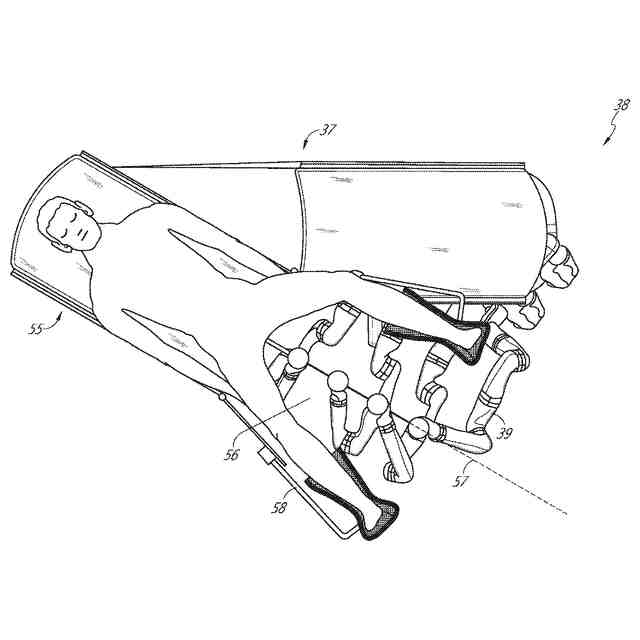
例示的な実施形態による、解剖学的特徴の自動器具追跡及びマッピングのために構成されたロボット制御可能な電磁場発生器を含むロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、解剖学的特徴の自動器具追跡及びマッピングのために構成されたロボット制御可能な電磁場発生器を含むロボット医療システムの一実施形態を示す図である。
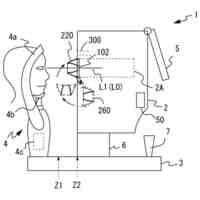
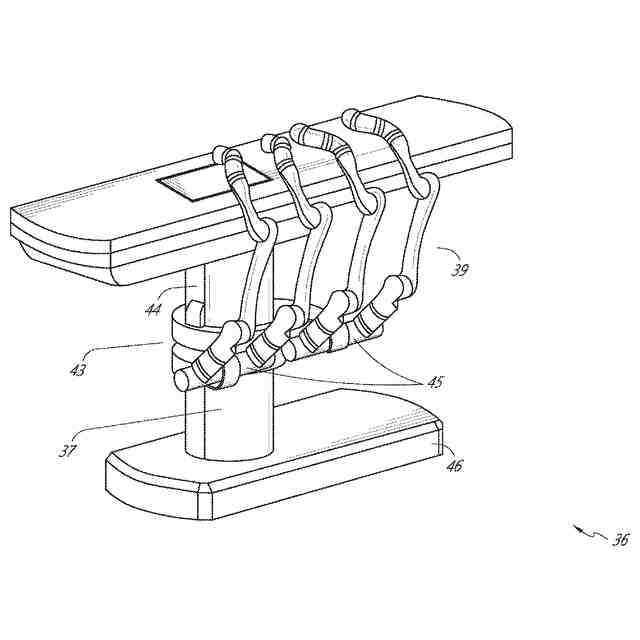
例示的な実施形態による、電磁場発生器の設定及び載置を容易にし、その作業体積を拡張するために構成されたロボット制御可能な電磁場発生器を含む、ロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、電磁場発生器の設定及び載置を容易にし、その作業体積を拡張するために構成されたロボット制御可能な電磁場発生器を含む、ロボット医療システムの一実施形態を示す図である。
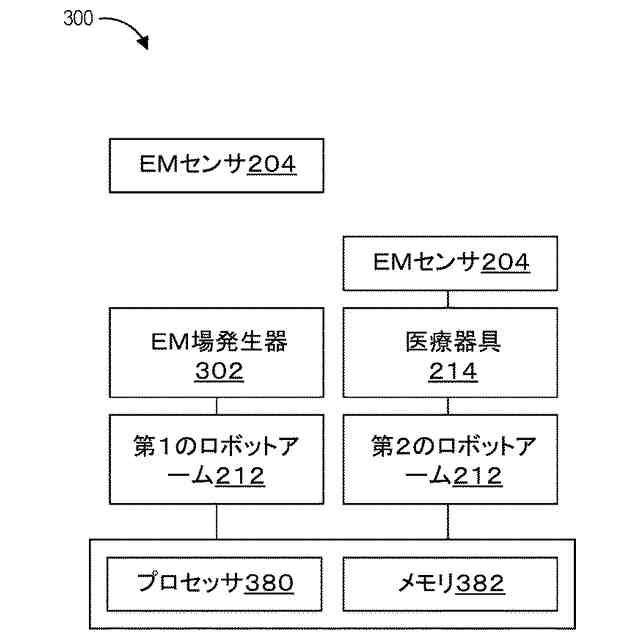
例示的な実施形態による、システムのロボットアームに結合されたロボット制御可能な電磁場発生器を含むロボット医療システムの一実施形態を表すブロック図である。
例示的な実施形態による、EMセンサがEM場内の所定の位置に位置決めされるように、ロボットアームを用いてEM場発生器を移動させる例を示す斜視図である。
例示的な実施形態による、EMセンサがEM場内の所定の位置に位置決めされるように、ロボットアームを用いてEM場発生器を移動させる例を示す斜視図である。
例示的な実施形態による、EMセンサがEM場内の所定の領域内に位置決めされるように、ロボットアームを用いてEM場発生器を移動させる例を示す斜視図である。
例示的な実施形態による、EMセンサがEM場内の所定の領域内に位置決めされるように、ロボットアームを用いてEM場発生器を移動させる例を示す斜視図である。
例示的な実施形態による、EMセンサの移動経路を追跡する経路に沿って、ロボットアームを用いてEM場発生器を移動させる例を示す斜視図である。
例示的な実施形態による、EMセンサの移動経路を追跡する経路に沿って、ロボットアームを用いてEM場発生器を移動させる例を示す斜視図である。
例示的な実施形態による、経路に沿って移動するEMセンサがEM場の所定の領域内に位置決めされたままとなるようにロボットアームを用いてEM場発生器を移動させる例を示す斜視図である。
例示的な実施形態による、経路に沿って移動するEMセンサがEM場の所定の領域内に位置決めされたままとなるようにロボットアームを用いてEM場発生器を移動させる例を示す斜視図である。
例示的な実施形態による、経路に沿って移動するEMセンサがEM場の所定の領域内に位置決めされたままとなるようにロボットアームを用いてEM場発生器を移動させる例を示す斜視図である。
例示的な実施形態による、経路に沿って移動するEMセンサがEM場の所定の領域内に位置決めされたままとなるようにロボットアームを用いてEM場発生器を移動させる例を示す斜視図である。
例示的な実施形態による、ロボットアームに結合されたEM場発生器を、EM場内のEMセンサの決定された位置に基づいて移動させるための例示的な方法を提供するフローチャートである。
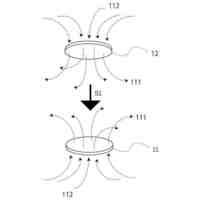
例示的な実施形態による、EM場内の複数のEMセンサの決定された位置に基づいて、ロボットアームを使用して、EM場発生器を電磁場発生器位置に移動させる例を示す斜視図である。
例示的な実施形態による、EM場内の複数のEMセンサの決定された位置に基づいて、ロボットアームを使用して、EM場発生器を電磁場発生器位置に移動させる例を示す斜視図である。
例示的な実施形態による、EM場発生器の電磁場発生器位置を、EM場内の複数のEMセンサの決定された位置に基づいて、ロボットアームを使用して再調整する例を示す斜視図であり、複数のEMセンサのうちの少なくとも1つは移動している。
例示的な実施形態による、EM場発生器の電磁場発生器位置を、EM場内の複数のEMセンサの決定された位置に基づいて、ロボットアームを使用して再調整する例を示す斜視図であり、複数のEMセンサのうちの少なくとも1つは移動している。
例示的な実施形態による、EM場発生器の電磁場発生器位置を、EM場内の複数のEMセンサの決定された位置に基づいて、ロボットアームを使用して再調整する例を示す斜視図であり、複数のEMセンサのうちの少なくとも1つは移動している。
例示的な実施形態による、ロボットアーム上に搭載されたEM場発生器の電磁場発生器位置を、EM場内の複数のEMセンサの決定された位置に基づいて決定するための例示的な方法を示すフローチャートである。
例示的な実施形態による、電磁場発生器の作業体積を拡張するようにロボットアームとともに移動され得るロボット制御可能な電磁場発生器を含む、ロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、電磁場発生器の作業体積を拡張するようにロボットアームとともに移動され得るロボット制御可能な電磁場発生器を含む、ロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、電磁場発生器の作業体積を拡張するようにロボットアームとともに移動され得るロボット制御可能な電磁場発生器を含む、ロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、EMセンサの位置を検出し、電磁場発生器の作業体積を拡張するように、ロボットアームとともに移動され得るロボット制御可能な電磁場発生器を含む、ロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、EMセンサの位置を検出し、電磁場発生器の作業体積を拡張するように、ロボットアームとともに移動され得るロボット制御可能な電磁場発生器を含む、ロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、EMセンサの位置を検出し、電磁場発生器の作業体積を拡張するように、ロボットアームとともに移動され得るロボット制御可能な電磁場発生器を含む、ロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、EMセンサの位置を検出し、電磁場発生器の作業体積を拡張するように、ロボットアームとともに移動され得るロボット制御可能な電磁場発生器を含む、ロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、電磁場発生器の拡張された作業体積内のEMセンサの位置を追跡するようにロボットアームとともに移動され得るロボット制御可能な電磁場発生器を含む、ロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、電磁場発生器の拡張された作業体積内のEMセンサの位置を追跡するようにロボットアームとともに移動され得るロボット制御可能な電磁場発生器を含む、ロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、電磁場発生器の拡張された作業体積内のEMセンサの位置を追跡するようにロボットアームとともに移動され得るロボット制御可能な電磁場発生器を含む、ロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、電磁場発生器の拡張された作業体積内のEMセンサの位置を追跡するようにロボットアームとともに移動され得るロボット制御可能な電磁場発生器を含む、ロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、ロボット制御可能な電磁場発生器の作業体積を拡張するための例示的な方法を示すフローチャートである。
例示的な実施形態による、ロボット制御可能な電磁場発生器の作業体積を拡張するための別の例示的な方法を示すフローチャートである。
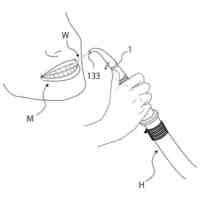
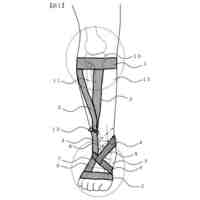
例示的な実施形態による、経皮的に挿入可能な器具とEMターゲットとの整合を容易にするように構成されたロボット制御可能な電磁場発生器を有するロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、経皮的に挿入可能な器具とEMターゲットとの整合を容易にするように構成されたロボット制御可能な電磁場発生器を有するロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、経皮的に挿入可能な器具とEMターゲットとの整合を容易にするように構成されたロボット制御可能な電磁場発生器を有するロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、電磁場発生器上に搭載された器具ガイドと、EMターゲットとの整合を容易にするように構成されたロボット制御可能な電磁場発生器を有するロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、電磁場発生器上に搭載された器具ガイドと、EMターゲットとの整合を容易にするように構成されたロボット制御可能な電磁場発生器を有するロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、器具ガイドとEMターゲットとの整合を容易にするように構成されたロボット制御可能な電磁場発生器を有するロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、器具ガイドとEMターゲットとの整合を容易にするように構成されたロボット制御可能な電磁場発生器を有するロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、ロボット制御可能な電磁場発生器を使用して、経皮的に挿入可能な器具をEMターゲットと整合させるための方法を示すフローチャートである。
例示的な実施形態による、ロボット制御可能な電磁場発生器を使用して、経皮的に挿入可能な器具のための器具ガイドをEMターゲットと整合させるための方法を示すフローチャートである。
例示的な実施形態による、EM歪みを検出するために、固定されたEM位置センサに対してEM場発生器を移動させるロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、図46AのEM場発生器の移動中のロボット軌道とEMセンサ軌道との比較を示す図である。
例示的な実施形態による、位置及び向きの変化を考慮することができるEM歪みを検出するために、固定されたEM位置センサに対してEM場発生器を移動させるロボット医療システムの一実施形態を示す図である。
例示的な実施形態による、EM歪み検出のための例示的な方法を示すフローチャートである。
例示的な実施形態による、EM歪み検出のための別の例示的な方法を示すフローチャートである。
例示的な実施形態による、超音波プローブの撮像面を較正するための手順の間、超音波プローブが取り付けられているロボット医療システムを示す図である。
EM場発生器及び超音波プローブを含むロボット医療システムを示す図である。例示的な実施形態によれば、超音波プローブの撮像面は、ロボットツール及びEMセンサの位置を撮像面上にオーバーレイすることができるように、ロボット座標フレーム及びEM座標フレームに対して較正される。
例示的な実施形態による、ロボット医療システムとともに使用するための超音波プローブの撮像面を較正する例示的な方法を示すフローチャートである。
例示的な実施形態による、ロボット医療システムのロボットアームに取り付けられた深度センサを使用して生成された例示的な熱及び点マップを示す図である。
例示的な実施形態による、ロボット医療システムのロボットアームに取り付けられた深度センサを使用して生成された例示的な熱及び点マップを示す図である。
例示的な実施形態による、例示的な深度センサの一実施形態を示す図である。
【発明を実施するための形態】
【0009】
1.概論。
本開示の態様は、腹腔鏡などの低侵襲性処置、及び内視鏡などの非侵襲性処置の両方を含む、様々な医療処置を行うことができるロボット対応の医療システムに統合され得る。内視鏡処置のうち、システムは、気管支鏡検査、尿管鏡検査、胃鏡検査などを行うことができる。
【0010】
幅広い処置を行うことに加えて、システムは、医師を支援するための強調された撮像及び誘導などの追加の利益を提供することができる。追加的に、システムは、厄介な腕の運動及び姿勢を必要とせずに、人間工学的位置から処置を行う能力を医師に提供することができる。また更に、システムは、システムの器具のうちの1つ又は2つ以上が単一のユーザによって制御され得るように、改善された使いやすさで処置を行う能力を医師に提供することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
健康器具
7日前
個人
歯の掃除具
3か月前
個人
鼾防止用具
3日前
個人
歯茎みが品
1か月前
個人
塗り薬塗り具
2か月前
個人
身体牽引装置
3か月前
個人
乗馬テラピー
4か月前
個人
マッサージ機
18日前
個人
導電香
24日前
個人
脈波測定方法
3日前
個人
脈波測定方法
10日前
個人
片足歩行支援具
1か月前
個人
染毛方法
3か月前
個人
収納容器
2か月前
個人
健康器具
2か月前
個人
クリップ
1か月前
個人
発熱器具
3か月前
個人
口内洗浄具
10日前
個人
動体視力強化装置
4か月前
個人
磁器治療器
4か月前
個人
眼科診療車
1か月前
株式会社ナカニシ
生検針
4か月前
個人
除菌システム
1か月前
個人
血管硬化度算出方法
4か月前
個人
避難困難者救出台車
1か月前
東レ株式会社
下肢着用具
4か月前
株式会社コーセー
美爪料
1か月前
株式会社 MTG
浴用剤
25日前
株式会社コーセー
化粧料
1か月前
東レ株式会社
吸収制御剤
3か月前
個人
尿バッグカバー
25日前
株式会社ニデック
眼科装置
1か月前
株式会社ニデック
眼科装置
1か月前
大正製薬株式会社
内服液剤
4か月前
個人
腰用サポーター
3日前
株式会社ニデック
眼科装置
4か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ