TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025012220
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023114919
出願日
2023-07-13
発明の名称
処理装置及び補正方法
出願人
東京エレクトロン株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
H01L
21/68 20060101AFI20250117BHJP(基本的電気素子)
要約
【課題】処理チャンバ内において搬送ロボットによってデジタルセンサを移動させ、ステージの周端位置を精度良く検出し、ティーチングを実施する処理装置及び位置補正方法を提供する。
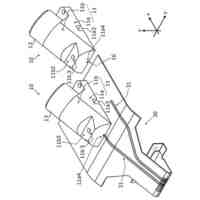
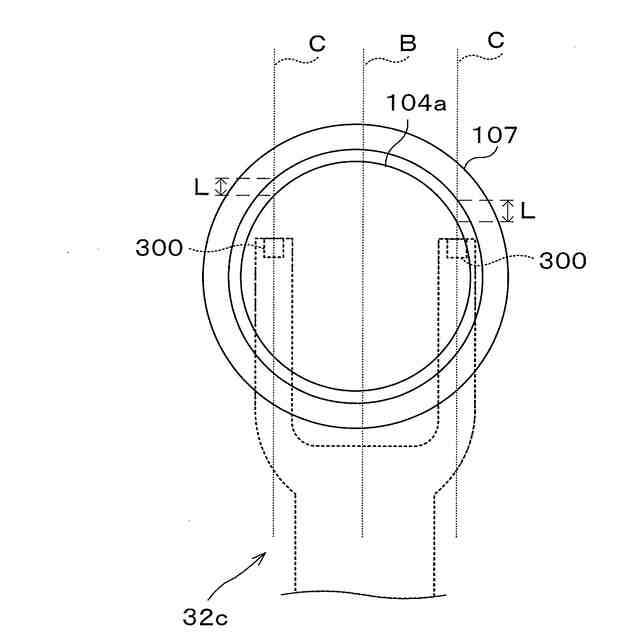
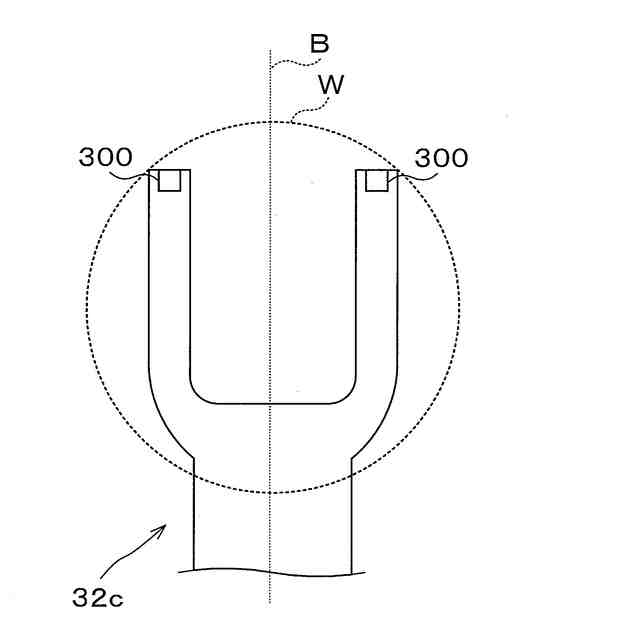
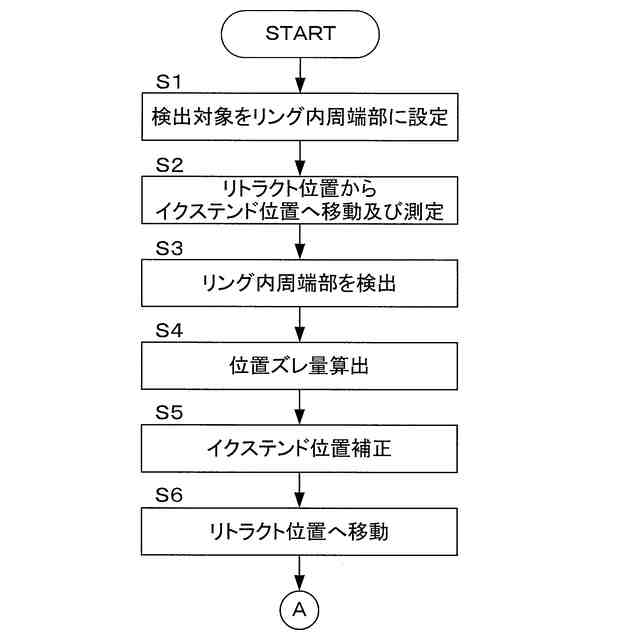
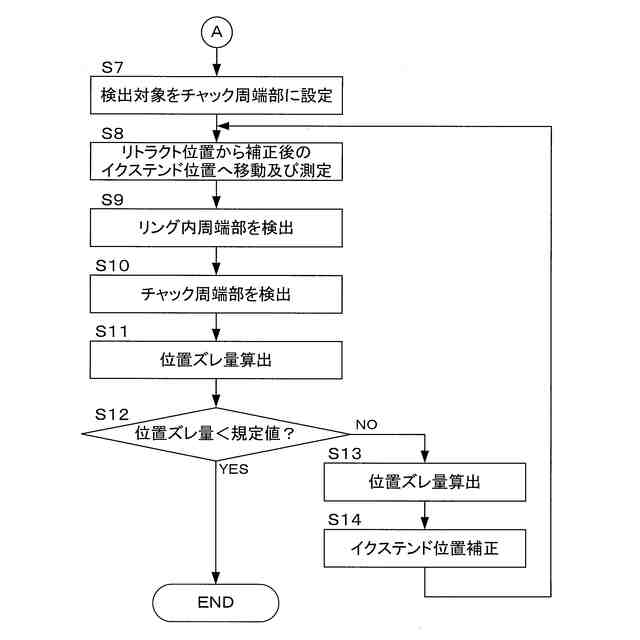
【解決手段】基板処理装置の搬送ロボットにおいて、円形状の載置部104aを含むエンドエフェクタ32cは、載置された基板を囲み得る環状部材107を支持する。基板搬送ロボットは、エンドエフェクタをデジタルセンサ300と共に、第1位置から基板処理装置のステージ上を通り第2位置に向かうよう直線的に移動する際に、載置部の周端部より外側に位置する基準点を検出し、基準点に基づいて搬送ロボットの位置を補正し、エンドエフェクタを補正後の第2位置に向かうよう直線的に移動する際に、環状部材の内周端部を検出すると共に、内周端部を基準として、載置部の周端部を検出し、載置部の周端部の検出結果に基づいて、処理チャンバに対する搬送ロボットの位置を補正する。
【選択図】図9
特許請求の範囲
【請求項1】
基板を処理する処理チャンバを有する処理装置であって、
基板が載置される円形状の載置部を含むステージを有し、前記載置部に載置された前記基板に処理を施し、
前記ステージは、前記載置部に載置された前記基板を囲み得る円環状に形成された環状部材を支持し、
前記載置部に前記基板を搬送する搬送ロボットは、エンドエフェクタを有し、前記基板を前記エンドエフェクタで保持して搬送し、
前記処理装置は、
(A)前記エンドエフェクタを、デジタルセンサと共に、第1位置から前記ステージ上を通り第2位置に向かうよう、直線的に移動させる工程と、
(B)前記(A)工程中の前記デジタルセンサによるデジタル的な測定結果に基づいて、前記載置部の周端部より外側に位置する基準点を検出する工程と、
(C)前記基準点に基づいて前記搬送ロボットの前記処理チャンバに対する位置を補正する第1の補正制御を実施する工程と、
(D)前記エンドエフェクタを、前記デジタルセンサと共に、前記第1位置から前記ステージ上を通り補正後の第2位置に向かうよう、直線的に移動させる工程と、
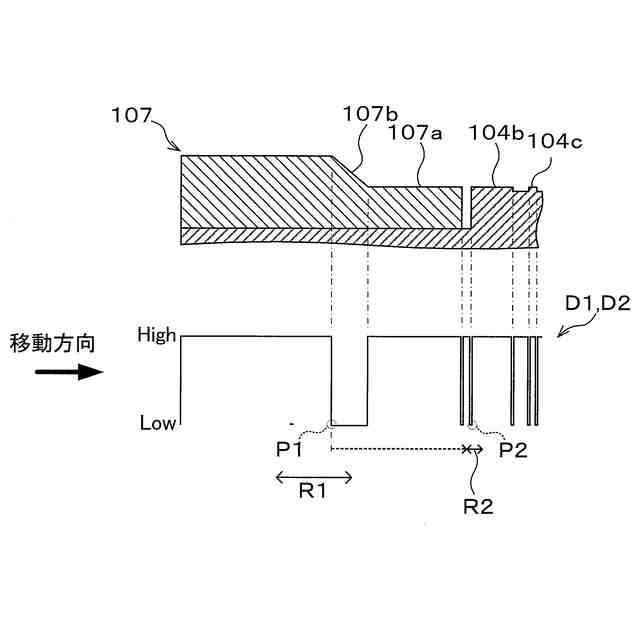
(E)前記(D)工程中の前記デジタルセンサによるデジタル的な測定結果に基づいて、前記環状部材の内周端部を検出すると共に、前記内周端部を基準として、前記載置部の周端部を検出する工程と、
(F)前記載置部の周端部の検出結果に基づいて、前記処理チャンバに対する前記搬送ロボットの位置を補正する第2の補正制御を実施する工程と、を実行するように構成されている、処理装置。
続きを表示(約 1,200 文字)
【請求項2】
基板を処理する処理チャンバを有する処理装置であって、
前記処理チャンバ内で基板が載置される円形状の載置部を含むステージと、
前記載置部に載置された前記基板を囲み得る円環状に形成された環状部材と、
前記基板を保持するエンドエフェクタを有する搬送アームにより、前記処理チャンバ内の前記載置部に前記基板を搬送する搬送ロボットと、
前記搬送アームにより移動可能に設けられ、検出対象をセンシングすることで前記検出対象の位置を検出するデジタルセンサと、
前記搬送アームおよび前記デジタルセンサを制御することにより、前記載置部に対する前記搬送ロボットの位置補正を行う制御部と、を備え、
前記制御部は、
前記搬送アームを前記処理チャンバ内で移動させる第1のエクステンド動作において、前記デジタルセンサにより前記載置部の周端部より外側に位置する領域をセンシングすることで基準点を検出し、前記基準点に基づき前記搬送ロボットの前記処理チャンバに対する位置を補正する第1の補正制御と、
前記第1の補正制御の後、前記搬送アームを前記処理チャンバ内で移動させる第2のエクステンド動作において、前記デジタルセンサにより前記基準点から前記載置部に向かう領域をセンシングすることで前記載置部の周端部の位置を検出し、前記周端部の位置に基づき前記搬送ロボットの前記処理チャンバに対する位置を補正する第2の補正制御と、を実行するように構成される、処理装置。
【請求項3】
前記基準点は、前記環状部材の内周端部である、請求項1または2に記載の処理装置。
【請求項4】
前記基準点は、前記環状部材の外周端部である、請求項1または2に記載の処理装置。
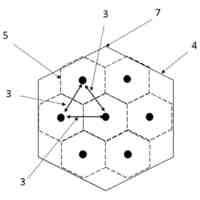
【請求項5】
前記ステージは、前記環状部材の外周を囲み得る円環状に形成された別の環状部材を支持し、前記基準点は、前記別の環状部材である、請求項1または2に記載の処理装置。
【請求項6】
前記第1の補正制御で用いる前記基準点の数は、前記デジタルセンサごとに1点である、請求項1または2に記載の処理装置。
【請求項7】
前記第1の補正制御で用いる前記基準点の数は、前記デジタルセンサごとに2点である、請求項1または2に記載の処理装置。
【請求項8】
前記デジタルセンサは、前記エンドエフェクタの先端部に搭載されている、請求項1または2に記載の処理装置。
【請求項9】
前記デジタルセンサは、前記エンドエフェクタにより保持される治具基板に搭載されている、請求項1または2に記載の処理装置。
【請求項10】
前記デジタルセンサは、光学式または静電容量式デジタルセンサである、請求項1または2に記載の処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、処理装置及び補正方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
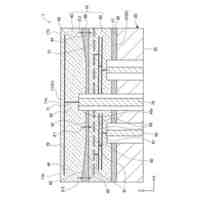
例えば半導体デバイス等の製造プロセスにおいては、半導体ウェハ(以下、「ウェハ」という。)等の基板に対して、エッチング処理等の所定の処理が基板処理装置によって施される。このような処理は、基板処理装置の処理チャンバ内のステージに基板が載置された状態で行われる。
【0003】
基板処理装置による基板に対する処理を適切に実行するため、処理対象の基板をステージ等の適切な位置に正確に受け渡す必要がある。このため、基板処理装置に基板を搬送する搬送ロボットにおける重要な位置(例えば基板の受け渡し位置)を、搬送ロボット(の動作)を制御する制御部に位置座標として記憶させる、いわゆるティーチングが行われている。
【0004】
搬送ロボットのティーチングは、ステージの周端位置の検出結果に基づいて(具体的にはステージにおいて基板が載置される載置部の周端位置の検出結果に基づいて)行われる。この場合、ティーチングを正確に行い基板処理装置による所望の処理結果を得るには、ステージの周端位置を精度良く検出する必要がある。
例えば、特許文献1などに開示されているように、処理チャンバの外部上方に設けられた位置検出センサでステージの周端部の周囲をビューポート越しに走査することで、ステージの周端位置を検出する手法が知られている。しかし、この手法では、ビューポート等のセンサ搭載用部材を基板処理装置に設ける必要があり、当該部材が処理結果に影響を及ぼす虞がある。また、ビューポートを設けることが難しいときは、位置検出センサは処理チャンバ内に設けられ得るが、この場合、位置検出センサに反応生成物が付着するため、メンテナンスコスト上昇を招く。
【先行技術文献】
【特許文献】
【0005】
特開2021-92502号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
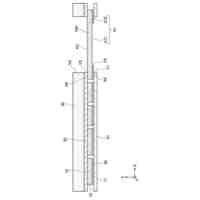
このような背景から、搬送ロボットの基板保持部を位置検出センサと共に処理チャンバ内を移動させ、この移動時のセンサによる測定結果に基づいて、ティーチングを実施することの要求がある。具体的には、基板保持部を先端に有する搬送アームをイクステンド動作させ、当該動作時における基板保持部に搭載または支持された位置検出センサによる測定結果に基づいて、ティーチングを実施することの要求がある。
【0007】
このような手法でもって、複雑な構造的のためにノイズ・誤検知要因が多い処理チャンバ内のステージの周端位置を高精度に検出するためには、位置検出に用いるセンサは、デジタルセンサよりもアナログセンサを用いる方が好適である。しかしながら、アナログセンサを利用する場合、アナログ信号の特性上、信号遅延が不可避であることから、搬送アームを駆動する駆動部のエンコーダと高精度な同期要求を満たすことができず、実質的に正確なティーチングを実施するとこができないとの課題がある。
【0008】
したがって、駆動部のエンコーダと同期要求を満たしつつ、搬送アームの基板保持部を上述のように移動させてより正確なティーチングを実施しようとする場合、信号遅延の影響が少ないデジタルセンサを使用する必要がある。
【0009】
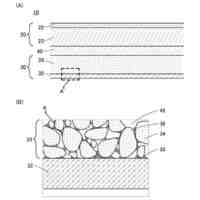
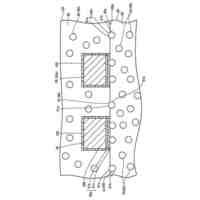
しかしながら、例えば、基板に対してエッチング処理を行う処理チャンバ内のステージの周縁には、デジタル的な測定結果に対する構造的ノイズ要因(例えば、ステージの載置部としての静電チャックに設けられたシールバンド、ドット、被ブラスト処理部等)が多く存在する。そのため、デジタルセンサを使用する場合、誤検知要因が多く存在し、測定結果に基づいてステージの周端位置を精度良く検知・判定することができず、結果として位置補正の精度が低下する虞がある。
以上から、本開示は、処理チャンバ内において搬送ロボットによってデジタルセンサを移動させることでティーチングを行う場合であっても、ステージの周端位置を精度良く検出し、ティーチングを実施することができる処理装置及び位置補正方法を提供する。
【課題を解決するための手段】
【0010】
本開示の一態様は、基板を処理する処理チャンバを有する処理装置であって、基板が載置される円形状の載置部を含むステージを有し、前記載置部に載置された前記基板に処理を施し、前記ステージは、前記載置部に載置された前記基板を囲み得る円環状に形成された環状部材を支持し、前記載置部に前記基板を搬送する搬送ロボットは、エンドエフェクタを有し、前記基板を前記エンドエフェクタで保持して搬送し、前記処理装置は、(A)前記エンドエフェクタを、デジタルセンサと共に、第1位置から前記ステージ上を通り第2位置に向かうよう、直線的に移動させる工程と、(B)前記(A)工程中の前記デジタルセンサによるデジタル的な測定結果に基づいて、前記載置部の周端部より外側に位置する基準点を検出する工程と、(C)前記基準点に基づいて前記搬送ロボットの前記処理チャンバに対する位置を補正する第1の補正制御を実施する工程と、(D)前記エンドエフェクタを、前記デジタルセンサと共に、前記第1位置から前記ステージ上を通り補正後の第2位置に向かうよう、直線的に移動させる工程と、(E)前記(D)工程中の前記デジタルセンサによるデジタル的な測定結果に基づいて、前記環状部材の内周端部を検出すると共に、前記内周端部を基準として、前記載置部の周端部を検出する工程と、(F)前記載置部の周端部の検出結果に基づいて、前記処理チャンバに対する前記搬送ロボットの位置を補正する第2の補正制御を実施する工程と、を実行するように構成されている。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
電波吸収体
18日前
個人
テーブルタップ
15日前
キヤノン株式会社
電子機器
15日前
三洋化成工業株式会社
軟磁性材料
5日前
株式会社ダイヘン
碍子
20日前
古河電池株式会社
制御弁式鉛蓄電池
11日前
株式会社ヨコオ
同軸コネクタ
11日前
株式会社GSユアサ
蓄電装置
15日前
株式会社GSユアサ
蓄電装置
15日前
株式会社半導体エネルギー研究所
電池
4日前
株式会社ユーシン
スイッチ装置
15日前
株式会社ユーシン
スイッチ装置
15日前
日本特殊陶業株式会社
保持装置
5日前
個人
六角形パネル展開アレーアンテナ
15日前
TDK株式会社
コイル部品
11日前
三洲電線株式会社
撚線導体
5日前
イビデン株式会社
プリント配線板
18日前
ローム株式会社
半導体装置
15日前
住友電装株式会社
コネクタ
11日前
日本圧着端子製造株式会社
コネクタ
19日前
オムロン株式会社
リード線整列治具
15日前
太陽誘電株式会社
コイル部品
15日前
株式会社デンソー
半導体装置
15日前
大和電器株式会社
コンセント
11日前
日産自動車株式会社
電子機器
18日前
ニチコン株式会社
コンデンサ
11日前
三洋化成工業株式会社
リチウムイオン電池
5日前
富士電機株式会社
半導体装置
15日前
株式会社デンソー
半導体装置
15日前
株式会社村田製作所
二次電池
18日前
日本無線株式会社
モノポールアンテナ
15日前
株式会社ジェイテクト
電源装置
20日前
株式会社ダイフク
搬送車
18日前
株式会社村田製作所
電池パック
20日前
個人
ユニバーサルデザインコンセントプラグ
15日前
株式会社ダイフク
搬送車
18日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ