TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025012200
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023114870
出願日
2023-07-13
発明の名称
搬送装置およびティーチング方法
出願人
東京エレクトロン株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
H01L
21/677 20060101AFI20250117BHJP(基本的電気素子)
要約
【課題】自動ティーチング機能の拡張を目的とし、フォーク先端にセンサを搭載し、基板の搬送精度をより向上させる搬送装置及びティーチング方法を提供する。
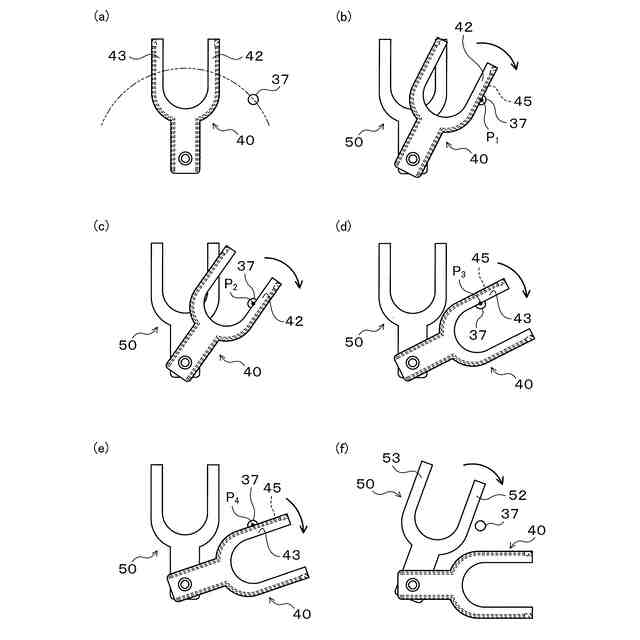
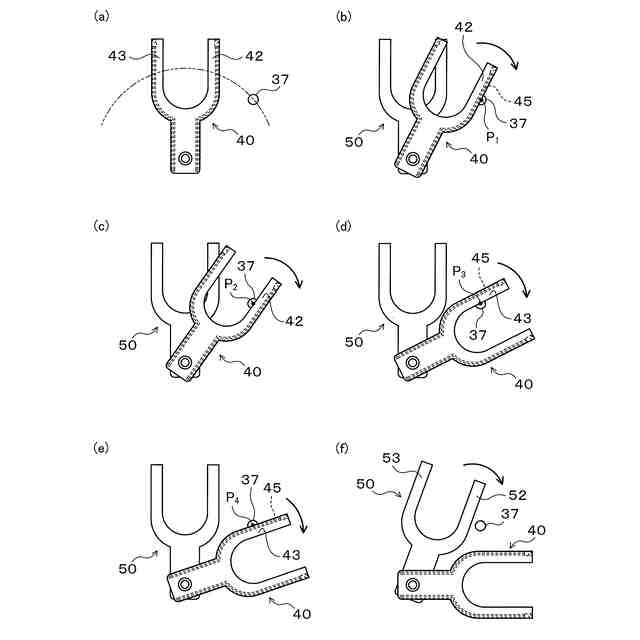
【解決手段】ウェハ処理システムにおいて、搬送装置は、第1保持部42、43と、第1保持部に設けられたセンサと、鉛直方向の回転軸と、を有する第1フォーク40と、第2保持部52、53と、第1フォークと同軸の回転軸と、を有する第2フォーク50と、両フォークを有する搬送ロボットを収容する搬送室と、搬送室に設けられ、鉛直方向に向いた光学センサ37と、を備え、第1フォークを回転させて第1保持部における一方のエッジ位置である第1エッジ位置P2、P3を光学センサで検出し、第2フォークを回転させて第1エッジ位置と同一側エッジ位置である第2エッジ位置を光学センサで検出し、第1エッジ位置と第2エッジ位置とに基づいて第1フォークと第2フォークの回転角度差を算出する。
【選択図】図7
特許請求の範囲
【請求項1】
基板を搬送する搬送装置であって、
前記基板の載置面を有する第1保持部と、前記第1保持部の先端部に設けられたセンサと、前記センサに接続し、前記第1保持部の幅方向における両側のうちの一方側にのみに取り付けられたケーブルと、鉛直方向に延在する回転軸と、を有する第1フォークと、
前記基板の載置面を有する第2保持部と、前記第1フォークと同軸の回転軸と、を有する第2フォークと、
前記第1フォーク及び前記第2フォークを有する搬送ロボットと、
前記搬送ロボットを収容する減圧可能な搬送室と、
前記搬送室に設けられ、光軸が鉛直方向に向いた光学センサと、
制御装置と、を備え、
前記第1保持部の前記幅方向において前記ケーブルが取り付けられていない他方側を非配線側とするとき、
前記制御装置は、前記第1フォークを回転させて前記第1保持部における前記非配線側エッジ位置である第1エッジ位置を前記光学センサで検出し、前記第2フォークを回転させて前記第2保持部における前記非配線側と同一側エッジ位置である第2エッジ位置を前記光学センサで検出し、前記第1エッジ位置と前記第2エッジ位置とに基づいて前記第1フォークと前記第2フォークの回転角度差を算出する、搬送装置。
続きを表示(約 1,400 文字)
【請求項2】
前記第1保持部における前記ケーブルの配線側の側面に、前記ケーブルが配置される溝が形成されている、請求項1に記載の搬送装置。
【請求項3】
前記配線側は、前記第1保持部の幅方向の外側である、請求項2に記載の搬送装置。
【請求項4】
前記光学センサは、前記第1フォーク及び前記第2フォークのホームポジションにおいて、前記第1保持部または前記第2保持部に前記基板が保持されているか否かを検出するセンサである、請求項1~3のいずれか一項に記載の搬送装置。
【請求項5】
前記光学センサは、前記第1保持部または前記第2保持部に保持された前記基板の所定位置からの位置ズレを検出するセンサである、請求項1~3のいずれか一項に記載の搬送装置。
【請求項6】
前記制御装置は、前記第1エッジ位置を検出する際に、前記第1フォークを時計回りに回転させた時の第1エッジ位置と、前記第1フォークを反時計回りに回転させた時の第1エッジ位置をそれぞれ検出し、前記第2エッジ位置を検出する際に、前記第2フォークを時計回りに回転させた時の第2エッジ位置と、前記第2フォークを反時計回りに回転させた時の第2エッジ位置をそれぞれ検出する、請求項1~3のいずれか一項に記載の搬送装置。
【請求項7】
基板を搬送する搬送装置におけるティーチング方法であって、
前記搬送装置は、
前記基板の載置面を有する第1保持部と、前記第1保持部の先端部に設けられたセンサと、前記センサに接続し、前記第1保持部の幅方向における両側のうちの一方側にのみに取り付けられたケーブルと、鉛直方向に延在する回転軸と、を有する第1フォークと、
前記基板の載置面を有する第2保持部と、前記第1フォークと同軸の回転軸と、を有する第2フォークと、
前記第1フォーク及び前記第2フォークを有する搬送ロボットと、
前記搬送ロボットを収容する減圧可能な搬送室と、
前記搬送室に設けられ、光軸が鉛直方向に向いた光学センサと、
制御装置と、を備え、
前記第1保持部の前記幅方向において前記ケーブルが取り付けられていない他方側を非配線側とするとき、
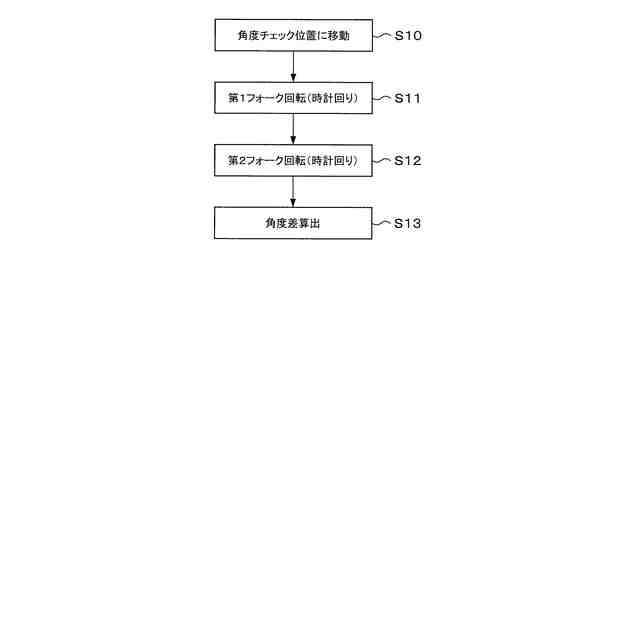
前記第1フォークを回転させて前記第1保持部における前記非配線側エッジ位置である第1エッジ位置を前記光学センサで検出する工程と、
前記第2フォークを回転させて前記第2保持部における前記非配線側と同一側エッジ位置である第2エッジ位置を前記光学センサで検出する工程と、
前記第1エッジ位置と前記第2エッジ位置とに基づいて前記第1フォークと前記第2フォークの回転角度差を算出する工程と、を有する、ティーチング方法。
【請求項8】
前記第1保持部における前記ケーブルの配線側の側面に、前記ケーブルが収容される溝が形成されている、請求項7に記載のティーチング方法。
【請求項9】
前記配線側は、前記第1保持部の幅方向の外側である、請求項8に記載のティーチング方法。
【請求項10】
前記光学センサは、前記第1フォーク及び前記第2フォークのホームポジションにおいて、前記第1保持部または前記第2保持部に前記基板が保持されているか否かを検出するセンサである、請求項7~9のいずれか一項に記載のティーチング方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、搬送装置およびティーチング方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
例えば、特許文献1に記載されるように、基板を支持する複数のアームが同軸に支持された搬送ロボットが知られている。
【先行技術文献】
【特許文献】
【0003】
特開2020-119927号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような、搬送ロボットを用いる搬送装置において、自動ティーチング機能の拡張を目的とし、フォーク先端にセンサを搭載することが検討されている。
本開示にかかる技術は、このような搬送装置において、基板の搬送精度をより向上させることができる搬送装置、ティーチング方法に関する。
【課題を解決するための手段】
【0005】
本開示の一態様は、基板を搬送する搬送装置であって、前記基板の載置面を有する第1保持部と、前記第1保持部の先端部に設けられたセンサと、前記センサに接続し、前記第1保持部の幅方向における両側のうちの一方側にのみに取り付けられたケーブルと、鉛直方向に延在する回転軸と、を有する第1フォークと、前記基板の載置面を有する第2保持部と、前記第1フォークと同軸の回転軸と、を有する第2フォークと、前記第1フォーク及び前記第2フォークを有する搬送ロボットと、前記搬送ロボットを収容する減圧可能な搬送室と、前記搬送室に設けられ、光軸が鉛直方向に向いた光学センサと、制御装置と、を備え、前記第1保持部の前記幅方向において前記ケーブルが取り付けられていない他方側を非配線側とするとき、前記制御装置は、前記第1フォークを回転させて前記第1保持部における前記非配線側エッジ位置である第1エッジ位置を前記光学センサで検出し、前記第2フォークを回転させて前記第2保持部における前記非配線側と同一側エッジ位置である第2エッジ位置を前記光学センサで検出し、前記第1エッジ位置と前記第2エッジ位置とに基づいて前記第1フォークと前記第2フォークの回転角度差を算出する。
【発明の効果】
【0006】
本開示によれば、自動ティーチング機能の拡張を目的とし、フォーク先端にセンサを搭載する搬送装置において、基板の搬送精度をより向上させることができる搬送装置、ティーチング方法を提供することができる。
【図面の簡単な説明】
【0007】
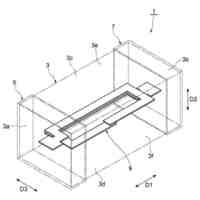
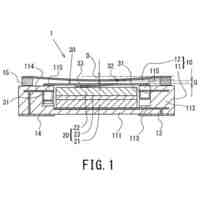
本実施形態にかかる搬送装置としての真空搬送装置を備えるウェハ処理システムの構成の概略を示す平面図である。
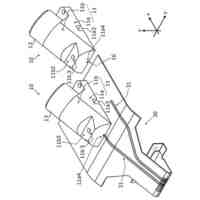
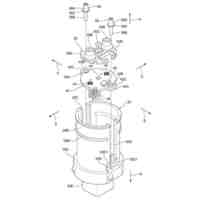
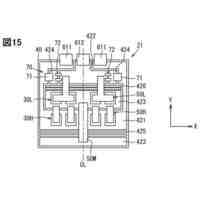
真空搬送装置が備える搬送機構の構成の概略を示す斜視図である。
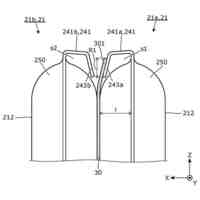
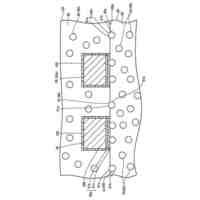
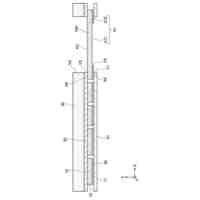
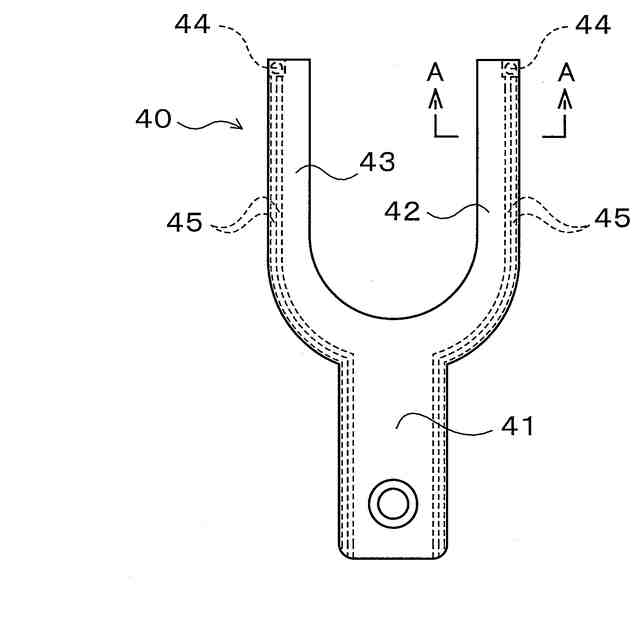
鉛直方向上方から見たときの第1フォークを模式的に示した平面図である。
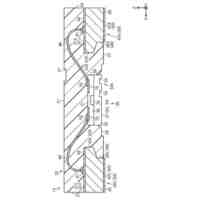
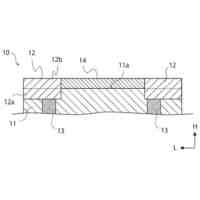
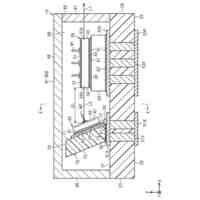
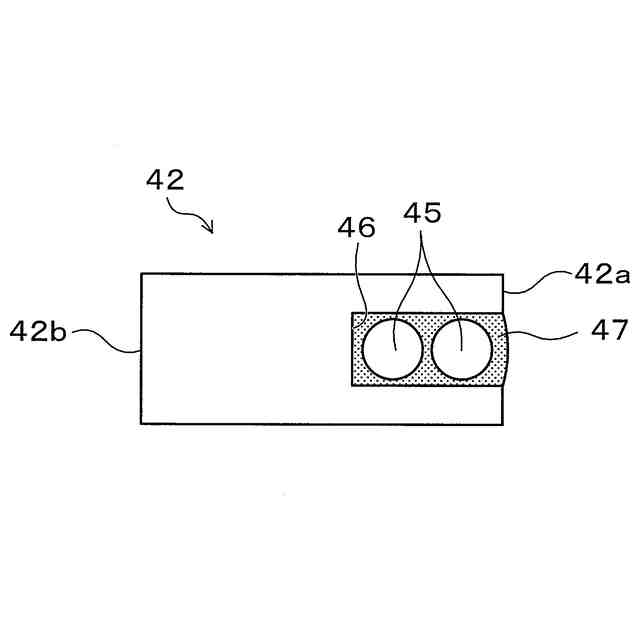
図3のA-A断面を示す図である。
鉛直方向上方から見たときの第2フォークを模式的に示した平面図である。
フォークの角度ズレの検出によるティーチング方法を説明するためのフローである。
上記のティーチング方法における第1フォークと第2フォークの動作を説明するための図である。
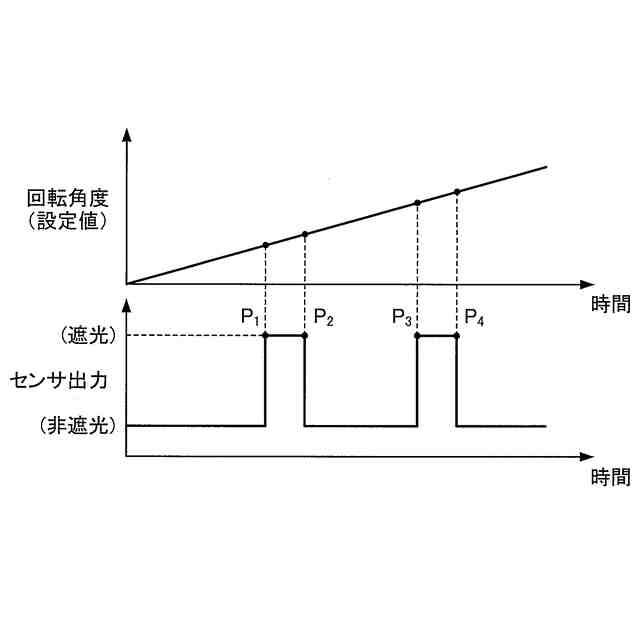
第1フォーク回転時における光学センサの出力履歴を模式的に示した図である。
第2フォーク回転時における光学センサの出力履歴を模式的に示した図である。
図8の出力履歴に図9の出力履歴を重ねた図である。
角度ズレが生じた状態の第1フォークと第2フォークを模式的に示した図である。
他の角度ズレの検出によるティーチング方法を説明するためのフローである。
図12のティーチング方法における第1フォーク回転時の光学センサの出力履歴を模式的に示した図である。
センサケーブルの他の配線例を示す図である。
センサケーブルの他の配線例を示す図である。
【発明を実施するための形態】
【0008】
以下、本実施形態にかかる基板の搬送装置について図面を参照して説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する要素については、同一の符号を付することにより重複説明を省略する。
【0009】
<ウェハ処理システム>
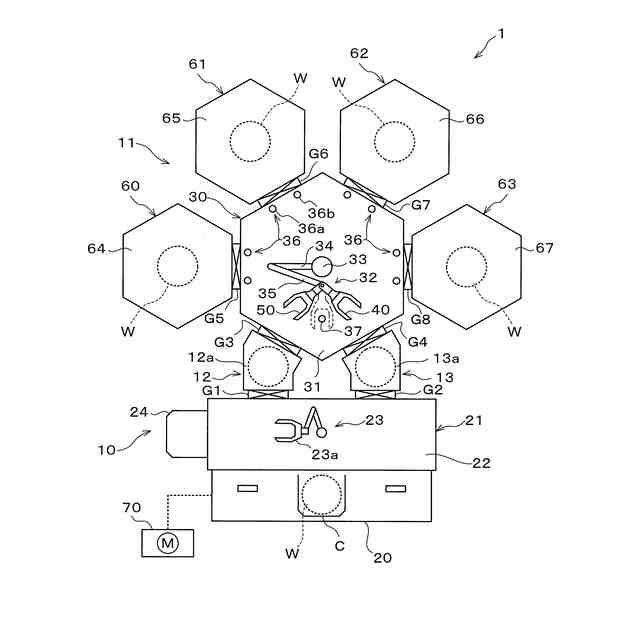
図1は、本実施形態にかかる搬送装置としての真空搬送装置を備えるウェハ処理システムの構成の概略を示す平面図である。
【0010】
図1のウェハ処理システム1は、基板としてのウェハWに対して、例えば成膜処理、拡散処理、エッチング処理等の所定の処理を減圧下で行うものである。
このウェハ処理システム1は、複数のウェハWを収容可能なキャリアCが搬入出されるキャリアステーション10と、減圧下でウェハWに所定の処理を施す複数の各種処理装置を備えた処理ステーション11とを一体に接続した構成を有している。キャリアステーション10と処理ステーション11は、2つのロードロック装置12、13を介して連結されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
電波吸収体
18日前
個人
テーブルタップ
15日前
三洋化成工業株式会社
軟磁性材料
5日前
キヤノン株式会社
電子機器
15日前
株式会社GSユアサ
蓄電装置
15日前
株式会社ヨコオ
同軸コネクタ
11日前
古河電池株式会社
制御弁式鉛蓄電池
11日前
株式会社GSユアサ
蓄電装置
15日前
株式会社ユーシン
スイッチ装置
15日前
個人
六角形パネル展開アレーアンテナ
15日前
日本特殊陶業株式会社
保持装置
5日前
株式会社半導体エネルギー研究所
電池
4日前
株式会社ユーシン
スイッチ装置
15日前
イビデン株式会社
プリント配線板
18日前
TDK株式会社
コイル部品
11日前
ローム株式会社
半導体装置
15日前
三洲電線株式会社
撚線導体
5日前
住友電装株式会社
コネクタ
11日前
三洋化成工業株式会社
リチウムイオン電池
5日前
太陽誘電株式会社
コイル部品
15日前
株式会社デンソー
半導体装置
15日前
株式会社デンソー
半導体装置
15日前
株式会社村田製作所
二次電池
18日前
ニチコン株式会社
コンデンサ
11日前
オムロン株式会社
リード線整列治具
15日前
富士電機株式会社
半導体装置
15日前
大和電器株式会社
コンセント
11日前
日産自動車株式会社
電子機器
18日前
TDK株式会社
電子部品
11日前
株式会社ダイフク
搬送車
18日前
株式会社ダイフク
搬送車
18日前
河村電器産業株式会社
速結端子
18日前
株式会社村田製作所
電池パック
5日前
個人
ユニバーサルデザインコンセントプラグ
15日前
マクセル株式会社
電気化学素子
15日前
ローム株式会社
半導体発光装置
11日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ