TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025013819
公報種別
公開特許公報(A)
公開日
2025-01-28
出願番号
2024174346,2022201298
出願日
2024-10-03,2018-08-17
発明の名称
穿孔の深さを測定可能な手術用ハンドピースおよび関連付属品
出願人
ストライカー・コーポレイション
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
A61B
17/16 20060101AFI20250121BHJP(医学または獣医学;衛生学)
要約
【課題】本開示は、穿孔の深さを測定可能な手術用ハンドピースおよび関連付属品に
関する。
【解決手段】ドリルビットは、軸に沿って延びたシャンクと、第1のインターフェース距離で軸から離隔した少なくとも1つの最外駆動部を備えたインターフェースと、を備える。ドリルビットは、シャンクの近位端から延びた弾性アームをさらに備える。弾性アームは、軸に対向しない外側アーム面と、シャンクの遠位端に対向する保持面と、を備える。保持面は、最外駆動部に対して、軸周りに半径方向に位置合わせされていてもよい。弾性アームは、第1のインターフェース距離よりも大きな第1のアーム距離で外側アーム面が軸から離隔する第1の位置と第1のインターフェース距離以下の第2のアーム距離で外側アーム面が軸から離隔する第2の位置との間で移動可能である。
【選択図】図1
特許請求の範囲
【請求項1】
ドリルビットおよび手術用アタッチメントモジュールにトルクを伝達するための手術用
ハンドピースであって、
近位領域および遠位領域を備え、前記遠位領域が前記手術用アタッチメントモジュール
に取り外し可能に結合されるように構成されたハウジングアセンブリと、
前記近位領域に隣接して前記ハウジングアセンブリ内に配設され、電源から電力を受電
してトルクを生成するように構成されたモータと、
前記ハウジングアセンブリに結合され、ユーザにより作動されるように構成されたユー
ザ入力装置と、
前記ユーザ入力装置に結合され、前記ユーザ入力装置の作動に応じて信号を生成するよ
うに構成されたセンサと、
前記センサおよび前記モータに結合され、前記センサにより生成された前記信号を受信
し、トルクを生成するために前記モータを動作させるように構成されたコントローラと、
前記ハウジングアセンブリに対して回転可能に結合され、前記モータからトルクを受け
て応答的に回転するように構成され、近位端と遠位端との間で長手方向軸に沿って延びる
駆動カニューレであって、
前記近位端に隣接した被駆動部を画成し、前記被駆動部が前記モータからトルクを受
けるように構成された外面と、
前記長手方向軸に沿って延び前記ドリルビットを受容するように構成されたボアを画
成する内面であって、前記駆動カニューレの前記近位端に隣接し、トルクを前記ドリルビ
ットに伝達するように構成された第1の駆動部を備えた内面と、
前記遠位端に隣接し、トルクを前記手術用アタッチメントモジュールに伝達するよう
に構成された第2の駆動部を備え、前記第1の駆動部と前記第2の駆動部とが互いに幾何
学的に異なる、遠位突起部と、を有する駆動カニューレと、
を備えた、手術用ハンドピース。
続きを表示(約 2,000 文字)
【請求項2】
前記駆動カニューレの前記外面が、前記長手方向軸に概して平行で、前記被駆動部を構
成する1つまたは複数の溝を画成する、請求項1に記載の手術用ハンドピース。
【請求項3】
前記駆動カニューレの前記外面が、前記長手方向軸に対して外方に延び、前記被駆動部
を構成する1つまたは複数の突出部を備えた、請求項1または2に記載の手術用ハンドピ
ース。
【請求項4】
前記内面が、前記第1の駆動部を構成する少なくとも2つの平面を備えた、請求項1か
ら3のいずれか1項に記載の手術用ハンドピース。
【請求項5】
前記内面が、前記第1の駆動部を構成する6つの平面を備えた、請求項4に記載の手術
用ハンドピース。
【請求項6】
前記駆動カニューレが、前記近位端から前記遠位端に向かって延びた本体部を備え、前
記遠位突起部が、前記本体部から前記遠位端まで前記長手方向軸に概して平行に遠位方向
へと延びて、前記手術用アタッチメントモジュールとの結合によりトルクを伝達するよう
に構成された駆動ドッグを構成する、請求項1から5のいずれか1項に記載の手術用ハン
ドピース。
【請求項7】
前記駆動カニューレが、前記近位端に隣接する近位領域および前記遠位端に隣接する遠
位領域を備え、前記近位領域における前記駆動カニューレの前記内面が、前記近位領域の
前記ボアを画成する第1の断面積を有し、前記遠位領域における前記駆動カニューレの前
記内面が、前記遠位領域の前記ボアを画成する前記第1の断面積よりも大きな第2の断面
積を有し、前記内面が、前記近位領域と前記遠位領域との間の遷移面を備え、前記遷移面
が、前記遠位領域から前記長手方向軸に向かうテーパ状であり、前記ボアを通って前記第
1の駆動部に対する適正配向までの前記ドリルビットのガイドを補助するように構成され
た、請求項1から6のいずれか1項に記載の手術用ハンドピース。
【請求項8】
手術用ハンドピースシステムであって、
近位領域および遠位領域を有するハンドピースハウジングアセンブリであって、
前記ハンドピースハウジングアセンブリに対して回転可能に結合され、モータからト
ルクを受けて応答的に回転するように構成され、近位端と遠位端との間で長手方向軸に沿
って延びた駆動カニューレを備え、前記駆動カニューレは、
前記近位端に隣接し、前記モータからトルクを受けるように構成された被駆動部を備
えた外面と、
前記長手方向軸に沿って延びたボアを画成する内面で、前記近位端に隣接して第1の
駆動部を備えた、内面と、
前記遠位端に隣接し、第2の駆動部を備えた遠位突起部と、
を備えたハンドピースアセンブリと、
近位端が前記第1の駆動部からトルクを受けるように位置決めされ、遠位端が前記ハン
ドピースハウジングアセンブリから延びるように前記駆動カニューレの前記ボアに少なく
とも一部が受容される係合位置へと移動可能なドリルビットと、
駆動シャフトを有し、前記駆動シャフトが前記遠位突起部に結合されるように前記遠位
領域に隣接して前記ハンドピースハウジングアセンブリに結合される係合位置へと移動可
能な手術用アタッチメントモジュールであり、前記第2の駆動部からトルクを受けるよう
に構成され、前記第1の駆動部が前記第2の駆動部と幾何学的に異なる、手術用アタッチ
メントモジュールと、
を備えた、手術用ハンドピースシステム。
【請求項9】
前記手術用アタッチメントモジュールが、矢状鋸アセンブリ、往復式鋸アセンブリ、ド
リルチャックアセンブリ、リーマアセンブリ、ワイヤ駆動アセンブリ、およびバリ取りア
センブリのうちの1つを備えた、請求項8に記載の手術用ハンドピースシステム。
【請求項10】
前記ハンドピースハウジングアセンブリの前記遠位領域に隣接して、前記ハンドピース
ハウジングアセンブリに対して取り外し可能に結合可能な測定モジュールであり、前記ド
リルビットが前記係合位置にある場合に前記ドリルビットと関連付けられた測定機能を実
行するように構成され、前記遠位領域に隣接して前記ハンドピースハウジングアセンブリ
に結合されるように構成された測定結合器と、測定ハウジングおよび前記測定ハウジング
に対して摺動可能に結合された奥行きカニューレとを備えた、測定モジュールをさらに備
えた、請求項8または9に記載の手術用ハンドピースシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
[関連出願の相互参照]
本特許出願は、2018年2月2日に出願された米国特許出願第15/887,507
号、2017年8月21日に出願された米国仮特許出願第62/548,357号、20
18年1月17日に出願された米国仮特許出願第62/618,134号、および201
7年8月17日に出願された米国仮特許出願第62/546,760号に対する優先権お
よびそのすべての利益を主張するものであり、これらのすべての開示内容を本明細書に援
用する。
続きを表示(約 8,200 文字)
【0002】
本開示は、一般的に、穿孔の深さを測定可能な手術用ハンドピースおよび関連付属品に
関する。
【背景技術】
【0003】
従来の医療的処置および外科的処置には通常、外科医による手術部位への到達および手
術部位の操作を可能にする手術道具および手術器具の使用を伴う。非限定的な一例として
は、外傷、スポーツ傷害、変性疾患、関節再建等のさまざまな筋骨格疾患に対処するため
、整形外科的処置に関連して手持ち式ドリル等の回転器具が通常利用される。手持ち式ド
リルまたは類似の手術器具が採用される処置においては、アクチュエータ(たとえば、電
動機)により選択的に生成される回転トルクの使用により、脱着可能なドリルビットまた
は他の手術用アタッチメントを異なる速度で回転させる。医療的処置および外科的処置に
関連して利用されるドリルビットは通常、処置ごとに交換される使い捨てのコンポーネン
トとして実現される。
【発明の概要】
【0004】
多様な異なる種類の医療的処置および/または外科的処置の実行の補助として、手持ち
式手術器具およびドリルビットが通常利用されるものの、当技術分野においては、このよ
うなドリルビットおよび手持ち式手術器具の継続的な改善が求められている。
【図面の簡単な説明】
【0005】
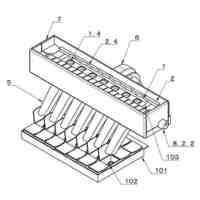
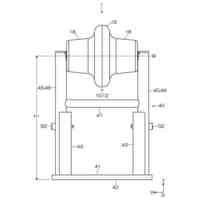
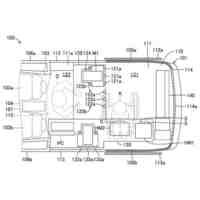
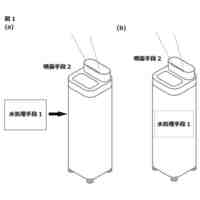
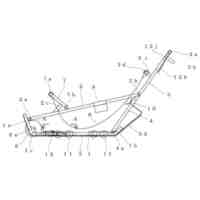
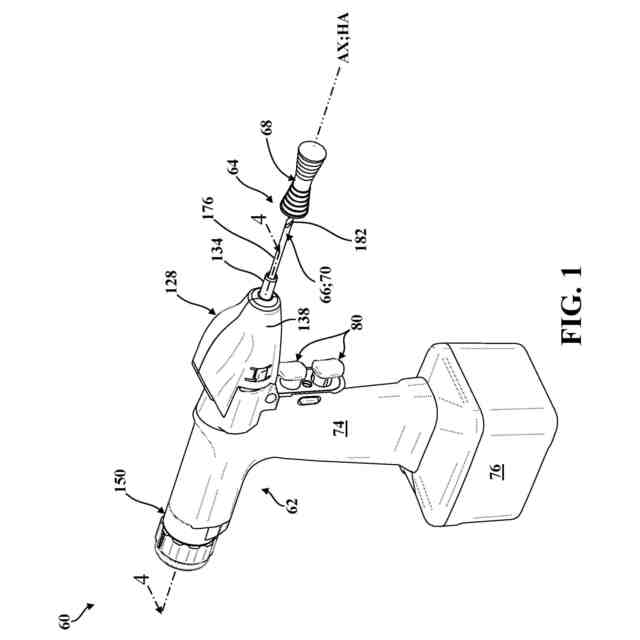
一構成に係る、ドリルビットおよび先端保護装置を有することを示した手術用ハンドピースアセンブリならびに測定モジュールを備えた手術用ハンドピースシステムの斜視図である。
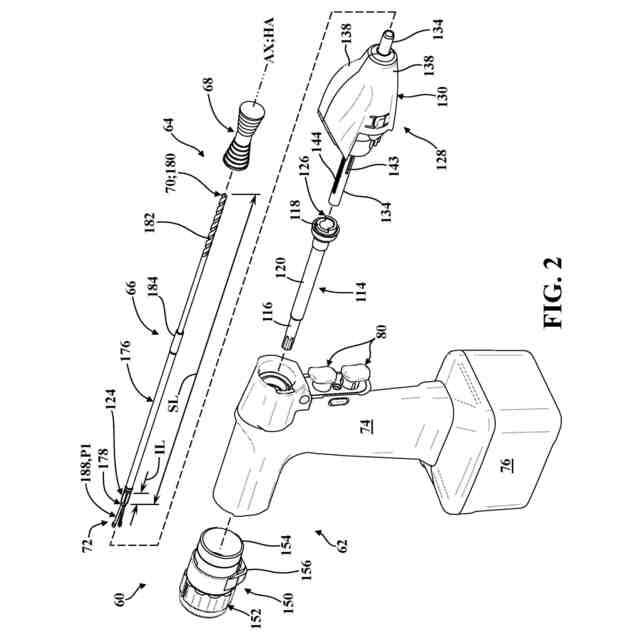
エンドエフェクタアセンブリが手術用ハンドピースアセンブリから取り外され、先端保護装置がドリルビットの遠位切断先端部から離隔した状態で、ハンドピースハウジングアセンブリから離隔した測定モジュール、駆動カニューレ、および解除アセンブリを有することを示した、図1の手術用ハンドピースシステムの一部分解斜視図である。
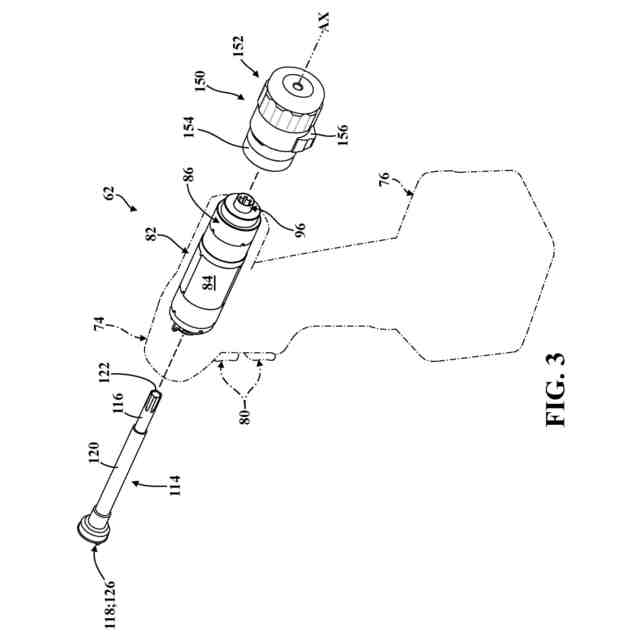
アクチュエータアセンブリを示すために駆動カニューレおよび解除アセンブリがハンドピースハウジングアセンブリの仮想外形から離隔した状態で示した、図1および図2の手術用ハンドピースアセンブリの一部の一部分解斜視図である。
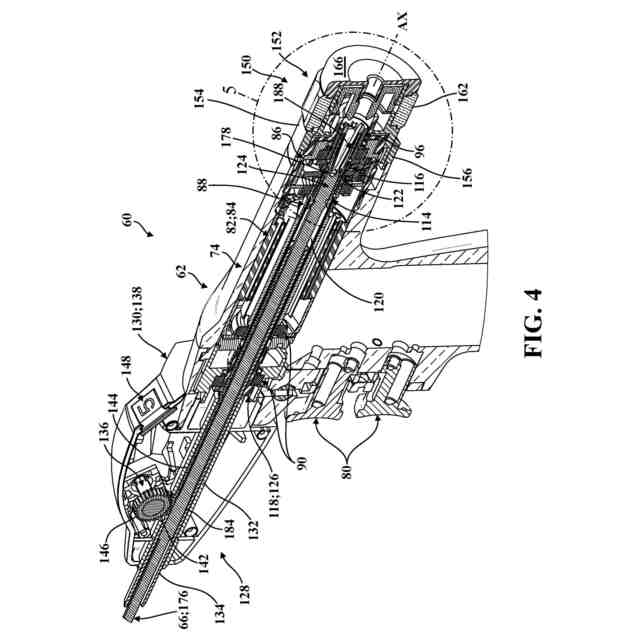
図1の線4-4に沿う部分等角断面図である。
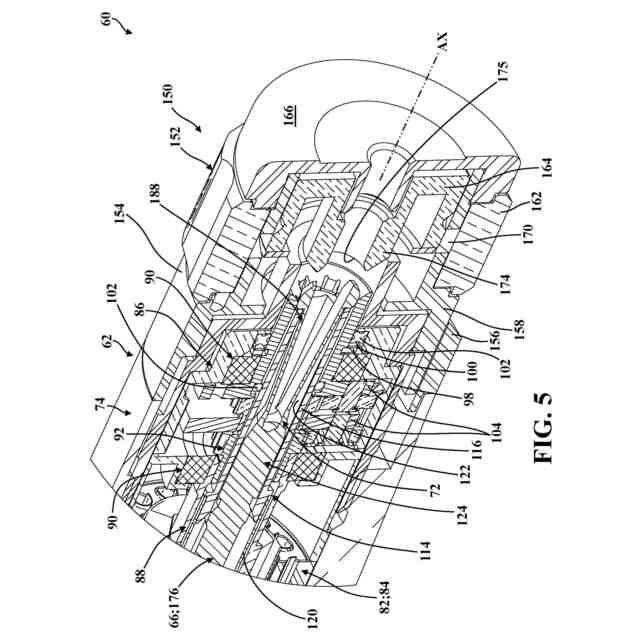
図4の印5における拡大詳細図である。
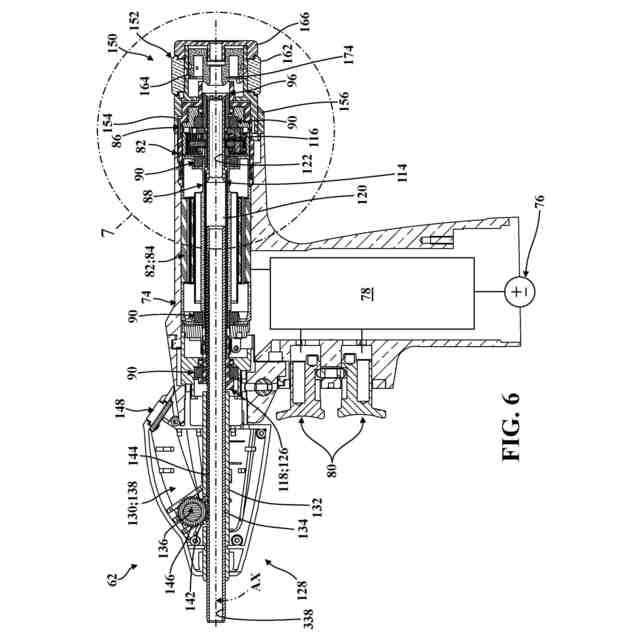
エンドエフェクタアセンブリが取り外された図1~図5の手術用ハンドピースアセンブリの長手方向の断面図である。
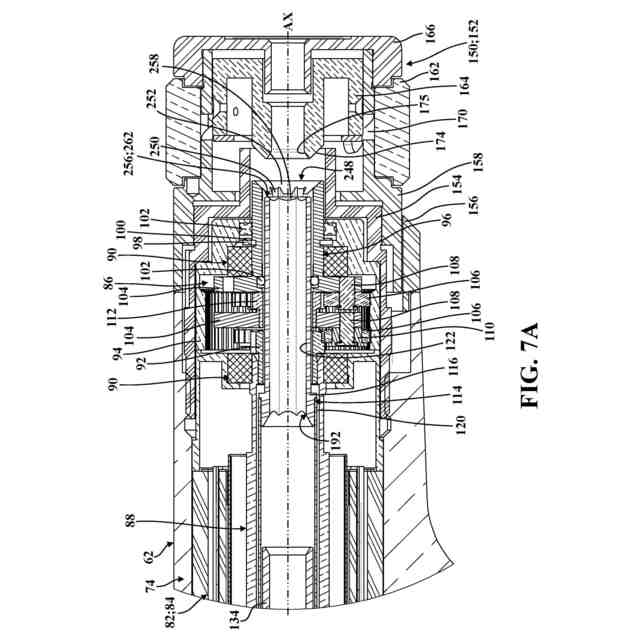
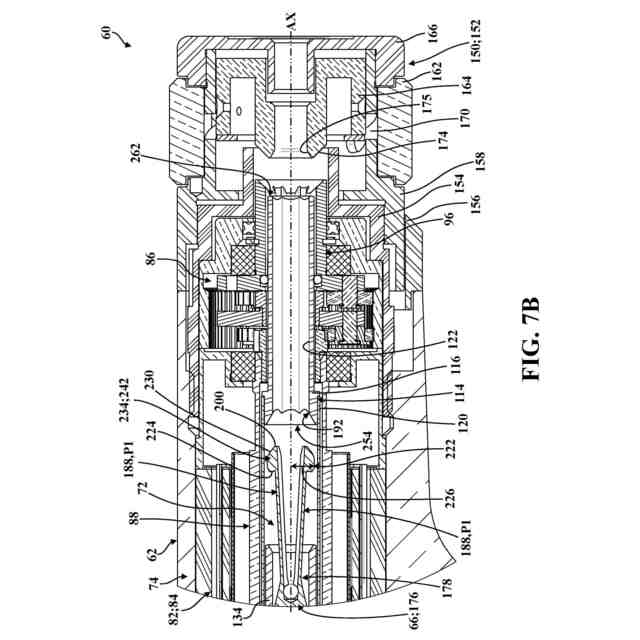
ハンドピースハウジングアセンブリ内の測定モジュール、駆動カニューレ、解除アセンブリ、およびアクチュエータアセンブリの一部を示した、図6の印7における拡大詳細図である。
ドリルビットの近位端に配置された一対の弾性アームが駆動カニューレの近位部に近づく状態を示した、図1および図7Aの手術用ハンドピースシステムの別の拡大詳細図である。
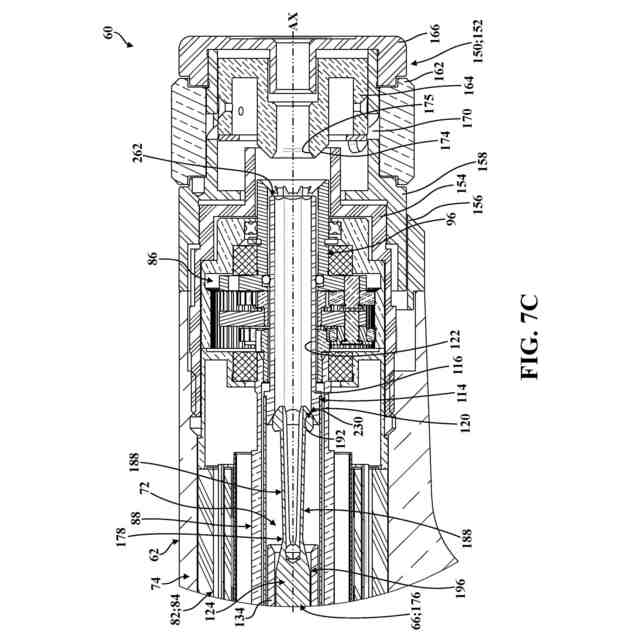
ドリルビットの弾性アームが駆動カニューレの近位部の座面に対して係合するとともに、互いに近づくように曲がった状態を示した、図7Aおよび図7Bの手術用ハンドピースシステムの別の拡大詳細図である。
ドリルビットの弾性アームが駆動カニューレの近位部のボア内に配設され、ドリルビットが、弾性アームが延びる近位端を備えたシャンクと、シャンクに結合されたストッパと、シャンクに結合され、ストッパと近位端との間に介在されたインターフェースとを有する状態を示した、図7A~図7Cの手術用ハンドピースシステムの別の拡大詳細図である。
ドリルビットの弾性アームがさらに、駆動カニューレの近位部のボア内に配設され、前記ドリルビットのインターフェースが、座面に隣接して駆動カニューレの近位部のボア内に位置決めされた状態を示した、図7A~図7Dの手術用ハンドピースシステムの別の拡大詳細図である。
保持面を有する各弾性アームが駆動カニューレの近位部の係止面に当接した状態でドリルビットの弾性アームが互いに離れるように弾性的に曲がり、ドリルビットのストッパが駆動カニューレの近位部の座面に当接してインターフェースをボア内に保持する状態を示した、図7A~図7Eの手術用ハンドピースシステムの別の拡大詳細図である。
解除アセンブリの解除部材が弾性アームに対して係合するとともに弾性アームを互いに近づくように曲げて、駆動カニューレの近位部の係止面との当接を解消するような弾性アームの保持面の移動を容易化する状態を示した、図7A~図7Fの手術用ハンドピースシステムの別の拡大詳細図である。
解除アセンブリの解除部材がさらに、弾性アームに対して係合するとともに、駆動カニューレの近位部の係止面との当接を解消するように弾性アームの保持面を曲げた状態を示した、図7A~図7Gの手術用ハンドピースシステムの別の拡大詳細図である。
解除アセンブリの解除部材が弾性アームとの係合を解除し、係止面と接触せずに隣接して、弾性アームが駆動カニューレの近位部のボア内に配設された状態を示した、図7A~図7Hの手術用ハンドピースシステムの別の拡大詳細図である。
図2~図7Iの駆動カニューレの分解斜視図である。
駆動歯車を備えたモータおよび出力ハブを備えた歯車集合を有することを示した、図3~図7Iのアクチュエータアセンブリの一部分解図である。
図9の歯車集合の分解斜視図である。
図9および図10の歯車集合の別の分解斜視図である。
保持体およびハウジングアダプタから離隔した解除サブアセンブリを有することを示した、図1~図7Iの解除アセンブリの一部分解図である。
図12の解除サブアセンブリの分解斜視図である。
図12および図13の解除サブアセンブリの別の分解斜視図である。
図3~図7Iおよび図9~図11に示す歯車集合の出力ハブに隣接して位置決めされた、図2~図8に示す駆動カニューレの近位部を示した斜視図である。
図1、図2、図4、図5、および図7B~図7Iのドリルビットのシャンクの近位端から延びた弾性アームに隣接して位置決めされることを示した、スプライン係合により同時回転するように組み立てられた図15Aの駆動カニューレの近位部および出力ハブの斜視図である。
ドリルビットの弾性アームが駆動カニューレの近位部の係止面と当接して配設された状態を示した、図15Bの駆動カニューレの近位部、出力ハブ、およびドリルビットの別の斜視図である。
別の出力ハブに隣接して位置決めされた駆動カニューレの別の近位部の斜視図である。
図15Bに示すように組み立てられた駆動カニューレの近位部および出力ハブの上面図である。
図15Bに示すように出力ハブ内に配設された駆動カニューレの近位部を示した、図16の線17-17に沿う断面図である。
図1、図2、図4、図5、図7B~図7I、図15B、および図15Cのドリルビットの弾性アームが駆動カニューレの近位部のボア内に配設された状態を示した、図17Aの駆動カニューレの近位部および出力ハブの別の断面図である。
図15Cに示すようにドリルビットの弾性アームが駆動カニューレの近位部の係止面と当接して配設された状態を示した、図17Bの駆動カニューレの近位部、出力ハブ、およびドリルビットの別の断面図である。
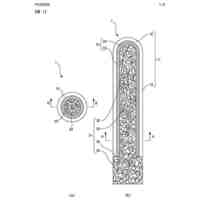
駆動カニューレの近位部のボアのプロファイルを示した、図16の線18-18に沿う断面図である。
図1、図2、図4、図5、図7B~図7I、図15B、および図15Cのドリルビットの弾性アームが駆動カニューレの近位部のボア内に配設されるとともにボアに当接し、ドリルビットが図17Bに示すように配置された状態を示した、図18Aの駆動カニューレの近位部の別の断面図である。
インターフェースが駆動カニューレの近位部のボア内に配設された状態を示した、図18Bの駆動カニューレの近位部およびドリルビットの別の断面図である。
駆動カニューレの近位部の係止面に隣接して、駆動カニューレの近位部と出力ハブとの間のスプライン係合を示した、図16の線19-19に沿う断面図である。
駆動カニューレの近位部および出力ハブの別の断面図である。
ドリルビットの弾性アームの一部が駆動カニューレの近位部のボア内に配設されるとともにボアに当接し、ドリルビットが図17Cに示すように配置された状態を示した、図19Aおよび図19Bの駆動カニューレの近位部および出力ハブの別の断面図である。
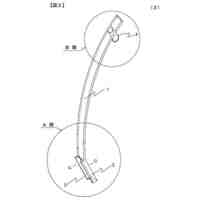
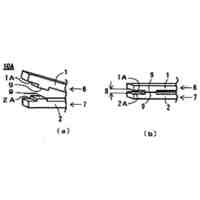
シャンクの近位端に隣接して、弾性アーム、インターフェース、およびストッパの別途詳細を示した、図1、図2、図4、図5、図7B~図7I、図15B、図15C、図17B、図17C、図19B、および図19Cのドリルビットの部分斜視図である。
図20に示すドリルビットの部分の別の部分斜視図である。
図20および図21に示すドリルビットの部分の左側面図である。
図20~図22に示すドリルビットの部分の上面図である。
ドリルビットのインターフェースが駆動カニューレの近位部のボアと位置ずれした状態を示した、図1、図2、図4、図5、図7B~図7I、図15B、および図15Cのドリルビットならびに図15Aおよび図15Bの駆動カニューレの近位部の部分斜視図である。
ドリルビットのインターフェースが駆動カニューレの近位部のボアと後で位置合わせされた状態を示した、図24Aのドリルビットおよび駆動カニューレの近位部の別の部分斜視図である。
単一の弾性アームを有することを示した、別のドリルビット構成の部分斜視図である。
図25に示すドリルビットの構成の別の部分斜視図である。
3つの弾性アームを有することを示した、別のドリルビット構成の部分斜視図である。
カニューレ装着シャンクを有することを示した、図27に示すドリルビットの構成の長手方向部分断面図である。
駆動カニューレの近位部と出力ハブとの間のスプライン係合により互いに境界を画された駆動カニューレの近位部の係止面の配置を示し、駆動カニューレの近位部のボア内に配設された鎖線によってドリルビットのインターフェースのプロファイルをさらに示し、駆動カニューレの近位部の係止面との当接およびインターフェースのプロファイルに対する弾性アームの保持面の半径方向位置合わせを示す一点鎖線によって弾性アームの配置をさらに示した、図15Cに示すように配置された駆動カニューレの近位部、出力ハブ、およびドリルビットを表す正面模式図である。
駆動カニューレの近位部の係止面と当接してサイズ設定、成形、および配置される弾性アームをドリルビットが有する構成の図29の駆動カニューレの近位部および出力ハブを表す別の正面模式図である。
概して矩形のプロファイルを有するインターフェースをドリルビットが有する構成の図29および図30の駆動カニューレの近位部および出力ハブを表す別の正面模式図である。
概して星形のプロファイルを有するインターフェースをドリルビットが有する構成の図29~図31の駆動カニューレの近位部および出力ハブを表す別の正面模式図である。
不規則形のプロファイルを有するインターフェースをドリルビットが有する構成の図29~図32の駆動カニューレの近位部および出力ハブを表す別の正面模式図である。
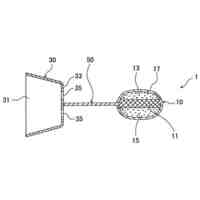
ドリルビットの遠位切断先端部が先端保護装置内に配設された状態を示した、図1および図2のエンドエフェクタアセンブリの部分斜視図である。
図1、図2、および図34に示すエンドエフェクタアセンブリの先端保護装置の斜視図である。
図35の線36-36に沿う断面図である。
エンドエフェクタアセンブリの別の先端保護装置構成の斜視図である。
図37の線38-38に沿う断面図である。
エンドエフェクタアセンブリの別の先端保護装置構成の斜視図である。
図39の線40-40に沿う断面図である。
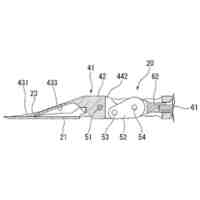
エンドエフェクタアセンブリの別の先端保護装置構成の斜視図である。
図41の線42-42に沿う断面図である。
エンドエフェクタアセンブリの別の先端保護装置構成の斜視図である。
図43の線44-44に沿う断面図である。
エンドエフェクタアセンブリの別の先端保護装置構成の斜視図である。
図45の線46-46に沿う断面図である。
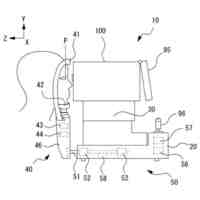
手術用ハンドピースアセンブリに隣接した手術用アタッチメントモジュールの斜視図である。
図47の手術用ハンドピースアセンブリに隣接した手術用アタッチメントモジュールの別の斜視図である。
長手方向軸に概して沿った、図47および図48の手術用ハンドピースアセンブリに結合された手術用アタッチメントモジュールの部分等角断面図である。
長手方向軸に概して直交した、図47~図49の手術用ハンドピースアセンブリの部分等角断面図である。
長手方向軸に概して直交した、図47~図50の手術用ハンドピースアセンブリに結合された手術用アタッチメントモジュールの部分等角断面図である。
手術用ハンドピースアセンブリに隣接した測定モジュールの斜視図である。
図52の手術用ハンドピースアセンブリに隣接した測定モジュールの別の斜視図である。
長手方向軸に概して沿った、図52および図53の手術用ハンドピースアセンブリに結合された測定モジュールの部分等角断面図である。
手術用ハンドピースアセンブリに隣接した別の測定モジュールの斜視図である。
図55の手術用ハンドピースアセンブリに隣接した測定モジュールの別の斜視図である。
長手方向軸に概して沿った、図55および図56の手術用ハンドピースアセンブリに結合された測定モジュールの部分等角断面図である。
図57の印58における、図55~図57の手術用ハンドピースアセンブリに結合された測定モジュールの拡大詳細図である。
図57の印59における、図55~図58の手術用ハンドピースアセンブリに結合された測定モジュールの別の拡大詳細図である。
長手方向軸に概して直交した、図55~図59の手術用ハンドピースアセンブリに結合された測定モジュールの部分等角断面図である。
長手方向軸に概して沿い、図57の図に概して直交した、図55~図60の手術用ハンドピースアセンブリに結合された測定モジュールの断面図である。
測定ハウジングの内部に配設された付勢機構を示した、図55~図61の測定モジュールの一部分解図である。
測定ハウジングの内部に配設された付勢機構を示した、図55~図62の測定モジュールの拡大図である。
図55~図63の測定モジュールの斜視図である。
ブッシュを示すとともに、測定ハウジングおよび奥行きカニューレを仮想的に示した、図55~図64の測定モジュールの斜視図である。
ブッシュの遠位部からブッシュのボアに延入する突起部を示した、図55~図64の測定モジュールの斜視図である。
【発明を実施するための形態】
【0006】
図面を参照するに、複数の図面を通して同様の構造の指定には同様の番号を使用するが
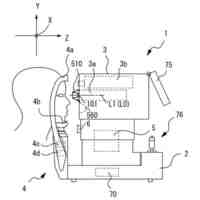
、図1および図2には、医療的処置および/または外科的処置と関連付けられた動作機能
を実行する手術用ハンドピースシステム60を示している。本明細書に示す代表的構成に
おいて、手術用ハンドピースシステム60は、骨等の患者の組織の貫通を容易化するため
に採用される。このため、手術用ハンドピースシステム60の図示の構成には、手術用ハ
ンドピースアセンブリ62と、全体を64で示すエンドエフェクタアセンブリと、を含む
。このエンドエフェクタアセンブリ64は、ドリルビット66および先端保護装置68を
備える。図2に最も良く示すように、ドリルビット66は、全体を70で示す切断先端部
と全体を72で示す挿入部との間で軸AXに沿って概して長手方向に延びる。以下により
詳しく説明する通り、切断先端部70は、組織と係合するように構成されており、挿入部
72は、ドリルビット66の手術用ハンドピースアセンブリ62への解除可能な取り付け
を容易化するように構成されている。
【0007】
ドリルビット66の手術用ハンドピースアセンブリ62への取り付けの容易化に役立つ
ように、いくつかの構成において、先端保護装置68は、ドリルビット66の切断先端部
70の少なくとも一部を隠しつつ、ドリルビット66の切断先端部70に対して解除可能
に固定されることにより、手術用ハンドピースシステム60のユーザ(たとえば、外科医
)が手術用ハンドピースアセンブリ62への取り付け中のドリルビット66を安全に操作
および位置決めできるように構成されている。エンドエフェクタアセンブリ64が手術用
ハンドピースアセンブリ62に取り付けられた後は、先端保護装置68がドリルビット6
6の切断先端部70から取り外されるため、組織の貫通に手術用ハンドピースシステム6
0を利用可能となる。先端保護装置68の構成については、図34~図46に関連して、
以下により詳しく説明する。
【0008】
ドリルビットは上述の通りであるが、当然のことながら、ドリルビットに関して説明し
た結合形状は、その他如何なる種類の手術用エンドエフェクタ(特に、カニューレ装着ド
リルビット、骨鉗子等の回転型手術用エンドエフェクタ)とも併用可能である。
【0009】
ここで図1~図19Cを参照するに、本明細書に記載の代表的構成において、手術用ハ
ンドピースアセンブリ62は、バッテリ76(詳しくは図示しないバッテリアタッチメン
ト)に対して解除可能に取り付けられるピストルグリップ形状のハンドピースハウジング
アセンブリ74を備えた手持ち式ドリルとして実現される。ただし、ハンドピースハウジ
ングアセンブリは、ピストルグリップの有無に関わらず、任意適当な形状を有し得ると考
えられる。図示の手術用ハンドピースアセンブリ62は、ハンドピースハウジングアセン
ブリ74に対して解除可能に取り付け可能で、ドリルビット66の回転に利用される電力
を手術用ハンドピースアセンブリ62に供給するバッテリ76を採用するが、当然のこと
ながら、内部の(たとえば、取り外し不可能な)バッテリまたは外部コンソール、電源等
へのテザリング接続等、他の方法で構成されていてもよい。他の構成も考えられる。
【0010】
ハンドピースハウジングアセンブリ74は、(以下により詳しく説明する)解除アセン
ブリ150に隣接する近位領域と、近位領域の反対の遠位領域と、を有する。別段の指定
のない限り、「近位(proximal)」は、ユーザがハンドピースハウジングアセン
ブリを保持する側を意味することが了解される。「遠位(distal)」は、ユーザが
ハンドピースハウジングアセンブリを保持する側から遠い側を意味することが了解される
。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
歯の掃除具
3か月前
個人
歯茎みが品
16日前
個人
錠剤撒き器
5か月前
個人
乗馬テラピー
3か月前
個人
身体牽引装置
3か月前
個人
塗り薬塗り具
2か月前
個人
マッサージ機
3日前
個人
導電香
9日前
個人
染毛方法
2か月前
個人
発熱器具
3か月前
個人
健康器具
2か月前
個人
クリップ
23日前
個人
収納容器
1か月前
個人
片足歩行支援具
24日前
個人
磁器治療器
3か月前
個人
鼻腔拡張具
5か月前
株式会社コロナ
脱臭機
5か月前
個人
眼科診療車
1か月前
個人
挟圧手工爪矯正具
5か月前
個人
動体視力強化装置
3か月前
東レ株式会社
吸収制御剤
2か月前
東レ株式会社
下肢着用具
3か月前
個人
血管硬化度算出方法
4か月前
株式会社 MTG
浴用剤
10日前
個人
除菌システム
24日前
株式会社ナカニシ
生検針
3か月前
株式会社コーセー
化粧料
24日前
株式会社コーセー
美爪料
24日前
個人
避難困難者救出台車
1か月前
個人
口腔ケア用歯ブラシ
5か月前
株式会社ファンケル
化粧料
4か月前
株式会社ニデック
眼科装置
16日前
個人
唾液分泌促進具
3か月前
株式会社ファンケル
化粧料
3か月前
個人
立位姿勢支持具
2か月前
株式会社ニデック
眼科装置
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ