TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025013387
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2024190658,2020099458
出願日
2024-10-30,2020-06-08
発明の名称
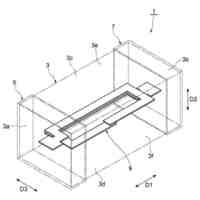
基板搬送システム及び基板搬送方法
出願人
川崎重工業株式会社
代理人
個人
主分類
H01L
21/677 20060101AFI20250117BHJP(基本的電気素子)
要約
【課題】例えばロボットのエラー発生時において、その場で状況を素早く良好に把握可能とする。
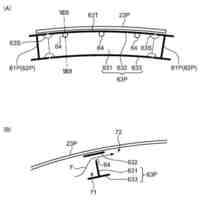
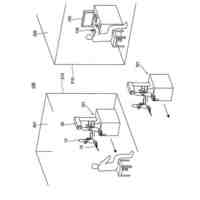
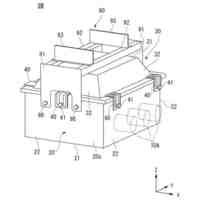
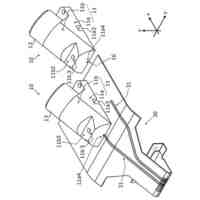
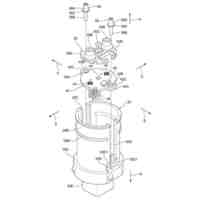
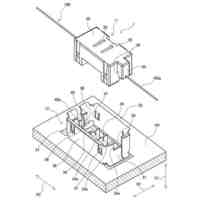
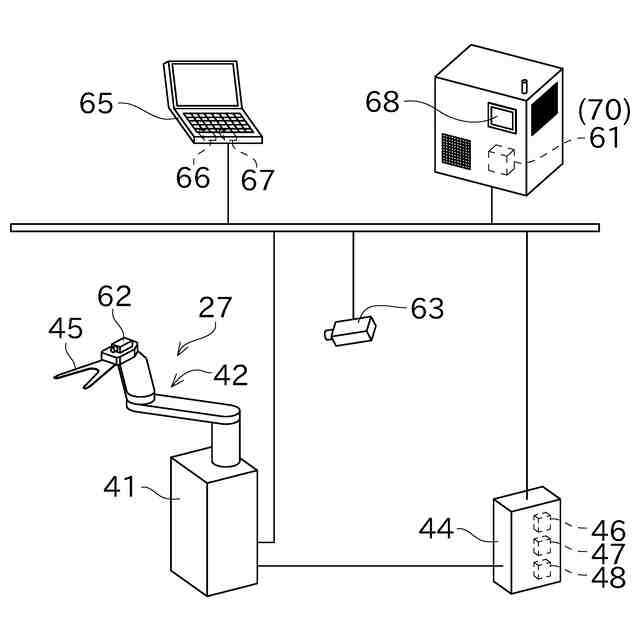
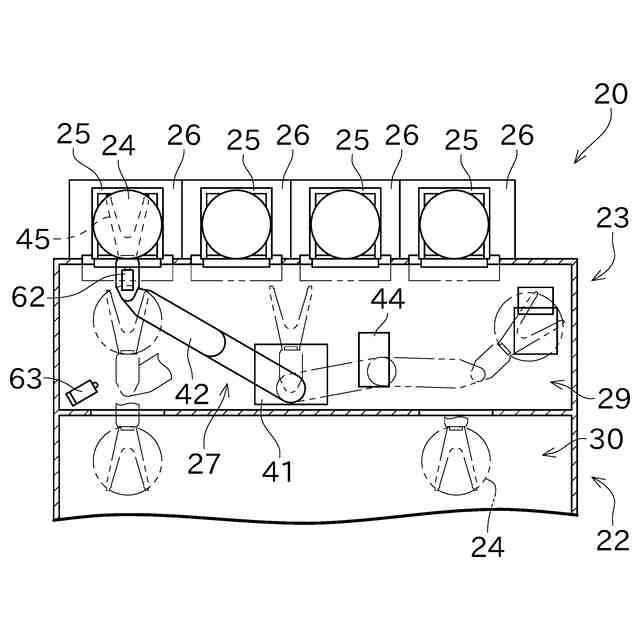
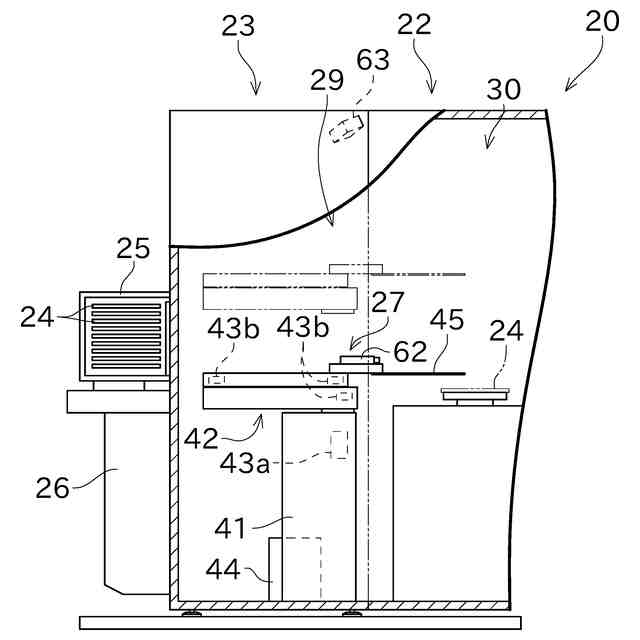
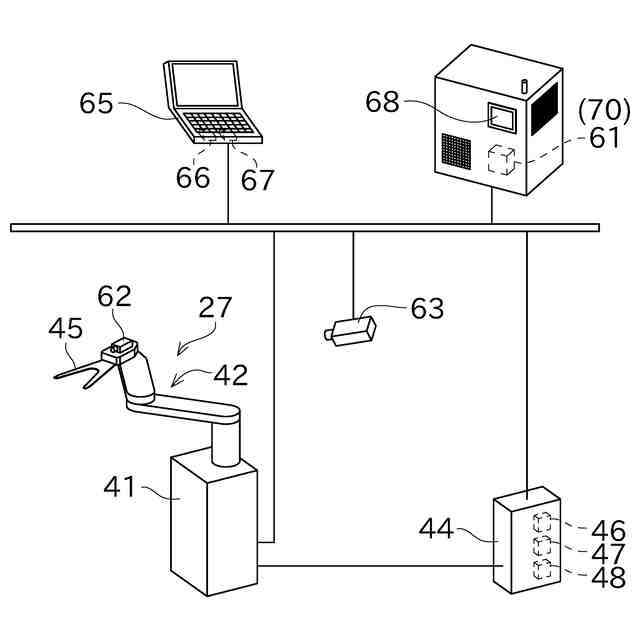
【解決手段】基板搬送システムは、ロボットと、カメラと、ディスプレイと、を備える。ロボットは、基板を保持して搬送する。カメラは、ロボットが保持する基板を撮影する。ディスプレイは、カメラにより取得された映像を表示する。ロボットは、ロボットアームと、ロボットハンドと、を有する。ロボットアームは、複数のリンク体を含む。ロボットハンドは、複数のリンク体の一つに固定され、基板を保持する。カメラは、ロボットハンドが固定されたリンク体に固定されていて、ロボットハンドの方を向いている。
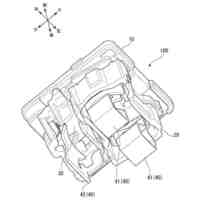
【選択図】図3
特許請求の範囲
【請求項1】
基板を保持して搬送するロボットと、
前記ロボットが保持する前記基板を撮影するカメラと、
前記カメラにより取得された映像を表示するディスプレイと、
を備え、
前記ロボットは、
複数のリンク体を含むロボットアームと、
前記複数のリンク体の一つに固定され、前記基板を保持するロボットハンドと、
を有し、
前記カメラは、前記ロボットハンドが固定された前記リンク体に固定されていて、前記ロボットハンドの方を向いている、基板搬送システム。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の基板搬送システムであって、
前記カメラは、動画を撮影する機能を備え、かつ前記ロボットが保持する前記基板の上面の全体を撮影するように構成される、基板搬送システム。
【請求項3】
請求項1又は2に記載の基板搬送システムであって、
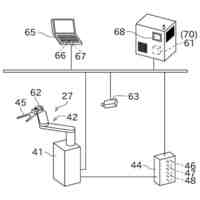
情報を記憶可能な記憶部と、
前記記憶部の記憶内容に基づく情報を出力する演算部と、
を更に備え、
前記記憶部は、
前記ロボットのコントローラから受信した、前記複数のリンク体を駆動する電動モータの位置の情報と、
前記カメラにより取得され、前記基板の状態を示すように構成される映像の情報と、
を記憶し、
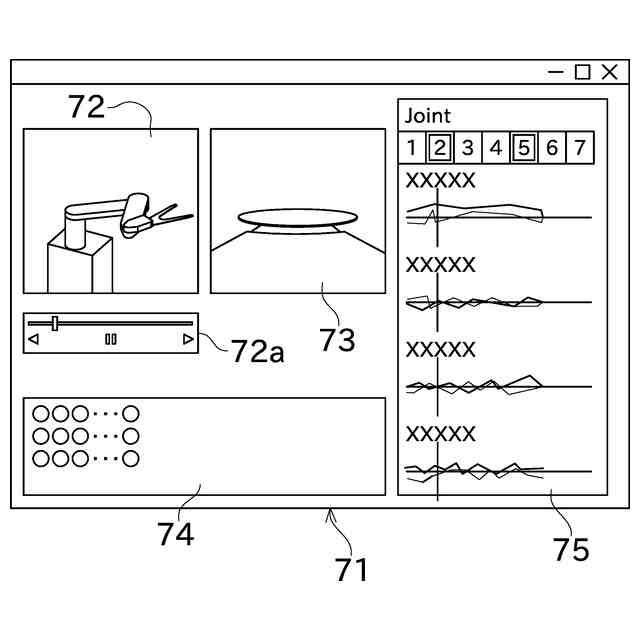
前記演算部は、前記ディスプレイに、
前記ロボットの姿勢を再現する2次元又は3次元のモデルが、コンピュータグラフィックスによって表示されるモデル領域と、
前記基板の状態を示すように構成される映像が表示される映像領域と、
を並べて表示させる、基板搬送システム。
【請求項4】
請求項3に記載の基板搬送システムであって、
前記モデル領域に表示される前記モデルに対応する時刻と、前記映像領域に表示される映像に対応する時刻が、同期している、基板搬送システム。
【請求項5】
請求項4に記載の基板搬送システムであって、
前記演算部は、前記モデル領域に表示される前記モデルに対応する時刻、及び、前記映像領域に表示される映像に対応する時刻を指定するための共通のシークバーを表示させる、基板搬送システム。
【請求項6】
請求項3から5までの何れか一項に記載の基板搬送システムであって、
前記演算部は、前記ディスプレイに、少なくとも前記電動モータの位置の情報がグラフによって表示されるグラフ領域を、前記モデル領域及び前記映像領域と並べて表示させる、基板搬送システム。
【請求項7】
請求項6に記載の基板搬送システムであって、
前記演算部は、前記グラフ領域の前記グラフにおいて、前記モデル領域に表示される前記モデルに対応する時刻、及び、前記映像領域に表示される映像に対応する時刻の少なくとも何れかに対応する位置に時刻図形を表示させる、基板搬送システム。
【請求項8】
請求項7に記載の基板搬送システムであって、
前記モデル領域及び前記映像領域の表示対象の情報は、互いに同期した状態で再生可能であり、
前記グラフ領域では、前記時刻図形が、前記表示対象の情報の再生に同期して移動する、基板搬送システム。
【請求項9】
基板を保持して搬送するロボットと、
前記ロボットが保持する前記基板を撮影するカメラと、
を備え、
前記ロボットは、
複数のリンク体を含むロボットアームと、
前記複数のリンク体の一つに固定され、前記基板を保持するロボットハンドと、
を有し、
前記カメラは、前記ロボットハンドが固定された前記リンク体に固定されている、基板搬送システムにおける基板搬送方法であって、
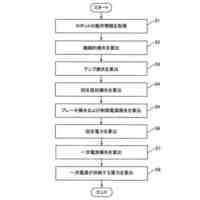
前記ロボットハンドで前記基板を保持して搬送しながら、前記カメラによって、映像に前記基板が含まれるように前記ロボットハンドを撮影する撮影工程と、
前記撮影工程で得られた映像をディスプレイに表示する表示工程と、
を備える、基板搬送方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、基板搬送システム及び基板搬送方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来から、例えば、ウエハ等の基板を搬送するためにロボットが用いられている。特許文献1のロボットは、ロボットの動きを制御するためのコントローラを備えている。
【先行技術文献】
【特許文献】
【0003】
特開2008-28134号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ロボットは、様々な原因でエラーを発生することがある。この場合、発生するエラーに応じてメンテナンス作業を行う必要がある。ウエハ処理設備等においては、高いレベルの情報管理を実現するため、別の場所へのデータの持出しや、外部ネットワークとの通信が制限される場合も多い。このような状況において、ロボットのエラーの原因を素早く特定して解消できることが求められている。
【0005】
本発明は以上の事情に鑑みてされたものであり、その目的は、例えばロボットのエラー発生時において、作業者が状況を素早く良好に把握可能とすることにある。
【課題を解決するための手段】
【0006】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0007】
本発明の第1の観点によれば、以下の構成の基板搬送システムが提供される。即ち、この基板搬送システムは、ロボットと、カメラと、ディスプレイと、を備える。前記ロボットは、基板を保持して搬送する。前記カメラは、前記ロボットが保持する前記基板を撮影する。前記ディスプレイは、前記カメラにより取得された映像を表示する。前記ロボットは、ロボットアームと、ロボットハンドと、を有する。前記ロボットアームは、複数のリンク体を含む。前記ロボットハンドは、前記複数のリンク体の一つに固定され、前記基板を保持する。前記カメラは、前記ロボットハンドが固定された前記リンク体に固定されていて、前記ロボットハンドの方を向いている。
【0008】
本発明の第2の観点によれば、以下のような基板搬送方法が提供される。即ち、この基板搬送方法は、基板搬送システムにおける基板搬送方法である。前記基板搬送システムは、ロボットと、カメラと、を備える。前記ロボットは、基板を保持して搬送する。前記カメラは、前記ロボットが保持する前記基板を撮影する。前記ロボットは、ロボットアームと、ロボットハンドと、を有する。前記ロボットアームは、複数のリンク体を含む。前記ロボットハンドは、前記複数のリンク体の一つに固定され、前記基板を保持する。前記カメラは、前記ロボットハンドが固定された前記リンク体に固定されている。前記基板搬送方法は、撮影工程と、表示工程と、を備える。前記撮影工程では、前記ロボットハンドで前記基板を保持して搬送しながら、前記カメラによって、映像に前記基板が含まれるように前記ロボットハンドを撮影する。前記表示工程では、前記撮影工程で得られた映像をディスプレイに表示する。
【0009】
これにより、例えばロボットのエラー発生時において、作業者が状況を素早く良好に把握することができる。従って、作業者は状況に対して、円滑かつ的確に対処することができる。
【発明の効果】
【0010】
本発明によれば、例えばロボットのエラー発生時において、作業者が状況を素早く良好に把握することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
液化ガス貯蔵タンク
1日前
川崎重工業株式会社
供給電力算出方法、プログラムおよび供給電力算出装置
1日前
川崎重工業株式会社
基板搬送システム及び基板搬送方法
1日前
川崎重工業株式会社
ロボットシステム及びその運転方法
2日前
個人
電波吸収体
8日前
個人
テーブルタップ
5日前
株式会社東光高岳
開閉器
16日前
キヤノン株式会社
電子機器
5日前
株式会社ヨコオ
同軸コネクタ
1日前
株式会社GSユアサ
蓄電装置
5日前
古河電池株式会社
制御弁式鉛蓄電池
1日前
株式会社ダイヘン
碍子
10日前
株式会社GSユアサ
蓄電装置
5日前
株式会社ユーシン
スイッチ装置
5日前
株式会社ユーシン
スイッチ装置
5日前
個人
六角形パネル展開アレーアンテナ
5日前
イビデン株式会社
プリント配線板
16日前
イビデン株式会社
プリント配線板
8日前
ローム株式会社
半導体装置
5日前
TDK株式会社
コイル部品
1日前
住友電装株式会社
コネクタ
1日前
株式会社村田製作所
二次電池
8日前
日産自動車株式会社
電子機器
8日前
日本圧着端子製造株式会社
コネクタ
9日前
富士電機株式会社
半導体装置
16日前
富士電機株式会社
半導体装置
5日前
ニチコン株式会社
コンデンサ
1日前
大和電器株式会社
コンセント
1日前
太陽誘電株式会社
コイル部品
5日前
株式会社デンソー
半導体装置
5日前
株式会社デンソー
半導体装置
5日前
オムロン株式会社
リード線整列治具
5日前
富士電機株式会社
半導体装置
16日前
個人
アウトドア用のソケットとプラグ
16日前
TDK株式会社
電子部品
1日前
株式会社ダイフク
搬送車
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ