TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025012609
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023115553
出願日
2023-07-14
発明の名称
車両の制御方法及び車両の制御装置
出願人
日産自動車株式会社
代理人
個人
,
個人
主分類
B60L
15/20 20060101AFI20250117BHJP(車両一般)
要約
【課題】車輪がスリップしているか否かを精度良く判定する。
【解決手段】車両は、悪路判定処理により悪路を走行していると判定されると、スリップしているか否かを判定するスリップ判定処理を終了もしくはスリップ判定処理の実施が禁止される。車両は、スリップしていると判定されると駆動源の出力を低下させる。スリップ判定処理は、車輪加速度が所定の正のスリップ判定閾値を所定のスリップ判定時間超えた場合に車両がスリップしていると判定する。悪路判定処理は、車輪加速度が所定の負の悪路判定閾値を下回ると車両が悪路を走行していると判定する。
【選択図】図6
特許請求の範囲
【請求項1】
車両が悪路を走行しているか否かを判定する悪路判定処理を実施し、
上記悪路判定処理により車両が悪路を走行していると判定されると車両がスリップしているか否かを判定するスリップ判定処理を終了もしくは当該スリップ判定処理の実施が禁止され、
上記スリップ判定処理の結果、車両がスリップしていると判定されると車両の駆動源の出力を低下させ、
上記スリップ判定処理は、車輪加速度が所定の正のスリップ判定閾値を所定のスリップ判定時間超えた場合に車両がスリップしていると判定し、
上記悪路判定処理は、上記車輪加速度が所定の負の悪路判定閾値を下回ると車両が悪路を走行していると判定することを特徴とする車両の制御方法。
続きを表示(約 1,100 文字)
【請求項2】
上記悪路判定閾値は、上記車輪加速度から上記スリップ判定閾値と上記車輪加速度のオフセット量を減じた値であることを特徴とする請求項1に記載の車両の制御方法。
【請求項3】
上記悪路判定処理は、車両が加速しているときに実施することを特徴とする請求項1に記載の車両の制御方法。
【請求項4】
車両の駆動力が走行抵抗よりも大きいときに車両が加速していると判定することを特徴とする請求項3に記載の車両の制御方法。
【請求項5】
上記悪路判定処理により車両が悪路を走行していると判定された場合、上記車輪加速度が予め設定された所定の悪路判定解除時間以上連続して所定の悪路判定解除閾値を上回るまで車両が悪路を走行しているという判定を維持することを特徴とする請求項1に記載の車両の制御方法。
【請求項6】
車両は、モータを駆動源とするものであって、
上記スリップ判定閾値は、上記モータの駆動力に応じて設定することを特徴とする請求項1に記載の車両の制御方法。
【請求項7】
上記スリップ判定閾値は、車両の加速時に発生する上記車輪加速度では超えないように設定された第1車輪スリップ閾値と、走行中の上記車輪加速度の変動では超えることがない、上記第1車輪スリップ閾値よりも大きい第2車輪スリップ閾値と、であり、
上記スリップ判定時間の長さは、上記第1車輪スリップ閾値を用いたスリップ判定処理時の方が上記第2車輪スリップ閾値を用いたスリップ判定処理時よりも長く設定することを特徴とする請求項6に記載の車両の制御方法。
【請求項8】
上記スリップ判定処理は、車両の車輪毎に実施することを特徴とする請求項1に記載の車両の制御方法。
【請求項9】
車両が悪路を走行しているか否かを判定する悪路判定処理を実施する悪路判定処理実施部と、
車両がスリップしているか否かを判定するスリップ判定処理を実施するスリップ判定処理実施部と、
車両がスリップしていると判定されると車両の駆動源の出力を低下させる出力制御部と、を有し、
上記スリップ判定処理実施部は、上記悪路判定処理により車両が悪路を走行していると判定されると上記スリップ判定処理を終了もしくは当該スリップ判定処理の実施を禁止するものであって、車輪加速度が所定の正のスリップ判定閾値を所定のスリップ判定時間超えた場合に車両がスリップしていると判定し、
上記悪路判定処理実施部は、上記車輪加速度が所定の負の悪路判定閾値を下回ると車両が悪路を走行していると判定することを特徴とする車両の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の制御方法及び車両の制御装置に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
例えば、特許文献1には、車輪加速度が所定のスリップ検出閾値を超えた場合に、車輪がスリップしていると判定することが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2006-283591号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1においては、車輪加速度が大きく変動するような路面、すなわち悪路を走行しているような場合に、車輪がスリップしていないにも関わらず、車輪加速度がスリップ検出閾値を超えてしまう虞がある。従って、特許文献1においては、車両が悪路を走行していると、誤って車輪がスリップしていると判定され、運転者が意図しないトルクダウン及び減速が発生する虞がある。
【0005】
つまり、車両の車輪がスリップしているか否かを判定するにあたっては、誤ったスリップ判定が行われないように、更なる改善の余地がある。
【課題を解決するための手段】
【0006】
本発明の車両は、車両が悪路を走行しているか否かを判定する悪路判定処理を実施し、上記悪路判定処理により車両が悪路を走行していると判定されると車両がスリップしているか否かを判定するスリップ判定処理を終了もしくは当該スリップ判定処理の実施が禁止され、車両がスリップしていると判定されると車両の駆動源の出力を低下させる。
【0007】
上記スリップ判定処理は、車輪加速度が所定の正のスリップ判定閾値を所定のスリップ判定時間超えた場合に車両がスリップしていると判定する。
【0008】
上記悪路判定処理は、上記車輪加速度が所定の負の悪路判定閾値を下回ると車両が悪路を走行していると判定する。
【発明の効果】
【0009】
本発明によれば、悪路判定処理を行うことにより、車輪がスリップしているか否かを精度良く判定することが可能となり、瞬間的な車輪加速度変動時に、運転者の意図しない車両のトルクダウンや減速を回避することができる。
【図面の簡単な説明】
【0010】
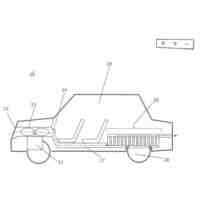
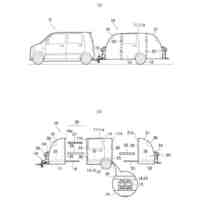
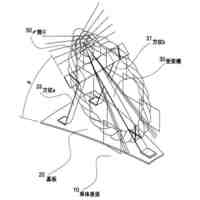
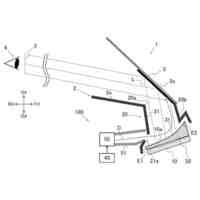
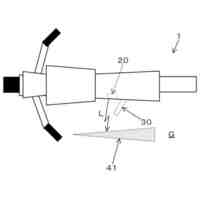
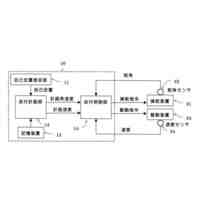
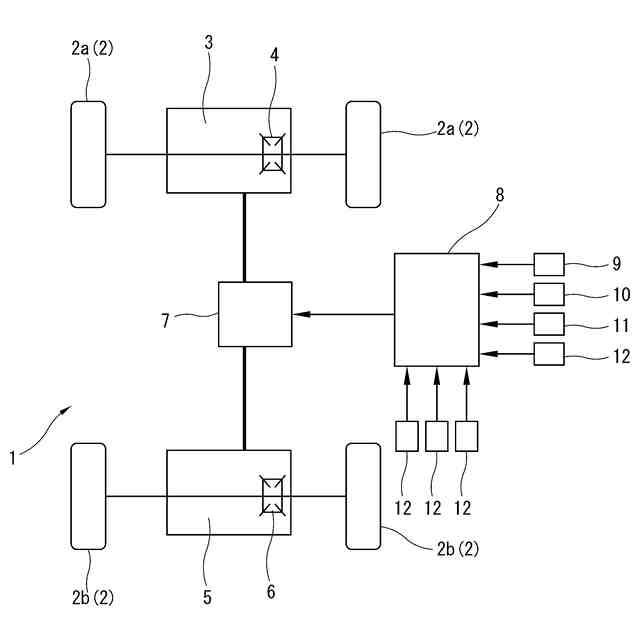
本発明が適用される車両の駆動システムの概略を模式的に示した説明図。
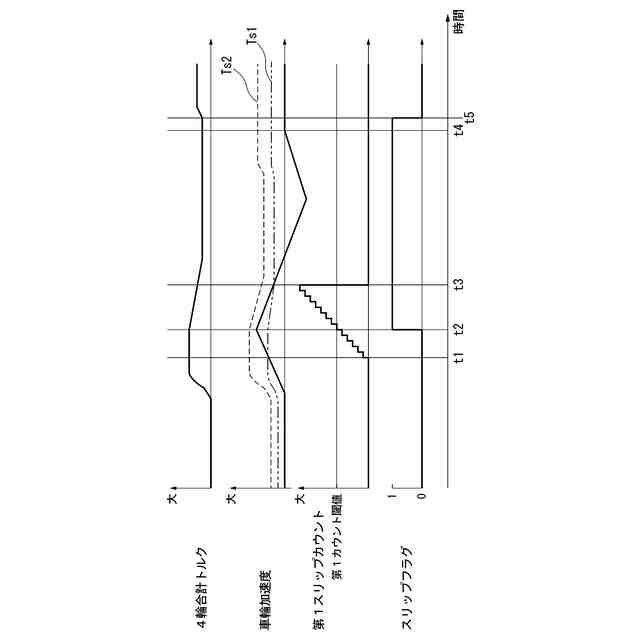
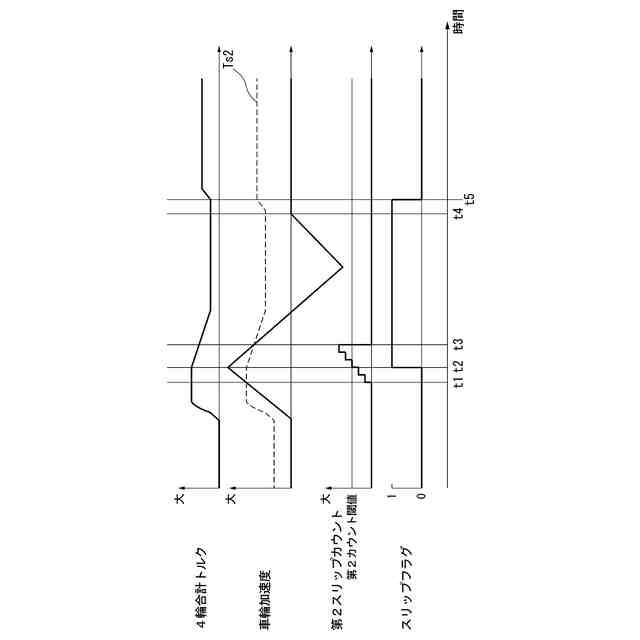
スリップ判定処理時における各種パラメータの挙動の一例を示すタイミングチャート。
スリップ判定処理時における各種パラメータの挙動の一例を示すタイミングチャート。
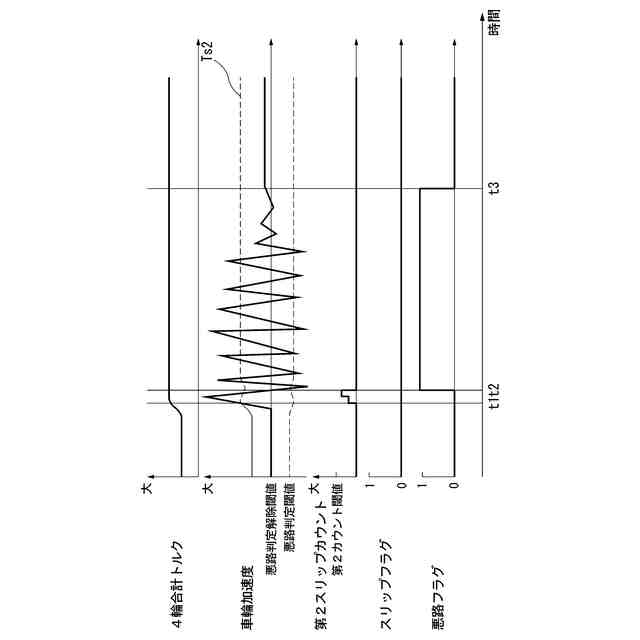
悪路判定処理時における各種パラメータの挙動の一例を示すタイミングチャート。
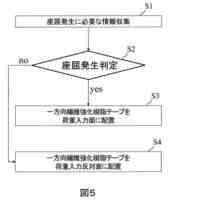
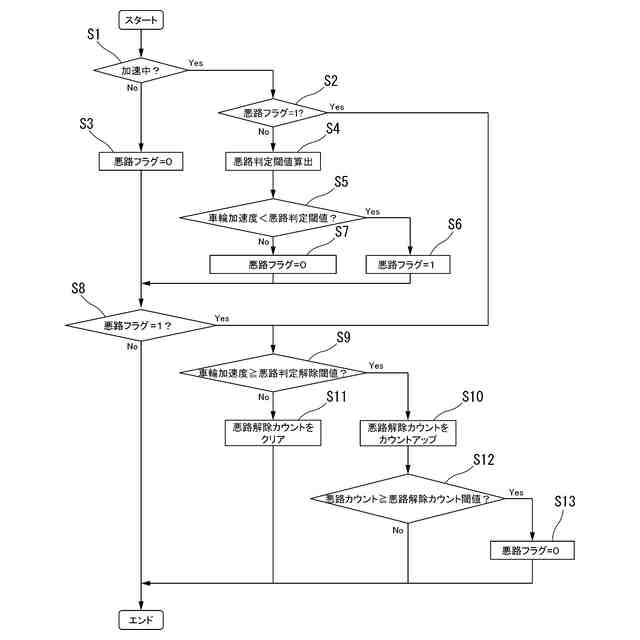
悪路判定処理の流れを示すフローチャート。
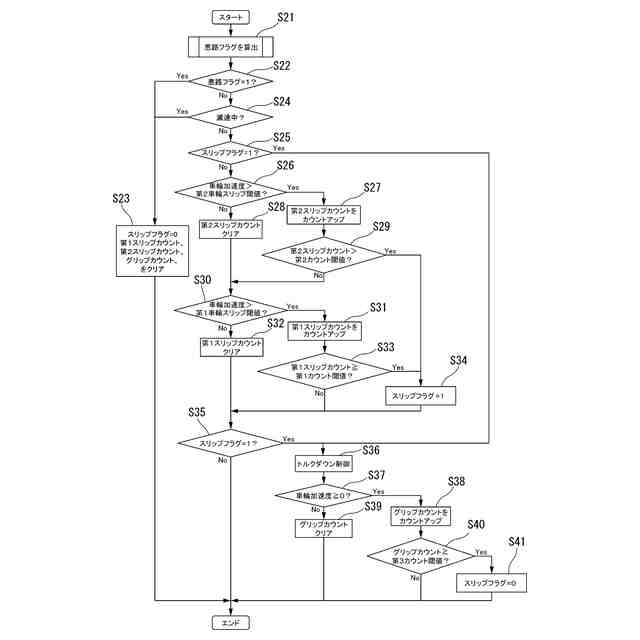
本発明が適用された車両の制御の流れを示すフローチャート。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
車両
2か月前
個人
授乳用車両
23日前
個人
眼科手術車
1か月前
個人
自動車運転補助装置
2か月前
井関農機株式会社
作業車両
1か月前
日本精機株式会社
表示装置
9日前
井関農機株式会社
作業車両
23日前
日本精機株式会社
表示装置
1か月前
個人
キャンピングトレーラー
1か月前
個人
台車用車輪止め具
1か月前
個人
自動車外部装着用しめ飾り
2か月前
日本精機株式会社
車載表示装置
1か月前
日本精機株式会社
車載表示装置
2か月前
個人
謝意シグナル装着車
1か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
1か月前
株式会社青木製作所
タンクローリ
1か月前
マツダ株式会社
車両
16日前
トヨタ自動車株式会社
車両
1か月前
日本精機株式会社
車両用表示装置
3か月前
トヨタ自動車株式会社
車両
2か月前
日本精機株式会社
車両用表示装置
23日前
株式会社小糸製作所
投影装置
20日前
ダイハツ工業株式会社
バッグ
3か月前
東レ株式会社
車両用部材の補強方法
1か月前
株式会社SUBARU
保護構造
10日前
YKS特許評価株式会社
自動車
2か月前
株式会社FUTU-RE
車両制御装置
2か月前
豊田合成株式会社
乗員保護装置
10日前
ダイハツ工業株式会社
車両構造
1か月前
トヨタ自動車株式会社
搬送装置
2か月前
株式会社SUBARU
保護構造
16日前
豊田合成株式会社
乗員保護装置
1か月前
関西広域輸送協同組合
制限装置
10日前
豊田合成株式会社
乗員保護装置
4日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ