TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025011016
公報種別
公開特許公報(A)
公開日
2025-01-23
出願番号
2024046738
出願日
2024-03-22
発明の名称
基板処理システム
出願人
エスピーティーエス テクノロジーズ リミティド
代理人
弁理士法人YKI国際特許事務所
主分類
H01L
21/677 20060101AFI20250116BHJP(基本的電気素子)
要約
【課題】システムの設置面積を最小限に抑えながら、基板処理システムのスループット及び効率を改善する。
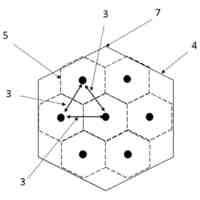
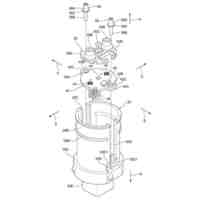
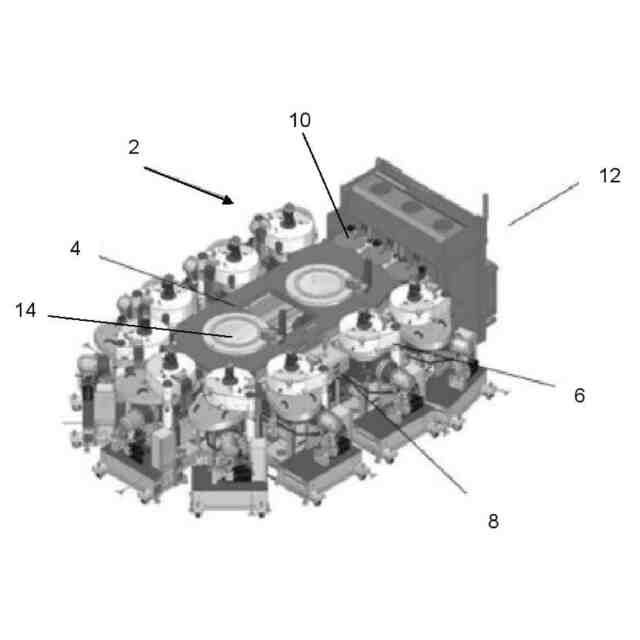
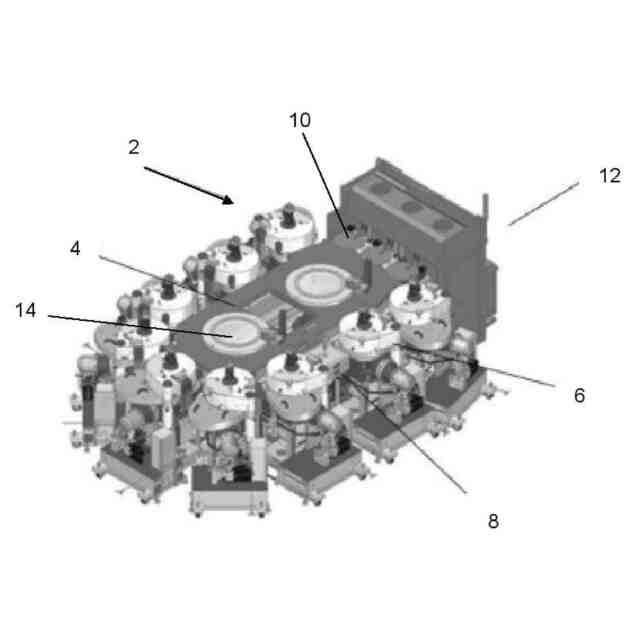
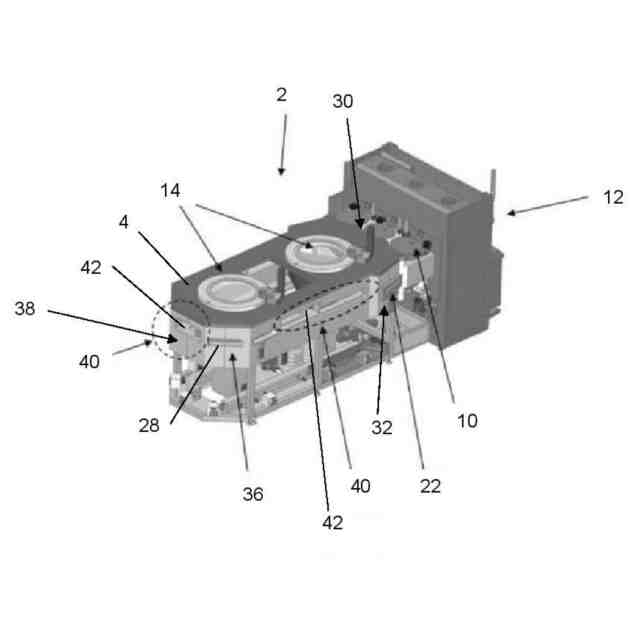
【解決手段】基板処理システム2は、真空条件下で基板を取り扱うための搬送真空チャンバ4を備え、それぞれの接続スロット28によって搬送真空チャンバ4に接続された少なくとも2つの基板モジュールと連通しており、少なくとも2つの基板モジュールは、少なくとも1つの基板を受け入れることができ、少なくとも2つの基板モジュールのうちの少なくとも1つは、基板処理モジュール6であり、搬送真空チャンバ4と真空連通している少なくとも2つのロードロックチャンバ10を備える。
【選択図】図1
特許請求の範囲
【請求項1】
基板処理システムであって、
真空条件下で基板を取り扱うための搬送真空チャンバであって、前記搬送真空チャンバは、それぞれの接続スロットによって前記搬送真空チャンバに接続された少なくとも2つの基板モジュールと連通しており、前記少なくとも2つの基板モジュールは、少なくとも1つの基板を受け入れることができ、前記少なくとも2つの基板モジュールのうちの少なくとも1つは、基板処理モジュールであり
前記搬送真空チャンバと真空連通している少なくとも2つのロードロックチャンバと、
を備え、
前記搬送真空チャンバは、真空条件下で前記少なくとも2つのロードロックチャンバと少なくとも1つの前記基板処理モジュールとの間で前記基板を搬送するように構成された前記搬送真空チャンバ内に配置された少なくとも2つの搬送ロボットを備え、前記少なくとも2つの搬送ロボットはそれぞれ、少なくとも5つの独立した軸に沿って並進または回転することができ、前記少なくとも2つの搬送ロボットはそれぞれ、前記少なくとも2つの基板モジュールのうちの少なくとも1つの共通基板モジュールから前記基板を配置および回収するように構成される、基板処理システム。
続きを表示(約 1,100 文字)
【請求項2】
前記少なくとも2つのロードロックチャンバは、前記基板処理システムへの前記基板の搬入および搬出を可能にするように構成された装置フロントエンドモジュール(EFEM)に接続されることを特徴とする請求項1に記載の基板処理システム。
【請求項3】
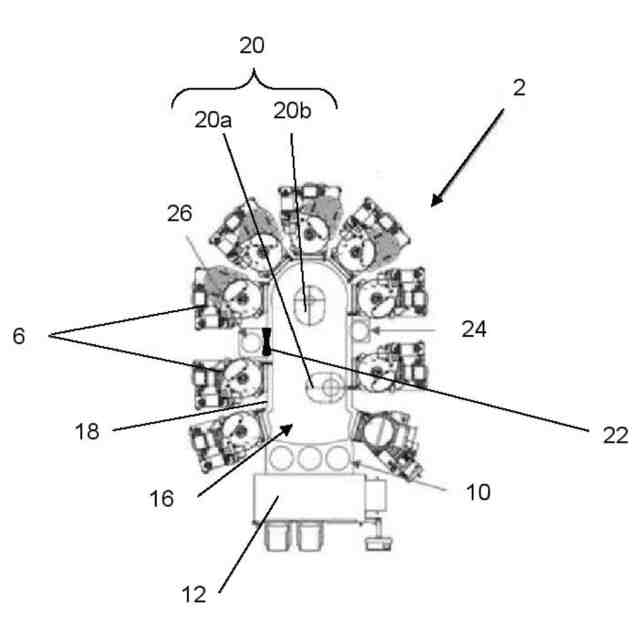
前記搬送真空チャンバは、複数のファセットを備え、各ファセットは、少なくとも1つの接続スロットを備え、前記少なくとも2つの基板モジュールおよび前記少なくとも2つのロードロックチャンバのそれぞれは、それぞれの接続スロットによって前記ファセットにおいて前記搬送真空チャンバに接続されることを特徴とする請求項1または請求項2に記載の基板処理システム。
【請求項4】
前記少なくとも2つのロードロックチャンバのそれぞれは、共通のロードロックファセットにおいて前記搬送真空チャンバに接続されることを特徴とする請求項3に記載の基板処理システム。
【請求項5】
前記少なくとも2つのロードロックチャンバは、3つのロードロックチャンバを含み、前記3つのロードロックチャンバのそれぞれは、前記ロードロックファセットにおいて前記搬送真空チャンバに接続されることを特徴とする請求項4に記載の基板処理システム。
【請求項6】
前記搬送真空チャンバは、前記ロードロックファセットに隣接する2つのファセットを備え、前記2つのファセットのそれぞれは、前記ロードロックファセットに向かって傾斜していることを特徴とする請求項4または請求項5に記載の基板処理システム。
【請求項7】
少なくとも1つのファセットは、調整可能な接続スロットを備えることを特徴とする請求項3~6のいずれかに記載の基板処理システム。
【請求項8】
3つのファセットは、それぞれ調整可能な接続スロットを備えることを特徴とする請求項7に記載の基板処理システム。
【請求項9】
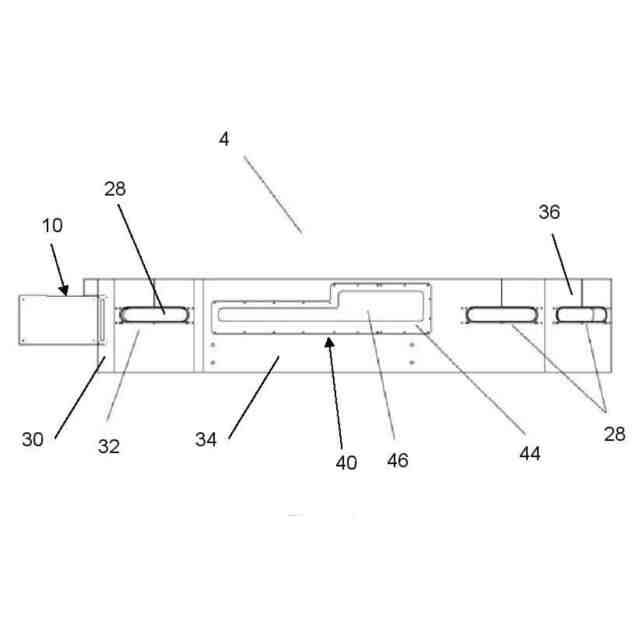
前記調整可能な接続スロットは、前記搬送真空チャンバのファセット内の少なくとも1つの開口部と、ブランキングプレートとを備え、前記ブランキングプレートは、少なくとも1つの開口を備え、前記ブランキングプレートは、前記少なくとも1つの開口が前記少なくとも1つの開口部の上に位置付けられるように、前記ファセットに取り外し可能に固定されることを特徴とする請求項7または請求項8に記載の基板処理システム。
【請求項10】
前記少なくとも2つのロードロックチャンバのうちの少なくとも1つは、少なくとも1つのロードロックチャンバ内の前記基板を加熱または冷却するように構成された温度制御手段を備えることを特徴とする請求項1~9のいずれかに記載の基板処理システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、基板処理システムに関する。また、本発明は、基板処理システムを用いて基板を処理する方法にも関する。
続きを表示(約 4,000 文字)
【背景技術】
【0002】
薄膜真空処理装置などの超高真空(UHV)基板処理装置では、1つのプロセスツールで多数のプロセスステップを実行することが標準的である。処理される基板、半導体ウェハ、ガラスパネルなどは、減圧下でプロセスツールの異なる部分で行われる様々な異なるステップを必要とすることがある。真空適合ロボットは、ツールを通してサブステートを移動させるために使用されることが多い。典型的なプロセスシーケンスは、基板が、大気装置フロントエンドモジュール(EFEM)からロードロックチャンバを通って少なくとも1つの搬送真空チャンバの中へ真空環境の中へ搬送され、続いて、種々の加熱および冷却動作を伴う一連の堆積またはエッチングステップが続くことを必要とし得る。潜在的なツール内計測ステーションはまた、基板上の膜または基板自体の様々な物理的特性を測定するために使用され得る。必要なプロセスシーケンスが完了すると、基板はロードロックチャンバを通ってEFEMに戻される。これらのプロセスステップの各々は、典型的には、特定の機能を実行するための少なくとも1つの専用モジュールと、プロセスツールを通して適時に基板を移動させるための搬送機構とを必要とする。半導体ウェハ製造プロセスにおけるプロセスツールのコスト・オブ・オーナーシップ(CoO)は、ツールの生産性(1時間当たりのウェハ数)、消耗品のコスト(1ウェハ当たりのコスト)、システムのフットプリント(面積)、およびツールのコストによって大きく決定される。PVDシステムなど、ウェハが予熱され、スパッタ洗浄され、その後超高真空環境で2~3回の堆積ステップが続くいくつかの連続プロセスステップがあるシステムでは、搬送システムは、ツールスループットを決定する際に重要な役割を果たすことができる。2つのロードロックチャンバおよび単一の双対称ロボットを有する八角形の輸送モジュールの場合、システムのスループットは、搬送チャンバによって収容され得るプロセスモジュールの数、この場合、最大6つのプロセスモジュールによって制限され得る。米国特許第5186718号で開示されている業界標準AMAT Enduraなどの代替システムでは、それぞれが搬送ロボットと、搬送チャンバ間のロードロックチャンバを通る内部搬送経路とを有する2つの搬送チャンバが、最大9つのプロセスモジュール位置を4つの前部搬送チャンバ上に、5つを後部搬送チャンバ上に提供することができる。前部搬送チャンバ上のモジュール位置のいくつかは、EFEMに近接しているため、比較的小さいモジュールしか収容できない。搬送チャンバが支持することができるプロセスモジュールの数は、モジュールサイズ、主に幅、ならびにモジュールアクセス要件およびタイプ、例えば、物理蒸着(PVD)、プラズマまたは化学エッチング、化学蒸着(CVD)、または原子層堆積(ALD)に依存する。異なるタイプのモジュールは、相互汚染問題を回避するために管理される必要がある異なる真空要件を有することができる。これは、典型的には、前方搬送チャンバおよび後方搬送チャンバ内で異なるレベルの真空を維持することによって管理される。しかしながら、このツイン搬送チャンバシステムにおけるハンドリングシーケンスは、第1の真空チャンバ内で処理されたウェハが、第2のロボットによってピックアップされ、次のプロセスステーションに移動する前に、第2のチャンバに入る前にロードロックチャンバ内に置かれ、平衡化される必要があるため、生産性を制限し得る。並列プロセスパスを用いて逐次プロセスを実行する場合、ハンドリング時間は、ツール生産性の制限要因となり得る。さらなる制限は、双対称ロボットを使用する場合のロードロックチャンバを有する搬送チャンバの幅である。従来のツイン搬送チャンバシステムは、チャンバの幅が広がることを回避するために2つのロードロックチャンバを使用し、チャンバ容積を増大させ、ひいてはツールフットプリントを増大させる。大量用途では、2つのロードロックチャンバのみを有することが、ツール生産性の制限要因となり得る。
【先行技術文献】
【特許文献】
【0003】
米国特許第5186718号
米国特許第8309374号
米国特許出願公開第2015/0071737号
米国特許出願公開第2008/0075563号
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、その実施形態の少なくともいくつかにおいて、上記の問題、要望およびニーズのいくつかに対処しようとするものである。特に、本発明の実施形態は、システムの設置面積を最小限に抑えながら、基板処理システムのスループット及び効率を改善しようとするものである。
【課題を解決するための手段】
【0005】
本発明の第1の態様によれば、基板処理システムが提供されることであって、以下を含む。
【0006】
真空条件下で基板を取り扱うための搬送真空チャンバであって、搬送真空チャンバは、それぞれの接続スロットによって搬送真空チャンバに接続された少なくとも2つの基板モジュールと連通しており、少なくとも2つの基板モジュールは、少なくとも1つの基板を受け入れることができ、少なくとも2つの基板モジュールのうちの少なくとも1つは、基板処理モジュールであり、少なくとも2つのロードロックチャンバは、搬送真空チャンバと真空連通しており、搬送真空チャンバは、真空条件下で少なくとも2つのロードロックチャンバと少なくとも1つの基板処理モジュールとの間で基板を搬送するように構成された搬送真空チャンバ内に配置された少なくとも2つの搬送ロボットを備え、少なくとも2つの搬送ロボットはそれぞれ、少なくとも5つの独立した軸に沿って並進または回転することができ、少なくとも2つの搬送ロボットはそれぞれ、少なくとも2つの基板モジュールのうちの少なくとも1つの共通基板モジュールから基板を配置および回収するように構成される。
【0007】
少なくとも2つの「5軸」搬送ロボットを単一の搬送真空チャンバ内に、少なくとも2つのロードロックチャンバおよび搬送真空チャンバに接続された少なくとも1つの共通基板モジュールとともに含むことによって、本発明者らは、比較的コンパクトなフットプリントを有する高生産性システムを生成することができ、スループットは、基板の輸送よりもむしろ、少なくとも1つの基板処理チャンバ内の基板のハンドリング時間によって主に制約されることを見出した。搬送ロボットの各々によってアクセス可能な少なくとも1つの共通基板モジュールは、追加の搬送真空チャンバまたはロードロックチャンバ、あるいは各搬送真空ロボットがアクセス可能な領域間で基板を搬送する他の手段の必要性を防ぎながら、搬送真空チャンバ自体が搬送ロボットのいずれかの経路または運動を妨げ得るいかなる構造またはモジュールも存在しないことも保証する。基板搬送時間の短縮およびシステムスループットの向上を可能にする。加えて、「5軸」ロボットを使用することによって、チャンバの幅は、主に、ロードロックチャンバのサイズおよび数によって決定付けられ、ロードロックチャンバは、「5軸」ロボットが、双対称ロボットとは異なり、半径方向移動に限定されないため、より近接して位置することができる。これは、基板処理システムの幅、したがってフットプリントを縮小することを可能にする。
【0008】
各接続スロットは、搬送真空チャンバの外部と内部との間の搬送真空チャンバ内の開口部を備えることができる。各接続スロットは、搬送真空チャンバの内部を搬送真空チャンバの外部から隔離するように構成される、それぞれの接続スロット弁を備えることができ、それによって、真空が搬送真空チャンバの内側に維持され得、接続スロット弁によって搬送真空チャンバに接続される基板モジュールが搬送真空チャンバから隔離され得ることを確実にする。搬送真空チャンバは、使用時に、3×10
-7
Torr未満、任意選択で1×10
-7
Torr未満、さらに任意選択で約9×10
-8
Torrの圧力を有する真空を維持するように構成することができる。搬送真空チャンバ内の真空は、真空ポンプ等の当技術分野で公知の任意の方法によって維持することができる。
【0009】
少なくとも2つのロードロックチャンバは、基板が基板処理システムにロードされ、基板処理システムからアンロードされることを可能にするように構成された装置フロントエンドモジュール(EFEM)に接続することができる。EFEMは、大気条件下で少なくとも2つのロードロックチャンバとEFEMの外部との間で基板を搬送するように構成された第3の搬送ロボットを備えることができる。
【0010】
少なくとも1つの基板処理モジュールは、物理蒸着(PVD)、プラズマまたは化学エッチングまたは堆積、化学蒸着(CVD)または原子層堆積(ALD)プロセスを少なくとも1つの基板上に行うように構成された基板モジュールを備えることができる。基板処理モジュールではない少なくとも2つの基板モジュールのうちの少なくとも1つの基板モジュールは、マルチまたはシングル基板冷却モジュール、マルチまたはシングル基板バッファモジュール、予熱モジュール、および/または計測モジュールなどの補助基板モジュールとすることができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
電波吸収体
18日前
個人
テーブルタップ
15日前
キヤノン株式会社
電子機器
15日前
三洋化成工業株式会社
軟磁性材料
5日前
株式会社GSユアサ
蓄電装置
15日前
株式会社GSユアサ
蓄電装置
15日前
株式会社ダイヘン
碍子
20日前
古河電池株式会社
制御弁式鉛蓄電池
11日前
株式会社ヨコオ
同軸コネクタ
11日前
個人
六角形パネル展開アレーアンテナ
15日前
日本特殊陶業株式会社
保持装置
5日前
株式会社ユーシン
スイッチ装置
15日前
株式会社ユーシン
スイッチ装置
15日前
株式会社半導体エネルギー研究所
電池
4日前
住友電装株式会社
コネクタ
11日前
三洲電線株式会社
撚線導体
5日前
ローム株式会社
半導体装置
15日前
TDK株式会社
コイル部品
11日前
イビデン株式会社
プリント配線板
18日前
株式会社デンソー
半導体装置
15日前
株式会社村田製作所
二次電池
18日前
富士電機株式会社
半導体装置
15日前
日産自動車株式会社
電子機器
18日前
株式会社デンソー
半導体装置
15日前
三洋化成工業株式会社
リチウムイオン電池
5日前
大和電器株式会社
コンセント
11日前
ニチコン株式会社
コンデンサ
11日前
日本圧着端子製造株式会社
コネクタ
19日前
太陽誘電株式会社
コイル部品
15日前
オムロン株式会社
リード線整列治具
15日前
TDK株式会社
電子部品
11日前
個人
ユニバーサルデザインコンセントプラグ
15日前
トヨタ自動車株式会社
非水系二次電池
18日前
株式会社村田製作所
電池パック
20日前
株式会社ダイフク
搬送車
18日前
河村電器産業株式会社
速結端子
18日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ