TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025010483
公報種別
公開特許公報(A)
公開日
2025-01-21
出願番号
2024068162
出願日
2024-04-19
発明の名称
車両制御方法、車両制御プログラム、及び車両制御システム
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/622 20240101AFI20250110BHJP(制御;調整)
要約
【課題】作業車両の作業効率の低下を防ぎつつ、作業車両に障害物に対する適切な対処処理を実行させることが可能な車両制御方法、車両制御プログラム、及び車両制御システムを提供すること。
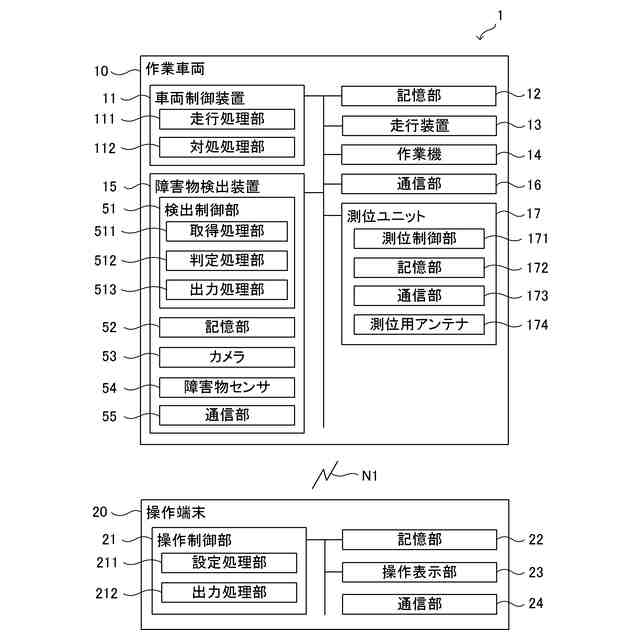
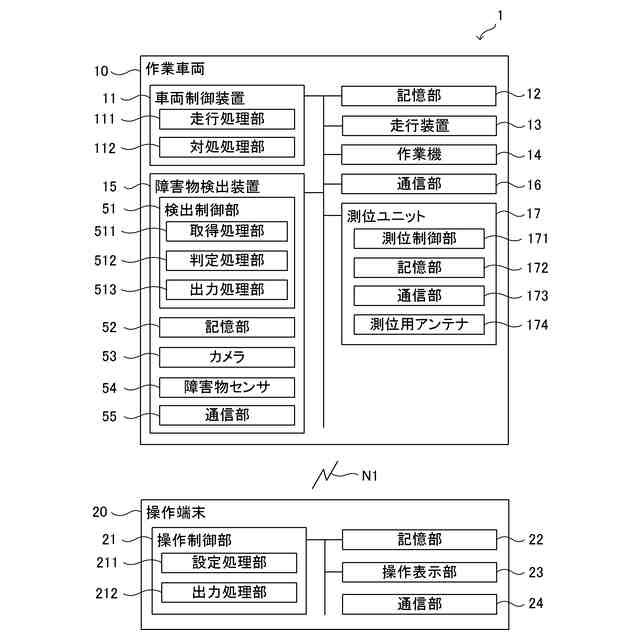
【解決手段】取得処理部511は、作業車両10が目標経路に従って自動走行する場合に、障害物センサ54により検出される検出対象までの距離の距離情報と、カメラ53により撮像される前記検出対象の撮像画像の画像情報とを取得する。判定処理部512は、前記画像情報に基づいて前記検出対象の種別を判定する。対処処理部112は、前記検出対象の種別及び前記距離情報に応じた対処処理を作業車両10に実行させる。
【選択図】図1
特許請求の範囲
【請求項1】
作業車両が目標経路に従って自動走行する場合に、検出部により検出される検出対象までの距離の距離情報を取得することと、
撮像部により撮像される前記検出対象の撮像画像の画像情報を取得することと、
前記画像情報に基づいて前記検出対象の種別を判定することと、
前記検出対象の種別及び前記距離情報に応じた対処処理を前記作業車両に実行させることと、
を実行する車両制御方法。
続きを表示(約 830 文字)
【請求項2】
前記画像情報に基づいて前記検出対象の種別の尤度を算出し、算出した尤度に基づいて前記対処処理を前記作業車両に実行させる、
請求項1に記載の車両制御方法。
【請求項3】
前記画像情報及び前記距離情報に基づいて前記検出対象の種別の尤度を算出し、算出した尤度に基づいて前記対処処理を前記作業車両に実行させる、
請求項1に記載の車両制御方法。
【請求項4】
前記距離が短いほど前記尤度が高くなるように、前記尤度を算出する、
請求項3に記載の車両制御方法。
【請求項5】
前記尤度が閾値を超える場合に前記対処処理を前記作業車両に実行させる、
請求項2に記載の車両制御方法。
【請求項6】
前記閾値は、前記距離が短いほど小さい値に設定される、
請求項5に記載の車両制御方法。
【請求項7】
前記閾値は、前記対処処理の内容に応じて異なる値に設定される、
請求項6に記載の車両制御方法。
【請求項8】
前記対処処理が自動走行中の前記作業車両を停止させる処理の場合に、前記閾値は第1閾値に設定され、
前記対処処理が自動走行中の前記作業車両を減速させる処理又は前記作業車両から警告情報を報知させる処理の場合に、前記閾値は前記第1閾値よりも大きい第2閾値に設定される、
請求項7に記載の車両制御方法。
【請求項9】
前記対処処理を実行させ易くする又は実行させ難くするための設定情報である感度を設定可能であり、
前記閾値は、さらに前記感度に応じて設定される、
請求項6~8のいずれかに記載の車両制御方法。
【請求項10】
前記感度は、ユーザーの操作に応じて設定される、
請求項9に記載の車両制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、障害物等の検出対象を検出した場合の作業車両の動作を制御する技術に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、赤外線センサ、超音波センサなどの障害物センサを搭載し、自動走行中に検出範囲内の検出対象を検出可能な作業車両が知られている(例えば特許文献1参照)。前記作業車両は、検出対象が障害物である場合に、障害物との衝突を回避する回避制御を実行する。
【先行技術文献】
【特許文献】
【0003】
特開2021-65115号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、従来の技術では、検出対象までの距離に基づいて障害物の有無を判定しているため、例えば検出対象が、作業車両が回避動作を行う必要のない物体(刈取対象物、収穫対象物などの作業対象物)であっても、検出対象までの距離が閾値以下になると作業車両に回避動作を実行させてしまう。このため、作業車両の作業効率が低下する問題が生じる。
【0005】
本発明の目的は、作業車両の作業効率の低下を防ぎつつ、作業車両に障害物に対する適切な対処処理を実行させることが可能な車両制御方法、車両制御プログラム、及び車両制御システムを提供することにある。
【課題を解決するための手段】
【0006】
本発明に係る車両制御方法は、作業車両が目標経路に従って自動走行する場合に、検出部により検出される検出対象までの距離の距離情報を取得することと、撮像部により撮像される前記検出対象の撮像画像の画像情報を取得することと、前記画像情報に基づいて前記検出対象の種別を判定することと、前記検出対象の種別及び前記距離情報に応じた対処処理を前記作業車両に実行させることと、を実行する方法である。
【0007】
本発明に係る車両制御プログラムは、作業車両が目標経路に従って自動走行する場合に、検出部により検出される検出対象までの距離の距離情報を取得することと、撮像部により撮像される前記検出対象の撮像画像の画像情報を取得することと、前記画像情報に基づいて前記検出対象の種別を判定することと、前記検出対象の種別及び前記距離情報に応じた対処処理を前記作業車両に実行させることと、を一又は複数のプロセッサーに実行させるためのプログラムである。
【0008】
本発明に係る車両制御システムは、取得処理部と判定処理部と対処処理部とを備える。前記取得処理部は、作業車両が目標経路に従って自動走行する場合に、検出部により検出される検出対象までの距離の距離情報と、撮像部により撮像される前記検出対象の撮像画像の画像情報とを取得する。前記判定処理部は、前記画像情報に基づいて前記検出対象の種別を判定する。前記対処処理部は、前記検出対象の種別及び前記距離情報に応じた対処処理を前記作業車両に実行させる。
【発明の効果】
【0009】
本発明によれば、作業車両の作業効率の低下を防ぎつつ、作業車両に障害物に対する適切な対処処理を実行させることが可能な車両制御方法、車両制御プログラム、及び車両制御システムを提供することができる。
【図面の簡単な説明】
【0010】
図1は、本発明の実施形態に係る自動走行システムの構成を示すブロック図である。
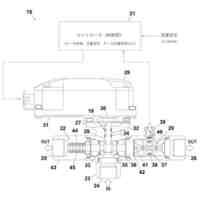
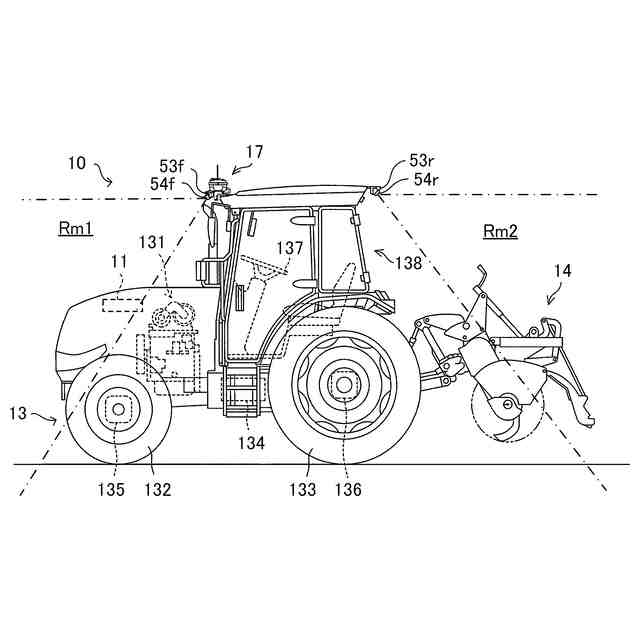
図2は、本発明の実施形態に係る作業車両の一例を示す外観図である。
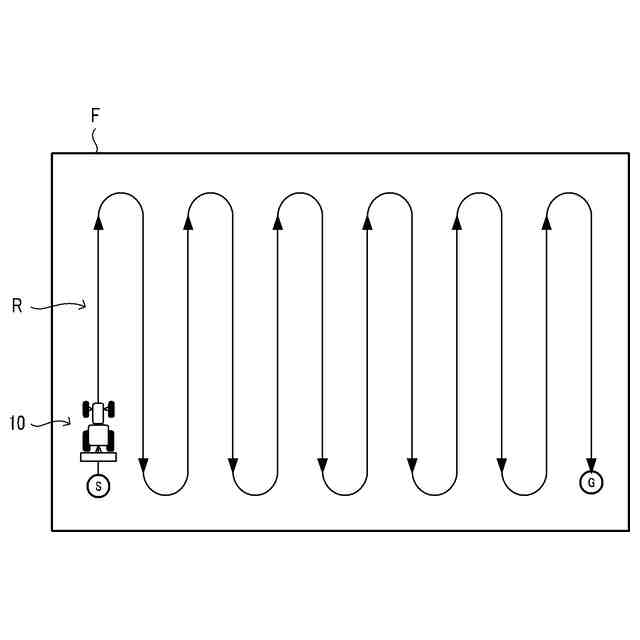
図3は、本発明の実施形態に係る作業車両の走行経路の一例を示す図である。
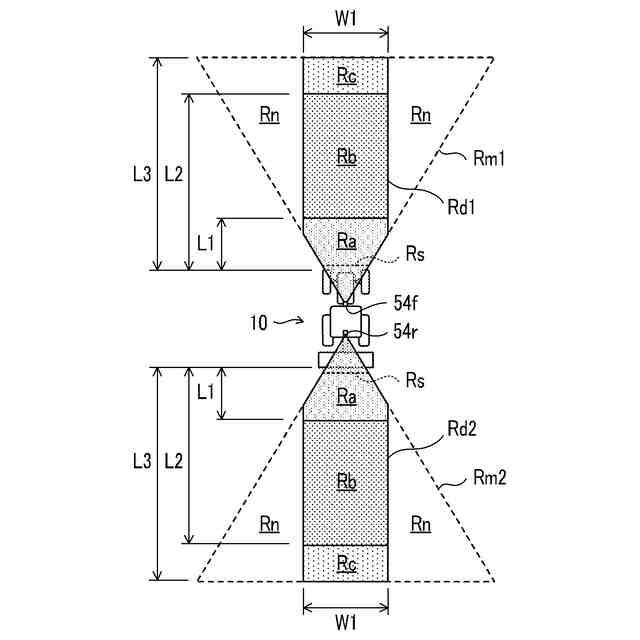
図4は、本発明の実施形態に係る作業車両に設けられる障害物センサの検知範囲の一例を示す図である。
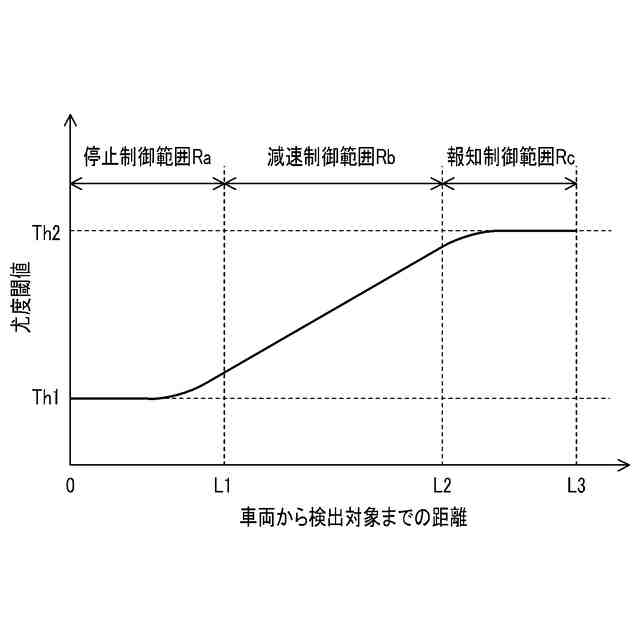
図5は、本発明の実施形態に係る自動走行システムにおいて利用される尤度閾値の一例を示す図である。
図6は、本発明の実施形態に係る作業車両において実行される対処処理の一例を示す図である。
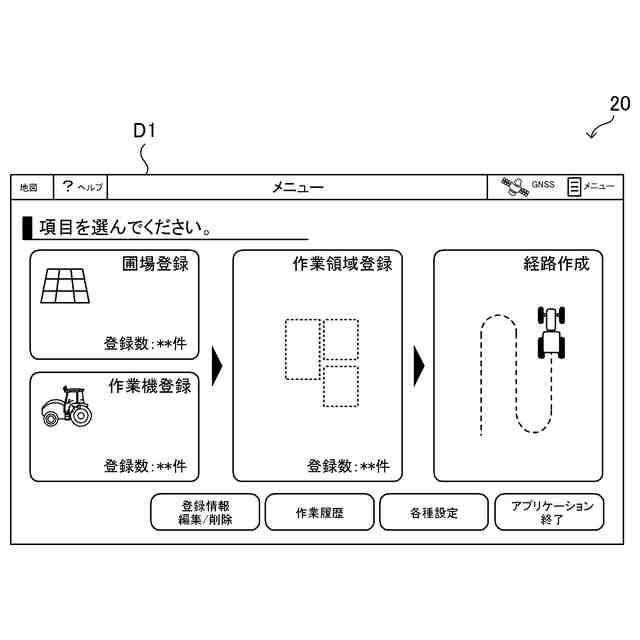
図7は、本発明の実施形態に係る操作端末に表示されるメニュー画面の一例を示す図である。
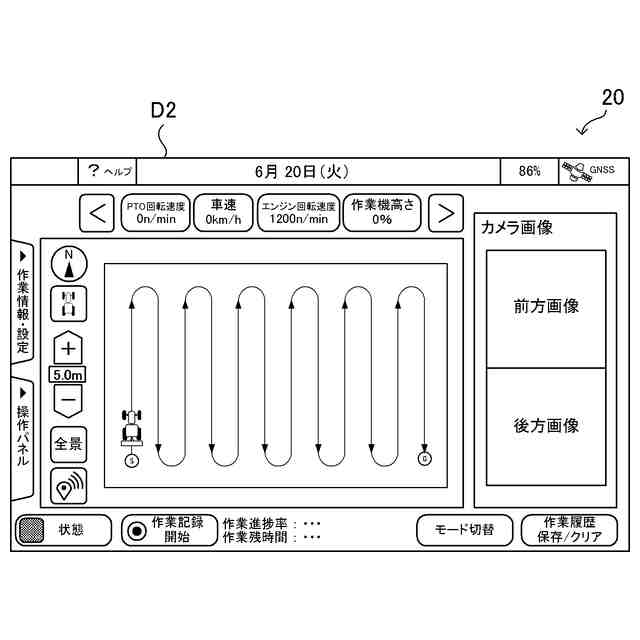
図8は、本発明の実施形態に係る操作端末に表示される走行画面の一例を示す図である。
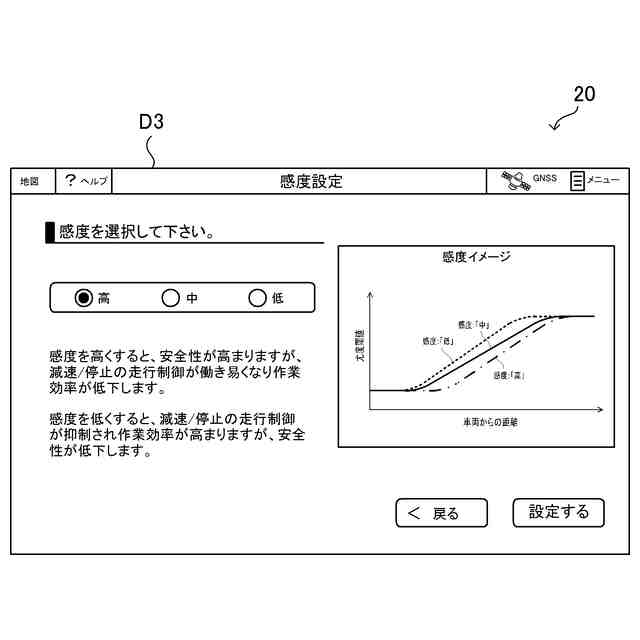
図9は、本発明の実施形態に係る操作端末に表示される感度設定画面の一例を示す図である。
図10Aは、本発明の実施形態に係る自動走行システムにおいて利用される感度に応じて尤度閾値の一例を示す図である。
図10Bは、本発明の実施形態に係る自動走行システムにおいて利用される感度に応じて尤度閾値の一例を示す図である。
図11は、本発明の実施形態に係る操作端末に表示される制御対象設定画面の一例を示す図である。
図12は、本発明の実施形態に係る自動走行システムによって実行される自動走行処理の手順の一例を示すフローチャートである。
図13Aは、本発明の実施形態に係る自動走行システムにおいて利用される尤度閾値の他の例を示す図である。
図13Bは、本発明の実施形態に係る自動走行システムにおいて利用される尤度閾値の他の例を示す図である。
図13Cは、本発明の実施形態に係る自動走行システムにおいて利用される尤度閾値の他の例を示す図である。
図14は、本発明の実施形態に係る操作端末に表示される監視モード設定画面の一例を示す図である。
図15は、本発明の実施形態に係る操作端末に表示される作業モード設定画面の一例を示す図である。
図16は、本発明の実施形態に係る操作端末に表示される作業モード設定画面の一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
2か月前
個人
無人作業システム
10日前
ugo株式会社
移動体
2か月前
アズビル株式会社
制御装置
3日前
村田機械株式会社
産業機械
24日前
株式会社ダイヘン
移動体
2か月前
株式会社ダイヘン
移動体
2か月前
神港テクノス株式会社
制御装置
2か月前
コフロック株式会社
流量制御装置
4日前
トヨタ自動車株式会社
自律移動体
24日前
トヨタ自動車株式会社
自律移動体
2か月前
トヨタ自動車株式会社
配送システム
2か月前
株式会社丸和製作所
入力機器
3日前
株式会社クボタ
作業車
24日前
トヨタ自動車株式会社
搬送ロボット
3か月前
アズビル株式会社
パラメータ調整装置
1か月前
株式会社明電舎
車両
24日前
株式会社フジキン
流体制御装置
2か月前
株式会社フジキン
流量制御装置
3日前
トヨタ自動車株式会社
位置推定システム
2か月前
株式会社ダイフク
搬送設備
11日前
トヨタ自動車株式会社
ロボットシステム
1か月前
トヨタ自動車株式会社
ロボットシステム
24日前
株式会社ダイフク
搬送設備
2か月前
株式会社村田製作所
温度補償回路
10日前
トヨタ自動車株式会社
自律移動システム
2か月前
株式会社FUJI
工作機械の操作システム
2か月前
株式会社ダイフク
物品搬送設備
17日前
株式会社ダイフク
物品搬送設備
2か月前
キヤノン株式会社
情報処理装置
1か月前
株式会社ダイフク
物品搬送設備
11日前
ローム株式会社
電源回路
2か月前
ローム株式会社
電源回路
1か月前
株式会社ダイフク
物品搬送設備
11日前
東フロコーポレーション株式会社
流量制御装置
1か月前
村田機械株式会社
搬送車システム
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ