TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025014482
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023117068
出願日
2023-07-18
発明の名称
移動体システム、移動体、移動体制御方法およびプログラム
出願人
日本電気株式会社
代理人
個人
,
個人
主分類
G05D
1/43 20240101AFI20250123BHJP(制御;調整)
要約
【課題】移動体が移動する際、移動体の位置の、移動体が進行するべき経路からのずれの方向を検出できるようにする。
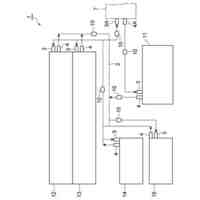
【解決手段】移動体システムが、送信アンテナと移動体とを備え、前記送信アンテナは、電波を送信する複数の送信手段を備え、これら複数の送信手段から、電波の打ち消し合いによるヌルが形成される電波を送信し、前記移動体は、前記送信アンテナからの電波を受信する受信アンテナと、受信電波の位相に基づいて、前記移動体の位置の、前記送信アンテナからの電波がヌルとなる経路である予定経路からのずれの方向を検出する位置ずれ検出手段と、前記ずれの方向に基づいて、前記移動体が前記予定経路に近づくように前記移動体の進行方向を決定する進行方向決定手段と、決定された進行方向に前記移動体を移動させる駆動手段と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
送信アンテナと移動体とを備え、
前記送信アンテナは、電波を送信する複数の送信手段を備え、これら複数の送信手段から、電波の打ち消し合いによるヌルが形成される電波を送信し、
前記移動体は、
前記送信アンテナからの電波を受信する受信アンテナと、
受信電波の位相に基づいて、前記移動体の位置の、前記送信アンテナからの電波がヌルとなる経路である予定経路からのずれの方向を検出する位置ずれ検出手段と、
前記ずれの方向に基づいて、前記移動体が前記予定経路に近づくように前記移動体の進行方向を決定する進行方向決定手段と、
決定された進行方向に前記移動体を移動させる駆動手段と、
を備える、
移動体システム。
続きを表示(約 1,600 文字)
【請求項2】
前記位置ずれ検出手段は、前記受信電波の強度に基づいて、前記ずれの大きさを検出する、
請求項1に記載の移動体システム。
【請求項3】
前記送信アンテナは、第1のタイミングでは、前記複数の送信手段から、電波の打ち消し合いによるヌルが形成される電波を送信し、第2のタイミングでは、前記複数の送信手段から、電波の強め合いによるピークが形成される電波を送信し、
前記位置ずれ検出手段は、前記第1のタイミングでの受信電波の強度と、前記第2のタイミングでの受信電波の強度との比較に基づいて、前記ずれの大きさを検出する、
請求項2に記載の移動体システム。
【請求項4】
前記送信アンテナは、前記ヌルが形成される電波として、指向性が比較的強い電波と、指向性が比較的弱い電波とを送信し、
前記位置ずれ検出手段は、前記指向性が比較的強い電波に基づいて前記ずれの方向を検出できない場合は、前記指向性が比較的弱い電波に基づいて、前記ずれの方向を検出する、
請求項1に記載の移動体システム。
【請求項5】
前記送信アンテナである第一送信アンテナと、
前記第一送信アンテナが送信した電波の受信可能領域と、受信可能領域の一部が重なるように電波を送信する前記送信アンテナである第二送信アンテナと、
を備え、
前記位置ずれ検出手段は、前記第一送信アンテナからの電波に基づいて前記ずれの方向を検出しているときに、前記第二送信アンテナからの電波を受信していると判定すると、前記ずれの方向の検出に用いる電波を、前記第一送信アンテナからの電波から、前記第二送信アンテナからの電波に切り替える、
請求項1に記載の移動体システム。
【請求項6】
前記送信アンテナは、第1の方向の経路にてヌルとなる電波である第1の方向の電波と、前記第1の方向から来た移動体を前記第1の方向とは異なる第2の方向の経路へ誘導する誘導電波と、前記第2の方向の経路にてヌルとなる電波である第2の方向の電波とを送信する、
請求項1に記載の移動体システム。
【請求項7】
前記送信アンテナは、前記誘導電波として、予め定められた方向にヌルが形成されるように電波を送信し、
前記位置ずれ検出手段は、前記移動体の位置と、前記誘導電波のヌルが形成されている位置からのずれの方向を検出し、
前記進行方向決定手段は、前記移動体の進行方向を、前記誘導電波のヌルが成す軸を中心に回転する方向に決定する、
請求項6に記載の移動体システム。
【請求項8】
前記送信アンテナは、前記誘導電波として、前記第1の方向からの角度と前記第2の方向からの角度とが等しい方向にヌルが形成されるように電波を送信する、
請求項7に記載の移動体システム。
【請求項9】
複数の送信手段を備える送信アンテナが、それら複数の送信手段から送信する、電波の打ち消し合いによるヌルが形成される電波を受信する受信アンテナと、
受信電波の位相に基づいて、移動体の位置の、前記送信アンテナからの電波がヌルとなる経路である予定経路からのずれの方向を検出する位置ずれ検出手段と、
前記ずれの方向に基づいて、前記移動体が前記予定経路に近づくように前記移動体の進行方向を決定する進行方向決定手段と、
決定された進行方向に前記移動体を移動させる駆動手段と、
を備える移動体。
【請求項10】
前記位置ずれ検出手段は、前記受信電波の強度に基づいて、前記ずれの大きさを検出する、
請求項9に記載の移動体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体システム、移動体、移動体制御方法およびプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
移動体が移動する際、移動体が進行するべき経路が示される場合がある。
例えば、特許文献1記載の設備点検システムでは、標識装置がレーザ光を送信し、ドローンは、レーザ光を受信し続けるように飛行する。
【先行技術文献】
【特許文献】
【0003】
特開2019-209861号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
移動体が移動する際、移動体の位置の、移動体が進行するべき経路からのずれの方向を検出できることが好ましい。
【0005】
本発明の目的の一例は、上述の課題を解決することのできる移動体システム、移動体、移動体制御方法およびプログラムを提供することである。
【課題を解決するための手段】
【0006】
本発明の第1の態様によれば、移動体システムは、送信アンテナと移動体とを備え、前記送信アンテナは、電波を送信する複数の送信手段を備え、これら複数の送信手段から、電波の打ち消し合いによるヌルが形成される電波を送信し、前記移動体は、前記送信アンテナからの電波を受信する受信アンテナと、受信電波の位相に基づいて、前記移動体の位置の、前記送信アンテナからの電波がヌルとなる経路である予定経路からのずれの方向を検出する位置ずれ検出手段と、前記ずれの方向に基づいて、前記移動体が前記予定経路に近づくように前記移動体の進行方向を決定する進行方向決定手段と、決定された進行方向に前記移動体を移動させる駆動手段と、を備える。
【0007】
本発明の第2の態様によれば、移動体は、複数の送信手段を備える送信アンテナが、それら複数の送信手段から送信する、電波の打ち消し合いによるヌルが形成される電波を受信する受信アンテナと、受信電波の位相に基づいて、移動体の位置の、前記送信アンテナからの電波がヌルとなる経路である予定経路からのずれの方向を検出する位置ずれ検出手段と、前記ずれの方向に基づいて、前記移動体が前記予定経路に近づくように前記移動体の進行方向を決定する進行方向決定手段と、決定された進行方向に前記移動体を移動させる駆動手段と、を備える。
【0008】
本発明の第3の態様によれば、移動体制御方法は、移動体を制御するコンピュータが、複数の送信手段を備える送信アンテナが、それら複数の送信手段から送信する、電波の打ち消し合いによるヌルが形成される電波を受信する受信アンテナによる受信電波の位相に基づいて、前記移動体の位置の、前記送信アンテナからの電波がヌルとなる経路である予定経路からのずれの方向を検出し、前記ずれの方向に基づいて、前記移動体が前記予定経路に近づくように前記移動体の進行方向を決定し、決定された進行方向に前記移動体を移動させる、ことを含む。
【0009】
本発明の第4の態様によれば、プログラムは、移動体を制御するコンピュータに、複数の送信手段を備える送信アンテナが、それら複数の送信手段から送信する、電波の打ち消し合いによるヌルが形成される電波を受信する受信アンテナによる受信電波の位相に基づいて、前記移動体の位置の、前記送信アンテナからの電波がヌルとなる経路である予定経路からのずれの方向を検出することと、前記ずれの方向に基づいて、前記移動体が前記予定経路に近づくように前記移動体の進行方向を決定することと、決定された進行方向に前記移動体を移動させることと、を実行させるためのプログラムである。
【発明の効果】
【0010】
本発明によれば、移動体が移動する際、移動体の位置の、移動体が進行するべき経路からのずれの方向を検出することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
2か月前
個人
無人作業システム
18日前
ugo株式会社
移動体
2か月前
村田機械株式会社
産業機械
1か月前
アズビル株式会社
制御装置
11日前
株式会社ダイヘン
移動体
2か月前
神港テクノス株式会社
制御装置
2か月前
株式会社ダイヘン
移動体
2か月前
トヨタ自動車株式会社
自律移動体
2か月前
コフロック株式会社
流量制御装置
12日前
トヨタ自動車株式会社
自律移動体
1か月前
株式会社丸和製作所
入力機器
11日前
株式会社クボタ
作業車
1か月前
トヨタ自動車株式会社
配送システム
2か月前
株式会社明電舎
車両
1か月前
株式会社フジキン
流体制御装置
2か月前
アズビル株式会社
パラメータ調整装置
1か月前
株式会社フジキン
流量制御装置
11日前
株式会社豊田自動織機
荷役車両
4日前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
位置推定システム
2か月前
トヨタ自動車株式会社
自律移動システム
2か月前
株式会社ダイフク
搬送設備
19日前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社村田製作所
温度補償回路
18日前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社FUJI
工作機械の操作システム
3か月前
株式会社ダイフク
物品搬送設備
25日前
株式会社ダイフク
物品搬送設備
19日前
株式会社ダイフク
物品搬送設備
19日前
ローム株式会社
電源回路
2か月前
キヤノン株式会社
情報処理装置
1か月前
ローム株式会社
電源回路
2か月前
株式会社ダイフク
物品搬送設備
2か月前
旭精機工業株式会社
監視データ処理装置
26日前
村田機械株式会社
搬送車システム
2か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ