TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025010966
公報種別
公開特許公報(A)
公開日
2025-01-23
出願番号
2023113303
出願日
2023-07-10
発明の名称
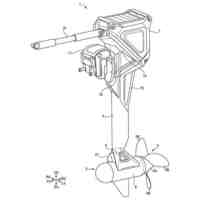
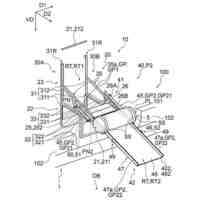
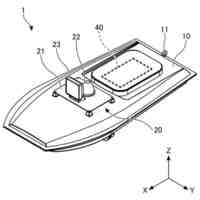
船舶推進システムおよび船舶
出願人
ヤマハ発動機株式会社
代理人
個人
主分類
B63H
21/21 20060101AFI20250116BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
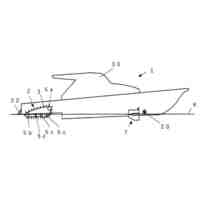
【課題】波浪時において船体の安定性を向上させて乗り心地を向上させることが可能な船舶推進システムおよび船舶を提供する。
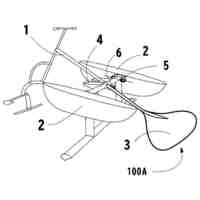
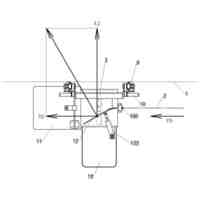
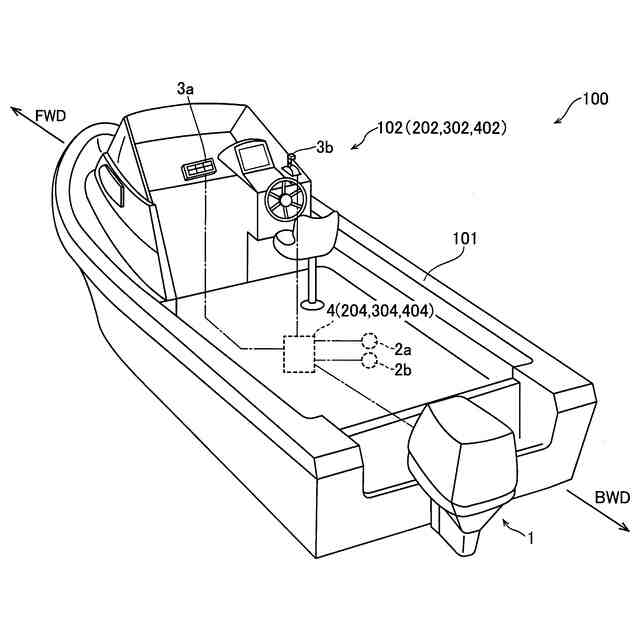
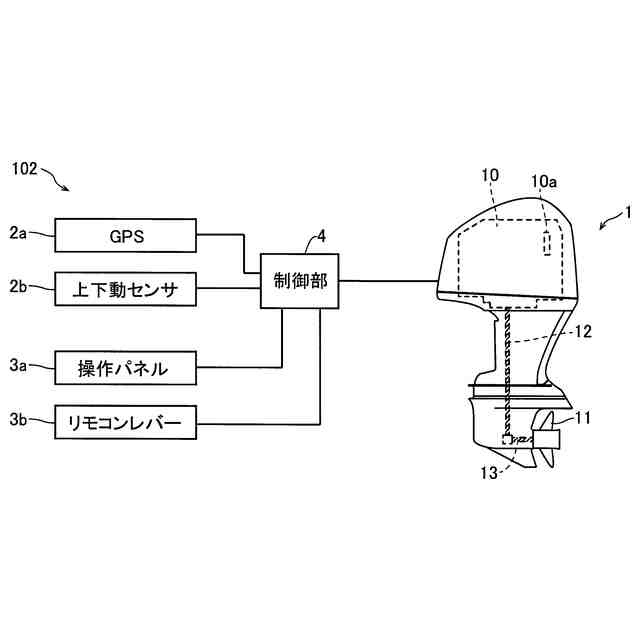
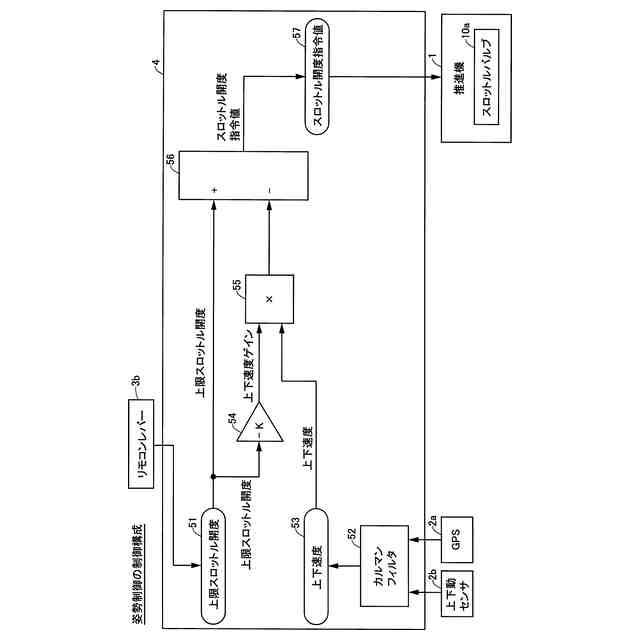
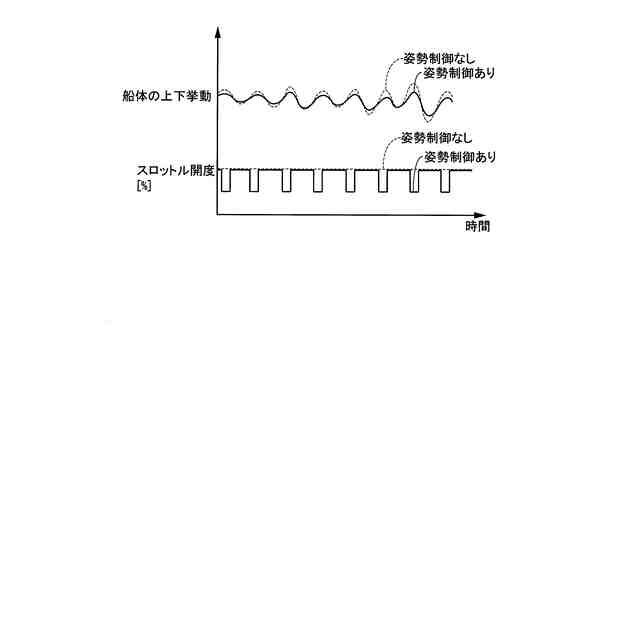
【解決手段】この船舶推進システム102は、船体101に設けられた推進機1と、船体101の上下速度および上下加速度の少なくとも一方を計測する上下動センサ2bと、波浪時において上下動センサ2bの計測結果に基づいて、各波を乗り越えるタイミング毎に船速を一時的に小さくして船体101の上下の姿勢変化を低減する姿勢制御を含む波浪制御を行う制御部4と、を備え、制御部4は、波浪制御において、少なくとも上下動センサ2bの計測結果に基づいて、船体101に対する波の状態が向かい波と追い波とのいずれであるかを判断する波向き判定を行うように構成され、波向き判定により向かい波と判断した場合には、姿勢制御を行い、波向き判定により追い波と判断した場合には、姿勢制御を行わないように構成されている。
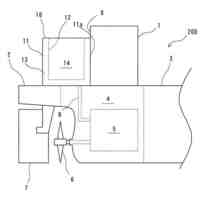
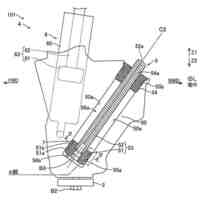
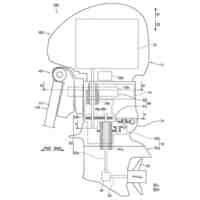
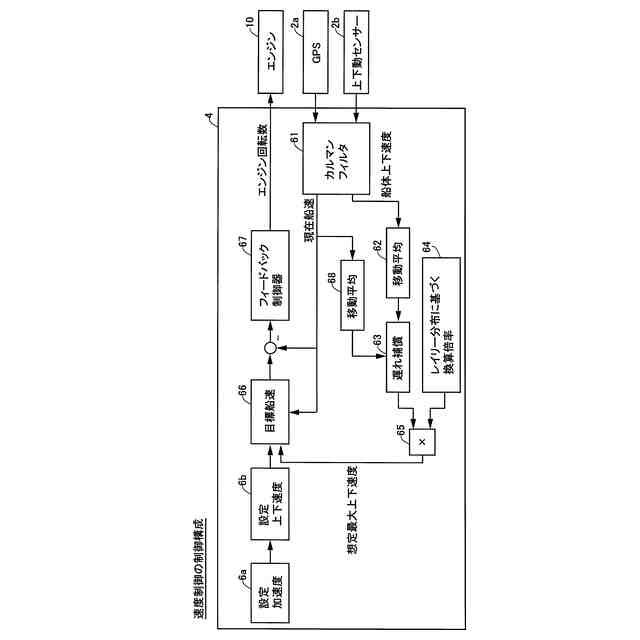
【選択図】図6
特許請求の範囲
【請求項1】
船体に設けられた推進機と、
前記船体の上下速度および上下加速度の少なくとも一方を計測する上下動センサと、
前記推進機の駆動を制御するように構成され、波浪時において前記上下動センサの計測結果に基づいて、各波を乗り越えるタイミング毎に船速を一時的に小さくして前記船体の上下の姿勢変化を低減する姿勢制御を含む波浪制御を行う制御部と、を備え、
前記制御部は、
前記波浪制御において、少なくとも前記上下動センサの計測結果に基づいて、前記船体に対する波の状態が向かい波と追い波とのいずれであるかを判断する波向き判定を行うように構成され、
前記波向き判定により前記向かい波と判断した場合には、前記姿勢制御を行い、
前記波向き判定により前記追い波と判断した場合には、前記姿勢制御を行わないように構成されている、船舶推進システム。
続きを表示(約 1,300 文字)
【請求項2】
前記制御部は、前記波浪制御に含まれる制御であり、前記船速の目標値である目標船速となるように前記船速を調整する速度制御を、前記向かい波および前記追い波のいずれの場合でも行うように構成されている、請求項1に記載の船舶推進システム。
【請求項3】
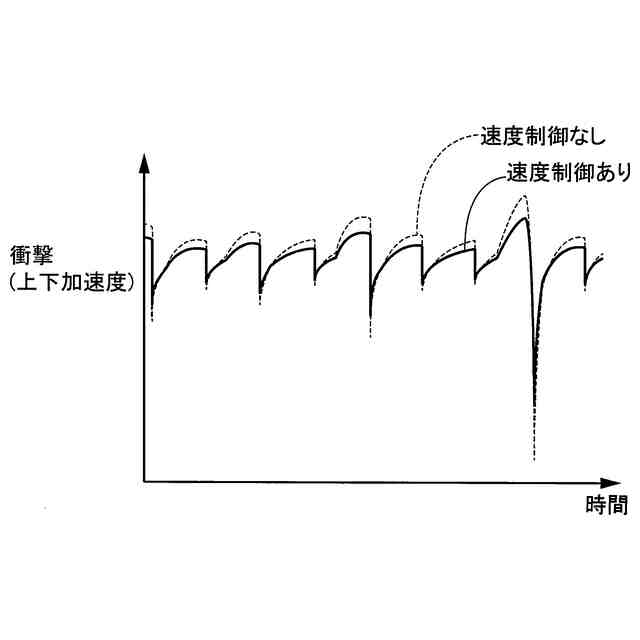
前記速度制御は、前記船速を調整して各波を乗り越える際の衝撃を低減する制御であり、
前記制御部は、前記波向き判定の結果が前記向かい波および前記追い波のいずれの場合であっても、前記速度制御を行うように構成されている、請求項2に記載の船舶推進システム。
【請求項4】
前記制御部は、前記速度制御において、少なくとも前記船体の上下の加減速を低減するための前記目標船速に基づいて、前記波向き判定を行うように構成されている、請求項2に記載の船舶推進システム。
【請求項5】
前記目標船速は、実船速と、前記船速の目標値との差が縮小されるように、船速の変化量に所定の制限を設けた制限目標船速を含む、請求項4に記載の船舶推進システム。
【請求項6】
前記制御部は、
前記波向き判定において、前記目標船速と前記速度制御の開始時の船速との差である判定船速差が所定の波向き判定閾値よりも大きいと判断した場合には、前記向かい波と判断して前記姿勢制御を行い、
前記判定船速差が前記波向き判定閾値以下であると判断した場合には、前記追い波と判断して前記姿勢制御を行わないように構成されている、請求項2に記載の船舶推進システム。
【請求項7】
前記速度制御では、前記目標船速に向けて変化する実船速の変化率に上限値が設けられており、
前記制御部は、前記目標船速と実船速との差が第1閾値以上である場合には、前記変化率の前記上限値を大きくする制御を行う、請求項2に記載の船舶推進システム。
【請求項8】
前記制御部は、前記波向き判定において前記向かい波と判断されている場合であっても、前記速度制御を行うとともに前記姿勢制御を行っていない状態において、前記上下動センサの計測結果に基づいて、前記船体の上下速度または上下加速度が所定の第2閾値以上であると判断した場合には、前記速度制御に加えて、前記姿勢制御を行うように構成されている、請求項2に記載の船舶推進システム。
【請求項9】
前記制御部は、
前記速度制御において、前記船体の上下速度または上下加速度の移動平均値に基づいて、前記船速を調整して各波を乗り越える際の衝撃を低減するように構成され、
前記移動平均値に基づいて前記目標船速を設定して、前記波向き判定を行うように構成されている、請求項3に記載の船舶推進システム。
【請求項10】
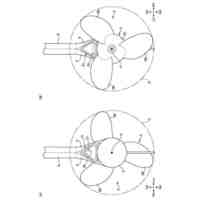
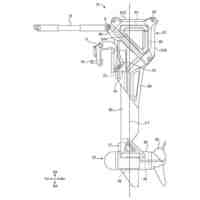
前記推進機は、推力を発生させる駆動源であるエンジンおよび電気モータの少なくとも一方を含み、
前記制御部は、エンジンまたは前記電気モータの出力を小さくして、前記船速を小さくすることにより前記姿勢制御を行う、請求項1に記載の船舶推進システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この発明は、推進速度を制御する船舶推進システムおよび船舶に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、波の状態に合わせて駆動が制御される推進機を備える船舶が知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、船外機と、船外機のエンジンの回転速度を検出するエンジン回転速度センサと、制御部とを備える船舶が開示されている。この制御部は、エンジン回転速度センサの検出結果に基づいて、波から船体が受ける衝撃を間接的に示すエンジンへの波の負荷量を検出して、負荷量に応じてスロットル開度を修正するように構成されている。
【先行技術文献】
【特許文献】
【0004】
特開2003-97309号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1に記載の船舶では、波の状態として、単に船体が受ける衝撃の大小を考慮して制御を行っているだけであり、波の状態に合わせた適切な制御が十分にはなされておらず、船体の安定性が十分に確保されているとはいえない。そこで、波浪時において船体の安定性を向上させて乗り心地を向上させることが望まれている。
【0006】
この発明は、上記のような課題を解決するためになされたものであり、この発明の1つの目的は、波浪時において船体の安定性を向上させて乗り心地を向上させることが可能な船舶推進システムおよび船舶を提供することである。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、この発明の第1の局面による船舶推進システムは、船体に設けられた推進機と、船体の上下速度および上下加速度の少なくとも一方を計測する上下動センサと、推進機の駆動を制御するように構成され、波浪時において上下動センサの計測結果に基づいて、各波を乗り越えるタイミング毎に船速を一時的に小さくして船体の上下の姿勢変化を低減する姿勢制御を含む波浪制御を行う制御部と、を備え、制御部は、波浪制御において、少なくとも上下動センサの計測結果に基づいて、船体に対する波の状態が向かい波と追い波とのいずれであるかを判断する波向き判定を行うように構成され、波向き判定により向かい波と判断した場合には、姿勢制御を行い、波向き判定により追い波と判断した場合には、姿勢制御を行わないように構成されている。
【0008】
この第1の局面による船舶推進システムでは、上記のように、波浪時において上下動センサの計測結果に基づいて、各波を乗り越えるタイミング毎に船速を一時的に小さくして船体の上下の姿勢変化を低減する姿勢制御を含む波浪制御を行う制御部を設け、制御部を、波浪制御において、少なくとも上下動センサの計測結果に基づいて、船体に対する波の状態が向かい波と追い波とのいずれであるかを判断する波向き判定を行うように構成し、波向き判定により向かい波と判断した場合には、姿勢制御を行い、波向き判定により追い波と判断した場合には、姿勢制御を行わないように構成する。これによって、追い波と向かい波とを区別して、船体の衝撃が大きくなりやすい向かい波の場合に各波を乗り越えるタイミング毎に船速を一時的に小さくして船体を安定させることができる。また、船速を小さくすると船体が不安定になりやすい追い波の場合に各波を乗り越えるタイミング毎に船速が一時的に小さくなることを回避することができる。したがって、従来考慮されていなかった波の向きを考慮して、波の向きに合わせた制御を行うことができるので、波浪時において船体の安定性を向上させて乗り心地を向上させることができる。また、姿勢制御によって、向かい波において、各波を乗り越えるタイミング毎に船速を一時的に小さくすることができるので、船舶が勢いよく波を乗り越えることなどを抑制することができる。
【0009】
上記第1の局面による船舶推進システムにおいて、好ましくは、制御部は、波浪制御に含まれる制御であり、船速の目標値である目標船速となるように船速を調整する速度制御を、向かい波および追い波のいずれの場合でも行うように構成されている。このように構成すれば、向かい波の場合に姿勢制御が行われるだけでなく、向かい波および追い波の両方において速度制御を行って、波浪時において速度を抑えることができるので、波浪時において船体の安定性をより向上させて乗り心地をより向上させることができる。
【0010】
この場合、好ましくは、速度制御は、船速を調整して各波を乗り越える際の衝撃を低減する制御であり、制御部は、波向き判定の結果が向かい波および追い波のいずれの場合であっても、速度制御を行うように構成されている。このように構成すれば、向かい波の場合に姿勢制御が行われるだけでなく、向かい波および追い波の両方において速度制御を行うことによって、衝撃をより低減することができる。その結果、波浪時において船体の安定性をより向上させて乗り心地をより一層向上させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
川下り用船
4か月前
個人
発電船
5か月前
個人
シーアンカー
6か月前
個人
船用横揺防止具
1か月前
個人
補助機構
23日前
個人
コンパクトシティ船
22日前
小柳建設株式会社
台船
7か月前
個人
渦流動力推進構造
17日前
ウラカミ合同会社
曳航ロボット
8か月前
炎重工株式会社
浮標
2か月前
炎重工株式会社
浮標
2か月前
個人
水陸両用移動装置
7か月前
炎重工株式会社
移動体
5か月前
個人
船舶
2か月前
個人
スクリュープロペラ
12日前
株式会社フルトン
水中捕捉装置
24日前
オーケー工業株式会社
係留フック
1か月前
ダイハツ工業株式会社
ジャケット
9か月前
個人
回転式による流体流出防止タンカー
23日前
ヤマハ発動機株式会社
船外機
2か月前
トヨタ自動車株式会社
ガンネル治具
10か月前
個人
キャタピラ推進式高速船
11か月前
誠加興業股分有限公司
呼吸用マスク
8か月前
常石造船株式会社
メタノール燃料船
3か月前
株式会社テラサン
位置保持システム
6か月前
スズキ株式会社
船外機
10日前
スズキ株式会社
船外機
10日前
川崎汽船株式会社
ドライアイス輸送船
9か月前
藤倉コンポジット株式会社
架台
3か月前
株式会社神戸タフ興産
船舶の甲板構造
4か月前
炎重工株式会社
自律航行浮遊体
2か月前
スズキ株式会社
電動船外機
10日前
株式会社大林組
浮体式構造物の設置方法
1か月前
株式会社大林組
水中潜行システム
2か月前
ヤマハ発動機株式会社
船外機および船舶
2か月前
ヤマハ発動機株式会社
船外機および船舶
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ