TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025013320
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2024112961
出願日
2024-07-12
発明の名称
作業機械のアームレストの位置を特定するための方法及びアームレスト
出願人
ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング
,
ROBERT BOSCH GMBH
代理人
アインゼル・フェリックス=ラインハルト
,
個人
,
個人
,
個人
,
個人
主分類
E02F
9/20 20060101AFI20250117BHJP(水工;基礎;土砂の移送)
要約
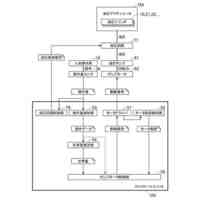
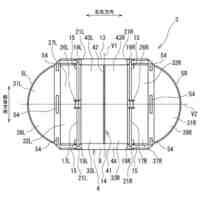
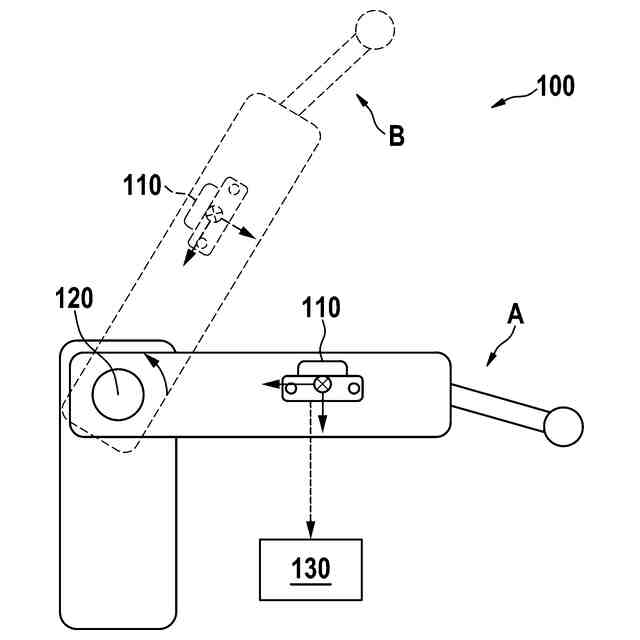
【課題】本発明は、作業機械の制御台における座席のアームレスト(100,200)の位置(A,B)を特定するための方法(300)に関する。
【解決手段】本方法は、少なくとも1つの慣性センサ(110,112)を用いて加速度及び/又は回転速度を特定すること(310)と、特定された加速度又は回転速度に基づいてアームレスト(100,200)の位置(A,B)を特定すること(320)と、を含む。さらに、このような方法(300)を実施するための計算ユニット及びコンピュータプログラム、アームレスト(100,200)、座席並びに作業機械が開示され、これらはそれぞれ、このような方法を実施するために使用可能である。
【選択図】図1
特許請求の範囲
【請求項1】
作業機械の制御台における座席のアームレスト(100,200)の位置(A,B)を特定するための方法(300)であって、
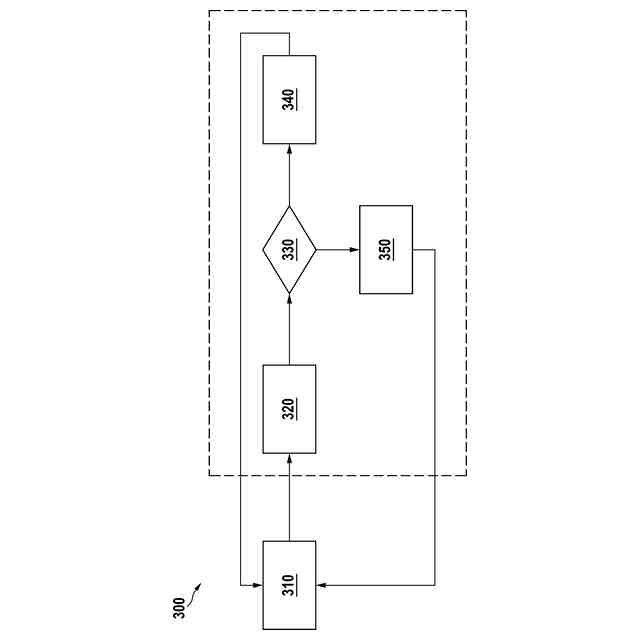
少なくとも1つの慣性センサ(110,112)を用いて加速度及び/又は回転速度を特定すること(310)と、
特定された前記加速度又は前記回転速度に基づいて前記アームレスト(100,200)の前記位置(A,B)を特定すること(320)と、
を含む方法(300)。
続きを表示(約 970 文字)
【請求項2】
前記アームレスト(100,200)の特定された前記位置(A,B)に依存して、機械機能(340,350)を制御することを含む、請求項1に記載の方法(300)。
【請求項3】
前記機械機能(340,350)を制御することは、エンジン始動(350)のイネーブル化(330)、及び/又は、前記作業機械の作業ユニットの駆動制御(340)のイネーブル化(330)を含む、請求項2に記載の方法(300)。
【請求項4】
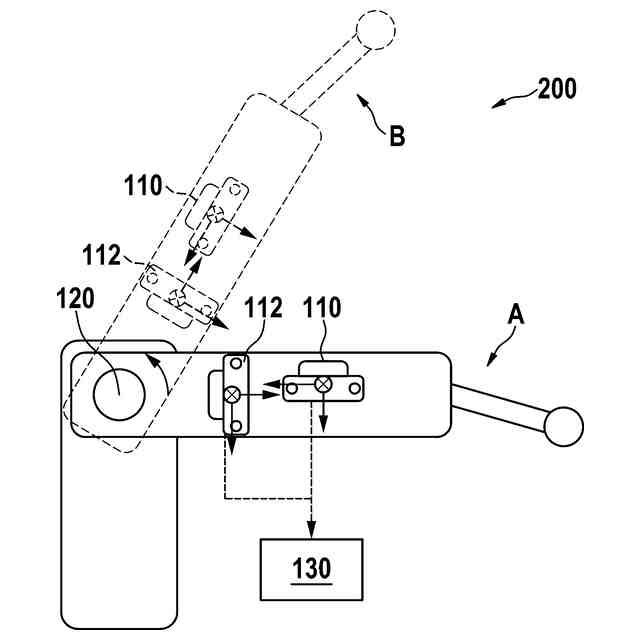
前記加速度及び/又は前記回転速度を特定すること(310)は、少なくとも2つの慣性センサ(110,112)を用いて行われる、請求項1乃至3のいずれか一項に記載の方法(300)。
【請求項5】
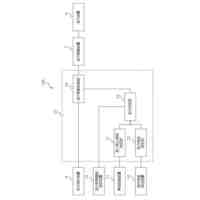
請求項1乃至4のいずれか一項に記載の方法(300)を実施するように構成されているプロセッサを含む計算ユニット(130)。
【請求項6】
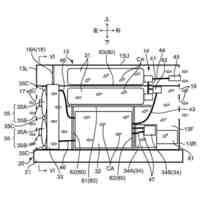
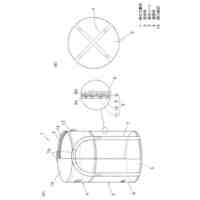
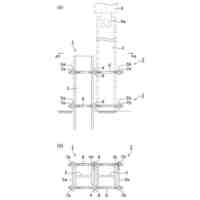
少なくとも1つの慣性センサ(110,112)、特に少なくとも2つの慣性センサを備える、作業機械の制御台の座席のためのアームレスト(100,200)であって、
前記少なくとも1つの慣性センサ(110,112)は、請求項1乃至4のいずれか一項に記載の方法(300)の実施を可能にするために、データを、請求項5に記載の計算ユニット(130)に送信するように構成されている、
アームレスト(100,200)。
【請求項7】
作業機械の制御台のための座席であって、
請求項6に記載の少なくとも1つのアームレスト(100,200)を有する座席。
【請求項8】
作業機械であって、
請求項7に記載の座席及び請求項5に記載の計算ユニット(130)を備えている作業機械。
【請求項9】
コンピュータプログラムであって、コンピュータによって前記プログラムが実行されるときに、前記コンピュータに、請求項1乃至4のいずれか一項に記載の方法(300)を実施させるための命令を含むコンピュータプログラム。
【請求項10】
コンピュータ可読データ担体であって、
請求項9に記載のコンピュータプログラムが格納されているコンピュータ可読データ担体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械の制御台における座席のアームレストの位置を特定するための方法、この方法を実施するための計算ユニット及びコンピュータプログラム、対応するアームレスト、作業機械のための座席並びに作業機械に関する。
続きを表示(約 2,000 文字)
【0002】
発明の背景
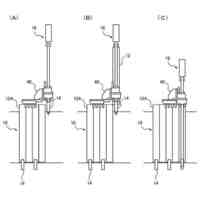
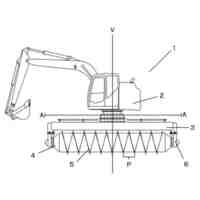
作業機械、たとえば掘削機は、可動の、リフト可能な、又は、上方へ畳むことが可能なアームレストを有することが多い。乗り込む際に、アームレストを上方へリフトさせることができる。このような状態においては、たとえば、エンジンを始動させることはできるが、安全上の理由から、作業機械(掘削機)を運動させることはできない。アームレストが下方へ畳まれる/リフトさせられると、機械機能(たとえば、ジョイスティック及び/又はフットペダル等を介した作業機械の動作)がイネーブル化される。アームレストがリフトさせられたこと/畳まれたことを、電気機械式スイッチによって検知することができる。このようなスイッチは、相応の安全規制(規範)を満たすために冗長的に設けられることがある。
【0003】
発明の開示
本発明によれば、独立請求項に記載の特徴を有する、作業機械の制御台における座席のアームレストの位置を特定するための方法、この方法を実施するための計算ユニット及びコンピュータプログラム、対応するアームレスト、作業機械のための座席並びに作業機械が提案される。有利な構成は、従属請求項及び以下の明細書の対象である。
【0004】
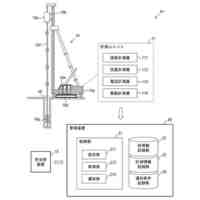
本発明においては、アームレストの位置を特定するために(ひいては、最終的に機械機能をイネーブル化するために)、従来の電気機械式スイッチを代替する又は補足する、特にマイクロエレクトロメカニカルシステム(MEMS)に基づく1つ又は複数の慣性センサ(慣性測定ユニット;英語ではinertial measurement unit(IMU))を使用する措置が用いられる。これによって、電気機械式スイッチに関連する問題(たとえば、所要の最小電流の複雑な提供、摩耗、スイッチング遷移時の未定義状態等)を回避することができる。
【0005】
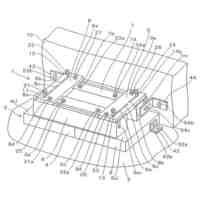
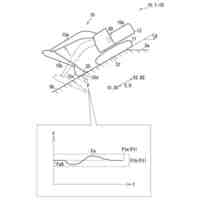
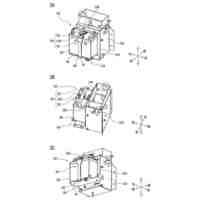
詳細には、作業機械の制御台における座席のアームレストの位置を特定するための本発明に係る方法は、少なくとも1つの慣性センサを用いて加速度及び/又は回転速度を特定することと、特定された加速度又は回転速度に基づいてアームレストの位置を特定することと、を含む。原則として摩耗及び最小電流を伴わない慣性測定ユニットを使用することによって、ひいては、アームレストの姿勢を一義的かつ確実に識別することによって、アームレストの位置又は姿勢の測定は、より簡単かつロバストになる。慣性センサの組込み位置は、アームレスト内で柔軟に選択可能である。
【0006】
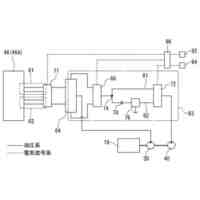
少なくとも1つの構成においては、この方法は、アームレストの特定された位置に依存して、機械機能を制御することをさらに含む。この場合、機械機能は、特に、エンジン始動のイネーブル化、及び/又は、作業機械の作業ユニットのイネーブル化を含み得る。したがって、この方法によって、安全規制(たとえば、特定の規範)を満たすことができる。なぜなら、作業機械(たとえば、掘削機)に関連する少なくともいくつかのこのような安全規制が、制御台におけるアームレストの位置に関連した機械機能のイネーブル化又はロックを要求するからである。
【0007】
方法の少なくとも1つの構成においては、加速度及び/又は回転速度を特定することを、少なくとも2つの慣性センサを用いて行うことができる。これによって、多くの使用場面において、安全上の理由から必要とされる、センサシステムの冗長性を実現することができる。
【0008】
本発明に係る計算ユニット、たとえば、作業機械の制御装置は、特にプログラミング技術によって、本発明に係る方法を実施するように構成されている。
【0009】
本発明に係る方法を、すべての方法ステップを実施するためのプログラムコードを備えたコンピュータプログラム又はコンピュータプログラム製品の形態において実装することも有利である。なぜなら、特に、実行する制御装置が他のタスクにも利用され、したがって、いずれにせよ存在している場合に、これによって生じるコストが特に少なくなるからである。コンピュータプログラムを提供するための適当なデータ担体は、特に磁気的な記憶手段、光学的な記憶手段及び電気的な記憶手段、たとえば、ハードディスク、フラッシュメモリ、EEPROM、DVD等である。コンピュータネットワーク(インターネット、イントラネット等)を介したプログラムのダウンロードも可能である。
【0010】
さらに、対応するアームレストと、作業機械のための座席及びこのような座席を備える作業機械(たとえば、掘削機、ホイールローダ、トラクタ、又は、特に液圧式に動作する作業装置を備えた別の作業機械)が提案される。これらは、本発明に係る方法の構成に関して、本明細書において説明された利点から有意義に相応に恩恵を受ける。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業機
16日前
鹿島建設株式会社
漂流物の捕捉構造
16日前
日立建機株式会社
作業機械
18日前
コベルコ建機株式会社
作業機械
20日前
ジーネットワーク株式会社
二重管CFT合成杭
3日前
日本車輌製造株式会社
アースドリル
10日前
日本植生株式会社
緑化土嚢袋
16日前
有限会社 櫂設計事務所
掘削・撹拌具
16日前
五洋建設株式会社
鋼管矢板の接合方法
2日前
日之出水道機器株式会社
地下構造物用蓋
16日前
コベルコ建機株式会社
作業機械
17日前
株式会社技研製作所
杭の定着方法
3日前
株式会社大林組
ベントナイト砕石の締固め管理方法
3日前
個人
ローラー転圧装置を備えた油圧ショベル
10日前
コベルコ建機株式会社
作業システム
16日前
井関農機株式会社
作業車両
17日前
株式会社宮本組
大深度掘削機の作業支援システム
9日前
コベルコ建機株式会社
建設機械
19日前
株式会社竹中土木
堤体補強構造
3日前
株式会社大林組
施工支援システム及び施工支援方法
3日前
株式会社地盤リスク研究所
盛土安定化工法、及び盛土構造
20日前
前田工繊株式会社
洗掘防止ユニットの撤去方法
3日前
スエヒロシステム株式会社
小型アンカ一体型ライナー
3日前
株式会社高知丸高
水陸両用浚渫機
10日前
株式会社SAICON
設備機器設置台及び設備機器設置構造
9日前
コベルコ建機株式会社
作業機械走行システム
2日前
東洋建設株式会社
捨石投入装置
16日前
株式会社竹内製作所
作業用車両
4日前
株式会社竹内製作所
作業用車両
4日前
ジェコス株式会社
鋼材立付け用治具および鋼材の打設方法
20日前
東京電力ホールディングス株式会社
水中沈殿物回収システム
16日前
コベルコ建機株式会社
制御装置、建設機械、及びプログラム
2日前
西武ポリマ化成株式会社
ハイブリッドケーソンの底版部構造
2日前
東京応化工業株式会社
構造体、及び海洋生物の付着防止方法
16日前
弘和産業株式会社
ケーシング用パッカー
9日前
株式会社小松製作所
電動式作業機械
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ