TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025013375
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2024190217,2022056691
出願日
2024-10-30,2014-03-14
発明の名称
外科的ロボットデバイス
出願人
ボード オブ リージェンツ オブ ザ ユニバーシティ オブ ネブラスカ
代理人
個人
,
個人
,
個人
主分類
A61B
34/30 20160101AFI20250117BHJP(医学または獣医学;衛生学)
要約
【課題】改善された最小侵襲的な外科手術用のロボットシステムを提供する。
【解決手段】
患者において外科的処置を実施するための外科的ロボットシステムであって、その外科的ロボットシステムは、患者の腔内に配置されるサイズのロボットデバイスと、そのロボットデバイスと電気通信するコンソールとを含む。コンソールはロボットデバイスを患者の外部からコントロールするように構成される。
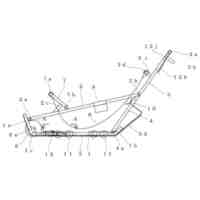
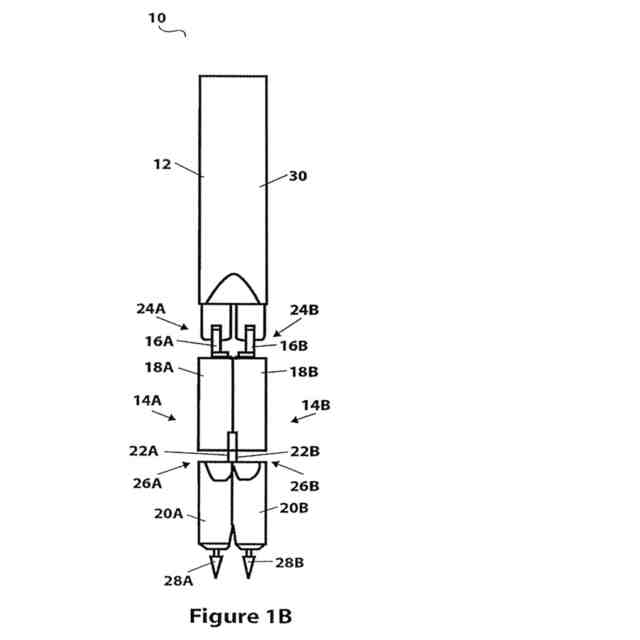
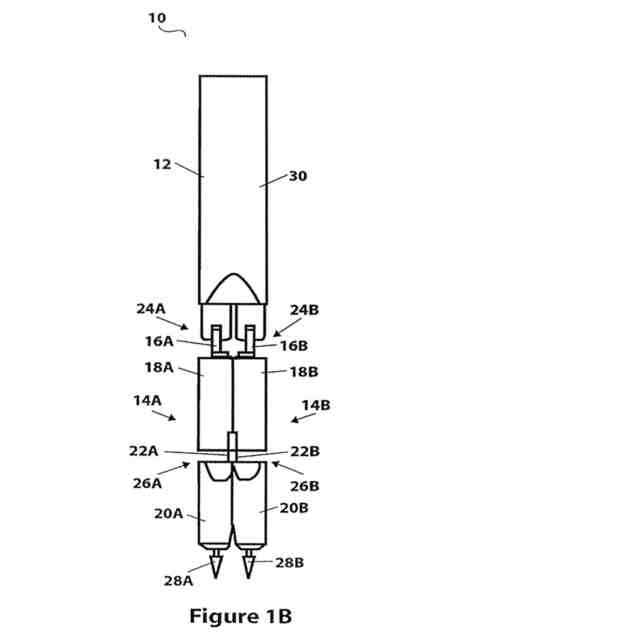
【選択図】図1B
特許請求の範囲
【請求項1】
患者において外科的処置を実施するための外科的ロボットシステムであって、その外科的ロボットシステムは、
a.前記患者の腔内に配置されるサイズのロボットデバイスを含み、
前記ロボットデバイスは、以下のiからvの要件を含み、
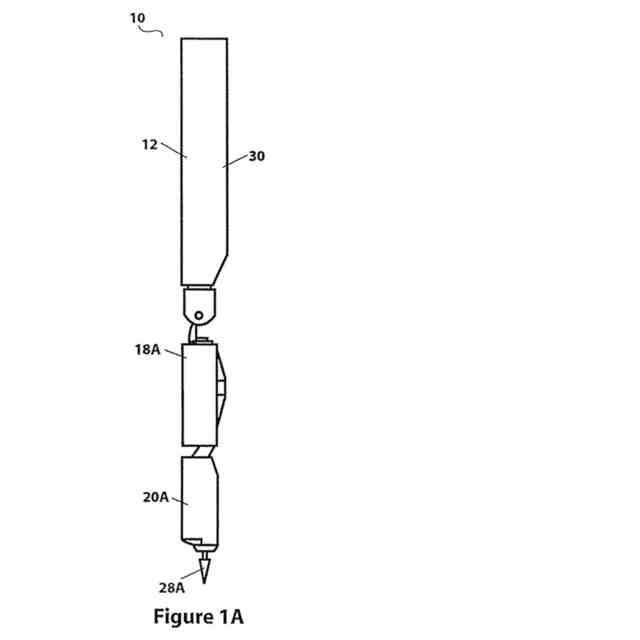
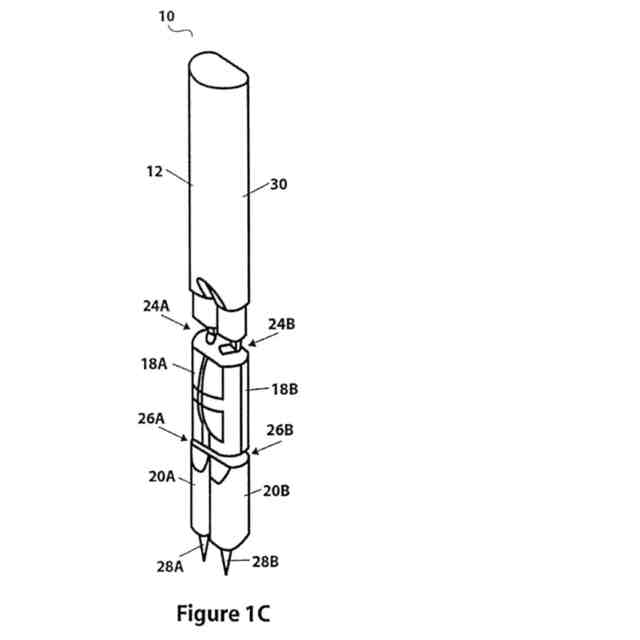
i.デバイス本体(12)、
ii.前記デバイス本体(12)の遠位端と可動に連結される第一の肩関節(24A)、
iii.前記デバイス本体(12)の前記遠位端と可動に連結される第二の肩関節(24B)、
iv.前記第一の肩関節(24A)に操作的に連結され、以下を含む、第一の可動のセグメント化されたロボットアーム(14A)、
A.複数の第一の上腕アクチュエーター(120)を包含するハウジングを含む第一の上腕(18A)、
B.少なくとも1つの第一の前腕アクチュエーター(180)を包含するハウジング(260)を含む第一の前腕(20A)、
C.複数の第一の原動歯車(122、182)および被動歯車(126、184)であって、前記第一の上腕アクチュエーター(120)および/または前記第一の前腕アクチュエーター(180)からの回転運動を、前記第一の可動のセグメント化されたロボットアーム(14A)の運動に変換するように構成および配置されること、および、
D.第一の操作コンポーネント(28A)、
v.前記第二の肩関節(24B)に操作的に連結され、以下を含む、第二の可動のセグメント化されたロボットアーム(14B)、
A.複数の第二の上腕アクチュエーター(120)を包含するハウジングを含む第二の上腕(18B)、
B.少なくとも1つの第二の前腕アクチュエーター(180)を包含するハウジング(260)を含む第二の前腕(20B)、
C.複数の第二の原動歯車(122、182)および被動歯車(126、184)であって、前記第二の上腕アクチュエーター(120)および/または前記第二の前腕アクチュエーター(180)からの回転運動を、前記第二の可動のセグメント化されたロボットアーム(14B)の運動に変換するように構成および配置されること、および、
D.第二の操作コンポーネント(28B)、
前記外科的ロボットシステムはさらに、
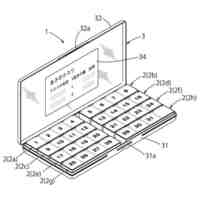
b.前記ロボットデバイスと電気通信するコンソールを含み、前記コンソールは前記ロボットデバイスを前記患者の外部からコントロールするために構成され、
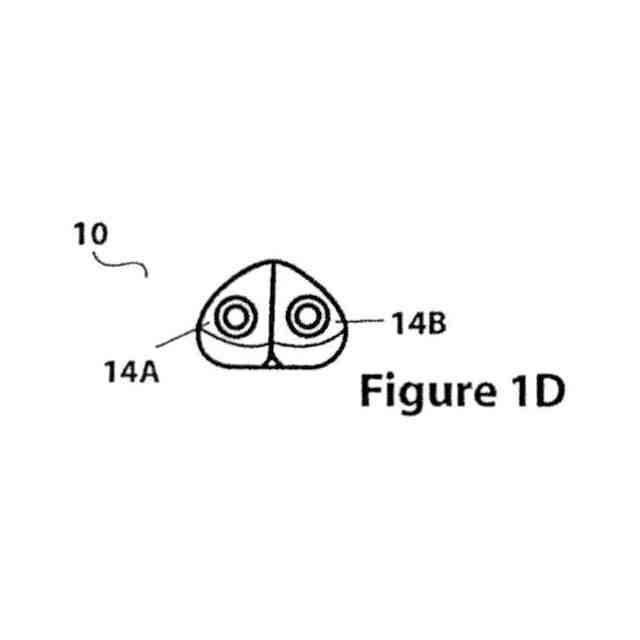
前記第一および第二の可動のセグメント化されたロボットアーム(14A、14B)は、前記ロボットデバイスの前記腔への挿入を容易にするために、前記ロボットアーム(14A、14B)の断面形状が前記デバイス本体(12)の断面形状と整合するように、実質的に真っ直ぐな構成で配置されることが可能である、外科的ロボットシステム。
続きを表示(約 1,300 文字)
【請求項2】
前記第一の前腕、第二の前腕、第一の上腕および第二の上腕アクチュエーター(120、180)はそれぞれブラシレスDCモーターである請求項1に記載の外科的ロボットシステム。
【請求項3】
前記デバイス本体(12)内に配置され、前記第一の前腕、第二の前腕、第一の上腕および第二の上腕アクチュエーター(120、180)の内の少なくとも一つと操作的に通信するリジッド-フレックスPCBをさらに含む請求項1に記載の外科的ロボットシステム。
【請求項4】
前記第一の可動のセグメント化されたロボットアーム(14A)は第一の肘関節(22A)をさらに含み、前記第一の上腕(18A)は、前記第一の肩関節(24A)に対して、ロール、ピッチ、および、ヨーが可能なように構成され、および、前記第一の前腕(20A)は、前記第一の肘関節(22A)を経由して前記第一の上腕(18A)に対してヨーが可能なように構成される請求項3に記載の外科的ロボットシステム。
【請求項5】
前記第一の操作コンポーネントは、把持コンポーネント、焼灼コンポーネント、縫合コンポーネント、イメージングコンポーネント、灌漑コンポーネント、吸引コンポーネント、操作アームコンポーネント、センサーコンポーネント、および、照明コンポーネントからなる群から選択される請求項1に記載の外科的ロボットシステム。
【請求項6】
前記第二の操作コンポーネントは、把持コンポーネント、焼灼コンポーネント、縫合コンポーネント、イメージングコンポーネント、灌漑コンポーネント、吸引コンポーネント、操作アームコンポーネント、センサーコンポーネント、および、照明コンポーネントからなる群から選択される請求項5に記載の外科的ロボットシステム。
【請求項7】
前記の第一および第二の前腕(20A,20B)は、前記第一および第二の操作コンポーネントのクイックチェンジを可能とするように構成および配置される請求項1に記載の外科的ロボットシステム。
【請求項8】
前記第一および第二の可動のセグメント化されたロボットアーム(14A,14B)は、並行して挿入されるように構成および配置される請求項1に記載の外科的ロボットシステム。
【請求項9】
前記デバイス本体(12)は、その遠位端が前記患者の前記腔内にあるとともに、前記デバイス本体(12)の少なくとも一部が前記腔外にあるように、該腔内に配置されるように構成されており、さらに、前記デバイス本体(12)は、前記患者内で最初の挿入位置に対し回転される、および/または、傾けられるように構成および配置される請求項8に記載の外科的ロボットシステム。
【請求項10】
前記第一および第二の可動のセグメント化されたロボットアーム(14A,14B)は、前記第一および第二の前腕(20A,20B)および第一および第二の上腕(18A,18B)が、前記デバイス本体(12)に対して実質的に垂直に方向づけられるように構成および配置される請求項1に記載の外科的ロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
[関連出願の相互参照]
本出願は、2013年3月15日に出願され、「Single Site Robotic Surgical Devices,Systems and Methods」と題された、米国仮出願61/792,508からの優先権を主張するものであり、それは、その全体で参照により本明細書中に援用される。[技術分野]
本明細書に開示される実施態様は、様々な医療用デバイスおよび関連するコンポーネント(ロボットおよび/またはインビボの医療用デバイスおよび関連するコンポーネントを含む)に関する。特定の実施態様は、様々なロボット医療用デバイス(体腔内に置かれるロボットデバイス、および、体腔内のオリフィスまたは開口部を通して置かれる支持コンポーネントを用いて配置されるロボットデバイスを含む)を含む。さらなる実施態様は、上記デバイスを操作する方法に関する。
続きを表示(約 5,900 文字)
【背景技術】
【0002】
侵襲性の外科的手順は、様々な医学的状態を対処するために必須である。可能な場合は、腹腔鏡検査のような最小侵襲的な手順が好ましい。
しかしながら、腹腔鏡検査のような公知の最小侵襲的な技術は、1)アクセスポートを通して挿入される固い道具の使用により生じる可動性制限、および、2)制限された視覚フィードバックに、一部起因して、範囲および複雑性が制限される。da Vinci(登録商標)Surgical System(カリフォルニア州サニーベールにあるIntuitive Surgical,Inc.より入手可能)のような公知のロボットシステムもまた、アクセスポートにより制限され、そして、非常に大きくて、非常に高価で、ほとんどの病院で利用できず、および、感覚および運動の能力が制限されるという、さらなる不都合を有する。
【先行技術文献】
【特許文献】
【0003】
国際特許出願公開第2013/009887号明細書
米国特許出願公開第2009/0163929号明細書
米国特許出願公開第2010/0069940号明細書
米国特許出願公開第2005/0096502号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
改善された外科的方法、システム、およびデバイスに関する当分野での必要性が存在する。
【課題を解決するための手段】
【0005】
本明細書に開示される様々なシステムおよびデバイスは、医療の手順およびシステムでの使用のためのデバイスに関する。より具体的には、様々な実施態様は、ロボットデバイスを含む様々な医療用デバイス、および、関連する方法およびシステムに関する。特定の実施は、単孔式腹腔鏡(LESS)の外科的手順での使用のための、そのようなデバイスに関する。
【図面の簡単な説明】
【0006】
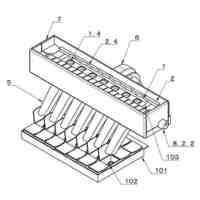
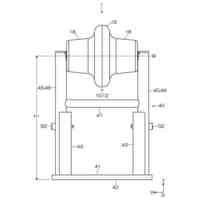
一実施態様に係るロボット外科的デバイスの側面図である。
図1のデバイスの正面斜視図である。
図1のデバイスの斜視図である。
図1のデバイスの端面図である。
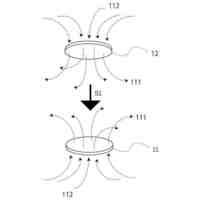
一実施態様に係るロボット医療用デバイスの内部本体および肩の切断図である。
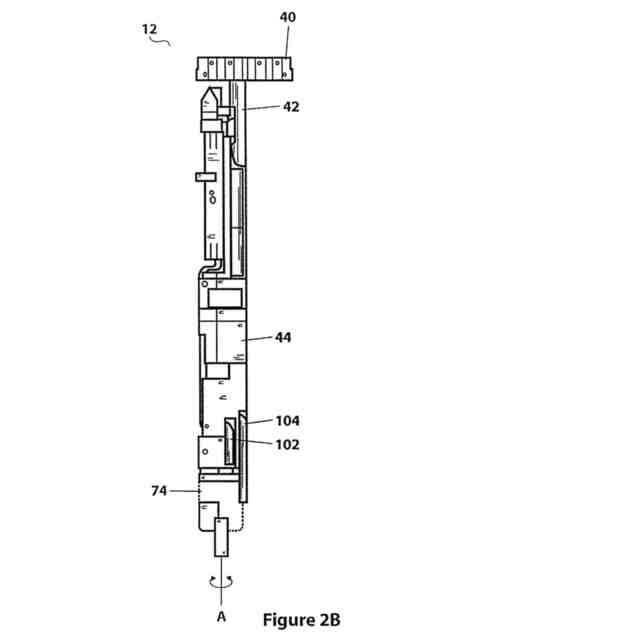
図2Aのロボット医療用デバイスの回転した切断図である。
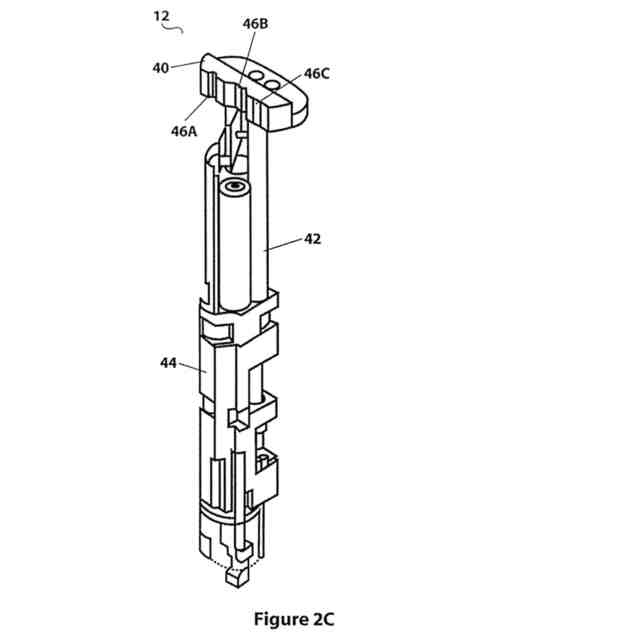
図2Aの実施態様に係る医療用デバイスの切断斜視図である。
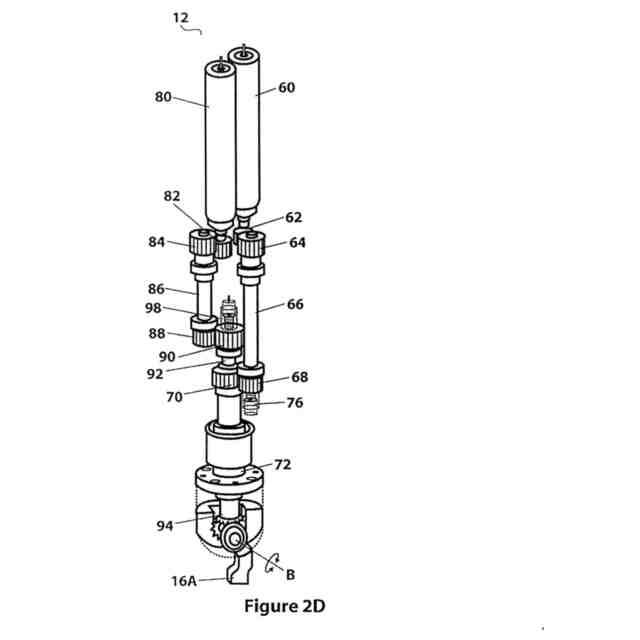
図2Aの実施態様に係る医療用デバイス本体のさらなる切断斜視図である。
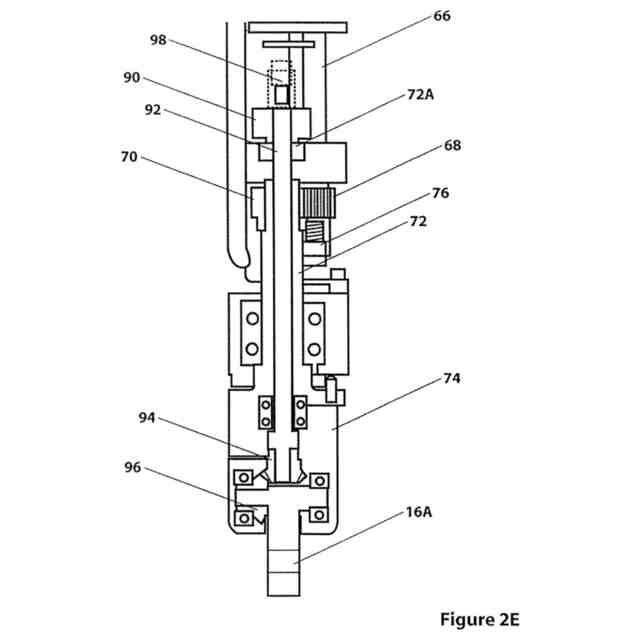
図2Aの実施態様に係るロボットデバイスの下部本体および肩の切断図である。
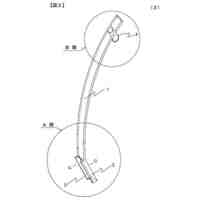
一実施態様に係るロボット医療用デバイスの上腕の切断側面図である。
図3Aの実施態様の斜視図である。
図3Aの実施態様の異なる斜視図である。
図3Aの実施態様の背面斜視図である。
図3Dに示した医療用デバイスの別の斜視図である。
一実施態様に係るロボットデバイスの右上腕の内部コンポーネントの切断図である。
図4Aの実施態様の回転した側面図である。
図4Aの実施態様のさらに回転した側面図である。
図4Aの実施態様のエンドロング図(endlong view)である。
図4Aの実施態様のさらなるエンドロング図である。
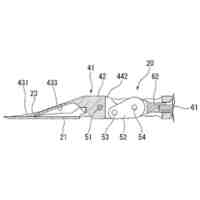
一実施態様に係るロボットデバイスの前腕のエンドロング図である。
ラインA-Aに沿った、図5Aの実施態様の前腕の内部コンポーネントの切断側面図である。
ラインB-Bに沿った、図5Aの実施態様の前腕の内部コンポーネントの切断側面図である。
例示的な実施態様に係る、電気部分を示す前腕(forearm)の末端エフェクター部分の断面図である。
図6Aの実施態様に対する、前腕の補完(complimentary)部分の外観図の上面斜視図である。
一実施態様に係るロボットデバイスの前腕の内部コンポーネントの底面概略斜視図である。
ラインA-Aに沿った、図5Aの実施態様の前腕の内部コンポーネントの切断側面図であり、電気コンポーネントをさらに詳しくする。
図8Aの実施態様のC-C断面の接近図である。
一実施態様に係る前腕の外部の斜視図である。
図9Aの実施態様の斜視の内部図である。
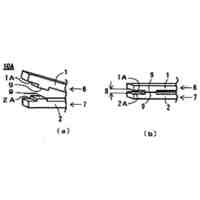
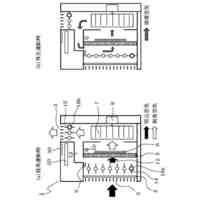
内側流体シールを含むロボットデバイスの一実施態様の斜視図である。
さらなる外側流体シールをさらに含む、図10Aの実施態様の斜視図である。
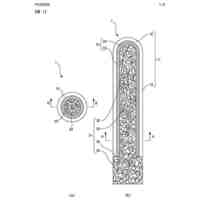
デバイスの前腕内のリジッド-フレックスPCBコンポーネントの一実施態様の側面切断図である。
図11Aの実施態様のさらなる斜視図である。
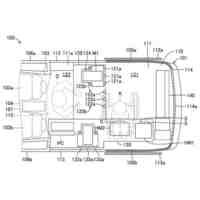
一実施態様に係る、挿入中のロボットデバイスの上面図を示す。
図12Aのデバイスの正面図である。
図12Aのデバイスの側面図である。
図12Aのデバイスの斜視図である。
一実施態様に係る、挿入中のロボットデバイスの上面図を示す。
図13Aのデバイスの正面図である。
図13Aのデバイスの側面図である。
図13Aのデバイスの斜視図である。
一実施態様に係る、挿入中のロボットデバイスの上面図を示す。
図14Aのデバイスの正面図である。
図14Aのデバイスの側面図である。
図14Aのデバイスの斜視図である。
一実施態様に係る、挿入中のロボットデバイスの上面図を示す。
図15Aのデバイスの正面図である。
図15Aのデバイスの側面図である。
図15Aのデバイスの斜視図である。
一実施態様に係る、挿入中のロボットデバイスの上面図を示す。
図16Aのデバイスの正面図である。
図16Aのデバイスの側面図である。
図16Aのデバイスの斜視図である。
一実施態様に係る、挿入中のロボットデバイスの上面図を示す。
図17Aのデバイスの正面図である。
図17Aのデバイスの側面図である。
図17Aのデバイスの斜視図である。
【発明を実施するための形態】
【0007】
本明細書に開示される、ロボットデバイスおよび関連する方法およびシステムの様々な実施態様は、任意の他の公知の医療用デバイス、システム、および方法に組み込むことができ、またはこれらとともに用いることができることが理解される。本明細書に開示される、ロボットデバイスおよび関連する方法およびシステムの様々な実施態様は、任意の他の公知の医療用デバイス、システム、および方法に組み込むことができ、またはこれらとともに用いることができることが理解される。例えば、本明細書に開示される様々な実施態様は、同時係属の米国出願11/766,683(2007年6月21日に出願された、表題「Magnetically Coupleable Robotic Devices and Related Methods」)、11/766,720(2007年6月21日に出願された、表題「Magnetically Coupleable Surgical Robotic Devices and Related Methods」)、11/966,741(2007年12月28日に出願された、表題「Methods,Systems,and Devices for Surgical Visualization and Device Manipulation」)、61/030,588(2008年2月22日に出願)、12/192,663(2008年8月15日に出願された、表題「Medical Inflation,Attachment,and Delivery Devices and Related Methods」)、12/192,779(2008年8月15日に出願された、表題「Modular and Cooperative Medical Devices and Related Systems and Methods」)、61/640,879(2012年5月1日に出願)、13/493,725(2012年6月11日に出願された、表題「Methods,Systems,and Devices Relating to Surgical End Effectors」)、13/546,831(2012年7月11日に出願された、表題「Robotic Surgical Devices,Systems,and Related Methods」)、61/680,809(2012年8月8日に出願)、13/573,849(2012年10月9日に出願された、表題「Robotic Surgical Devices,Systems,and Related Methods」)、および、13/738,706(2013年1月10日に出願された、表題「Methods,Systems,and Devices for Surgical Access and Insertion」)、および、米国特許第7,492,116号(2007年4月3日に出願された、表題「Robot for Surgical Applications」)、7,772,796(2007年11月29日に出願された、表題「Robot for Surgical Applications」)、8,179,073(2012年5月15日に発行された、表題「Robotic Devices with Agent Delivery Components and Related Methods」)、8,343,171(2008年7月11日に出願された、表題「Methods and Systems of Actuation in Robotic Devices」)、および、8,679,096(2008年11月26日に出願された、表題「Multifunctional Operational Component for Robotic Devices」)に開示される任意の医療用デバイスおよびシステムに取り込まれてよく、またはそれらとともに用いられてよく、それらの全てが、それらの全体で参照により本明細書中に援用される。
【0008】
上記に挙げた出願に開示される特定のデバイスおよびシステムの実施は、本明細書に開示されるものと同様の支持コンポーネンと組み合わせて、患者の体腔内に配置することができる。本明細書において用いられる「インビボのデバイス」は、患者の体腔内に配置されている間、少なくとも部分的に、ユーザーにより、配置、操作、またはコントロールすることができる、任意のデバイスを意味し、支持コンポーネント(例えば、ロッド、または、体腔の開口部またはオリフィスを通って置かれる他のそのようなコンポーネント)に連結される任意のデバイスを含み、また、実質的に、患者の体腔の壁に対して、または、隣接して、配置される任意のデバイスも含み、さらに、内部作動される(原動力の外部源を有さない)任意のそのようなデバイスを含み、加えて、外科的手順中に腹腔鏡下または内視鏡的に用いられ得る任意のデバイスを含む。本明細書において用いられる用語「ロボット」および「ロボットデバイス」は、前に説明したように、外部のコンソールまたはコントロールシステムからのコマンドに応答して、または自動的のいずれかで、タスクを行なうことのできる任意のデバイスを指す。
【0009】
特定の実施態様は、空洞の十分な通気を維持しながら、空洞内への本発明の挿入を提供する。さらなる実施態様は、挿入プロセス中に、外科医または外科的ユーザーの本発明との物理的接触を最小限化する。他の実施は、患者および本発明に関する挿入プロセスの安全性を高める。例えば、一部の実施態様は、システム/デバイスと患者との間に、有害な接触が生じないことを保証するために、患者の空洞内へ挿入される際に本発明の視覚化を提供する。加えて、特定の実施態様は、切り込みのサイズ/長さの最小限化を可能にする。さらなる実施は、アクセス/挿入の手順、および/または、手順に要するステップの、複雑性を低減させる。他の実施態様は、最小の輪郭、最小のサイズを有し、または、一般に取り扱いおよび使用の簡易性を高めるために機能および外観が最低限である、デバイスに関する。
【0010】
本明細書に開示される特定の実施は、様々な構造に組み立てることのできる、「コンビネーション」または「モジュール」の医療用デバイスに関する。本適用の目的に関し、「コンビネーションデバイス」および「モジュールデバイス」は両方とも、様々な異なる構造に並べることのできるモジュールまたは交換可能なコンポーネントを有する、任意の医療用デバイスを意味する。また、本明細書に開示されるモジュールコンポーネントおよびコンビネーションデバイスは、セグメント化された三角形または四角形の形をしたコンビネーションデバイスも含む。三角形または四角形の構造を形成するために連結されるモジュールコンポーネント(本明細書において「セグメント」とも呼ぶ)で作り上げられるこれらのデバイスは、より大きなコンポーネントまたはより多くの操作コンポーネントに用いることのできる、デバイス内の実質的なペイロード空間も提供しながら、使用中、てこ作用(leverage)および/または安定性を提供することができる。上記に開示および記述される様々なコンビネーションデバイスと同様に、一実施態様によれば、これらの三角形または四角形のデバイスは、上記に記述および開示されるこれらのデバイスと同様の方法で、患者の体腔内部に配置することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
歯の掃除具
3か月前
個人
歯茎みが品
16日前
個人
錠剤撒き器
5か月前
個人
乗馬テラピー
3か月前
個人
塗り薬塗り具
2か月前
個人
導電香
9日前
個人
身体牽引装置
3か月前
個人
マッサージ機
3日前
個人
発熱器具
3か月前
個人
片足歩行支援具
24日前
個人
収納容器
1か月前
個人
健康器具
2か月前
個人
染毛方法
2か月前
個人
クリップ
23日前
個人
鼻腔拡張具
5か月前
個人
挟圧手工爪矯正具
5か月前
個人
眼科診療車
1か月前
株式会社コロナ
脱臭機
5か月前
個人
磁器治療器
3か月前
個人
動体視力強化装置
3か月前
株式会社ナカニシ
生検針
3か月前
個人
血管硬化度算出方法
4か月前
株式会社コーセー
化粧料
24日前
東レ株式会社
吸収制御剤
2か月前
個人
避難困難者救出台車
1か月前
株式会社 MTG
浴用剤
10日前
株式会社コーセー
美爪料
24日前
個人
口腔ケア用歯ブラシ
5か月前
個人
除菌システム
24日前
東レ株式会社
下肢着用具
3か月前
株式会社ファンケル
化粧料
4か月前
個人
立位姿勢支持具
2か月前
株式会社ニデック
眼科装置
4か月前
株式会社ニデック
眼科装置
5か月前
株式会社ニデック
眼科装置
3か月前
株式会社ファンケル
化粧料
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ