TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025009739
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2023223214
出願日
2023-12-28
発明の名称
制御装置、およびステアリング装置
出願人
ニデック株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B62D
6/00 20060101AFI20250109BHJP(鉄道以外の路面車両)
要約
【課題】ステアリング装置における操舵性能を向上できる制御装置、および制御装置を備えるステアリング装置を提供する。
【解決手段】操舵者が操舵するハンドルを有する操舵機構と、第1転舵輪および第2転舵輪を有する転舵機構と、転舵機構を駆動する転舵側モータと、を備え、車両に搭載されるステアバイワイヤ方式のステアリング装置に搭載される制御装置であって、転舵側モータを含む制御対象を制御する転舵側制御部を備える。転舵側制御部は、制御対象に入力される入力トルクを補正する補正トルクを、制御対象の出力と制御対象の構成に基づくノミナルモデルとに基づいて生成するモデルフォロイング制御部を有する。モデルフォロイング制御部は、制御対象とノミナルモデルとのモデル化誤差に対する相補感度関数のゲイン特性におけるゲインが略1である周波数帯域において、制御対象の伝達関数がノミナルモデルの伝達関数に拘束されるように構成されている。
【選択図】図1
特許請求の範囲
【請求項1】
操舵者が操舵するハンドルを有する操舵機構と、第1転舵輪および第2転舵輪を有する転舵機構と、前記転舵機構を駆動する転舵側モータと、を備え、車両に搭載されるステアバイワイヤ方式のステアリング装置に搭載される制御装置であって、
前記転舵側モータを含む制御対象を制御する転舵側制御部を備え、
前記転舵側制御部は、前記制御対象に入力される入力トルクを補正する補正トルクを、前記制御対象の出力と前記制御対象の構成に基づくノミナルモデルとに基づいて生成するモデルフォロイング制御部を有し、
前記モデルフォロイング制御部は、前記制御対象と前記ノミナルモデルとのモデル化誤差に対する相補感度関数のゲイン特性におけるゲインが略1である周波数帯域において、前記制御対象の伝達関数が前記ノミナルモデルの伝達関数に拘束されるように構成されている、制御装置。
続きを表示(約 2,900 文字)
【請求項2】
前記ノミナルモデルの伝達関数は、前記入力トルクに対する前記転舵側モータの出力角度の比である機械的コンプライアンスの目標値に相当する伝達関数である、請求項1に記載の制御装置。
【請求項3】
前記転舵側モータは、
第1転舵側モータと、
第2転舵側モータと、
を含み、
前記転舵側制御部は、
前記第1転舵側モータを含む第1制御対象を制御する第1転舵側制御部と、
前記第2転舵側モータを含む第2制御対象を制御する第2転舵側制御部と、
を含み、
前記第1転舵側モータが前記転舵機構を駆動することに起因する第1干渉トルクが前記第2制御対象に加えられ、
前記第2転舵側モータが前記転舵機構を駆動することに起因する第2干渉トルクが前記第1制御対象に加えられ、
前記第1転舵側制御部は、前記第1制御対象に入力される第1入力トルクを補正する補正トルクを、前記第1制御対象の出力と前記第1制御対象の構成に基づく第1ノミナルモデルとに基づいて生成する第1モデルフォロイング制御部を有し、
前記第2転舵側制御部は、前記第2制御対象に入力される第2入力トルクを補正する補正トルクを、前記第2制御対象の出力と前記第2制御対象の構成に基づく第2ノミナルモデルとに基づいて生成する第2モデルフォロイング制御部を有し、
前記第1モデルフォロイング制御部は、前記第1制御対象と前記第1ノミナルモデルとのモデル化誤差に対する相補感度関数のゲイン特性におけるゲインが略1である周波数帯域において、前記第1制御対象の伝達関数が前記第1ノミナルモデルの伝達関数に拘束されるように構成され、
前記第2モデルフォロイング制御部は、前記第2制御対象と前記第2ノミナルモデルとのモデル化誤差に対する相補感度関数のゲイン特性におけるゲインが略1である周波数帯域において、前記第2制御対象の伝達関数が前記第2ノミナルモデルの伝達関数に拘束されるように構成されている、請求項1に記載の制御装置。
【請求項4】
前記転舵側モータは、
第1転舵側モータと、
第2転舵側モータと、
を含み、
前記転舵側制御部は、
前記第1転舵側モータを含む第1制御対象を制御する第1転舵側制御部と、
前記第2転舵側モータを含む第2制御対象を制御する第2転舵側制御部と、
を含み、
前記第1転舵側モータが前記転舵機構を駆動することに起因する第1干渉トルクが前記第2制御対象に加えられ、
前記第2転舵側モータが前記転舵機構を駆動することに起因する第2干渉トルクが前記第1制御対象に加えられ、
前記第1転舵側制御部は、前記第1制御対象の伝達関数を前記第1制御対象の構成に基づく第1ノミナルモデルの伝達関数に拘束するモデルフォロイング制御によって、前記第2干渉トルクを補償し、
前記第2転舵側制御部は、前記第2制御対象の伝達関数を前記第2制御対象の構成に基づく第2ノミナルモデルの伝達関数に拘束するモデルフォロイング制御によって、前記第1干渉トルクを補償する、請求項1に記載の制御装置。
【請求項5】
前記第1ノミナルモデルの伝達関数は、前記第1入力トルクに対する前記第1転舵側モータの出力角度の比である機械的コンプライアンスの目標値に相当する伝達関数であり、
前記第2ノミナルモデルの伝達関数は、前記第2入力トルクに対する前記第2転舵側モータの出力角度の比である機械的コンプライアンスの目標値に相当する伝達関数である、請求項3に記載の制御装置。
【請求項6】
前記第1制御対象は、前記第1転舵輪を含み、
前記第2制御対象は、前記第2転舵輪を含む、請求項5に記載の制御装置。
【請求項7】
前記第1制御対象および前記第2制御対象のそれぞれは、前記転舵機構に設けられたブッシュを少なくとも1つ含む、請求項6に記載の制御装置。
【請求項8】
前記第1ノミナルモデルの伝達関数は、以下の式で表される関数F
na
(s)を少なくとも含む、請求項7に記載の制御装置。
TIFF
2025009739000024.tif
48
170
ただし、sはラプラス変換子であり、J
m1
は前記第1転舵側モータの慣性モーメントに相当するパラメータであり、B
m1
は前記第1転舵側モータの粘性摩擦係数に相当するパラメータであり、J
Tyre1
は前記第1転舵輪の慣性モーメントに相当するパラメータであり、B
Tyre1
は前記第1転舵輪の粘性摩擦係数に相当するパラメータであり、K
Bush1
は前記第1制御対象における前記ブッシュを含む弾性要素の等価ばね定数に相当するパラメータであり、G
1
は前記第1転舵側モータから前記第1転舵輪までのギヤ比に相当するパラメータである。
【請求項9】
前記第2ノミナルモデルの伝達関数は、以下の式で表される関数Fnb(s)を少なくとも含む、請求項7に記載の制御装置。
TIFF
2025009739000025.tif
45
170
ただし、sはラプラス変換子であり、J
m2
は前記第2転舵側モータの慣性モーメントに相当するパラメータであり、B
m2
は前記第2転舵側モータの粘性摩擦係数に相当するパラメータであり、J
Tyre2
は前記第2転舵輪の慣性モーメントに相当するパラメータであり、B
Tyre2
は前記第2転舵輪の粘性摩擦係数に相当するパラメータであり、K
Bush2
は前記第2制御対象における前記ブッシュを含む弾性要素の等価ばね定数に相当するパラメータであり、G
2
は前記第2転舵側モータから前記第2転舵輪までのギヤ比に相当するパラメータである。
【請求項10】
前記操舵者に前記ハンドルを介して伝達される操舵反力を制御する操舵反力制御部を備え、
前記第1モデルフォロイング制御部は、前記第1制御対象の出力に基づいて前記第1ノミナルモデルを用いて算出されたトルクと前記第1入力トルクとの差分に基づいて前記第2干渉トルクを含む第1推定値を算出し、
前記第2モデルフォロイング制御部は、前記第2制御対象の出力に基づいて前記第2ノミナルモデルを用いて算出されたトルクと前記第2入力トルクとの差分に基づいて前記第1干渉トルクを含む第2推定値を算出し、
前記操舵反力制御部は、前記第1推定値と前記第2推定値とを足し合わせた合計値に基づいて、前記操舵者に伝達される反力を制御する、請求項6に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、およびステアリング装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、機械的に連結されない分離型パワーステアリング装置、いわゆるステアバイワイヤ方式のステアリング装置が知られている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特許第4639500号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のようなステアリング装置においては、操舵性能のさらなる向上が望まれていた。
【0005】
本発明は、上記事情に鑑みて、ステアリング装置における操舵性能を向上できる制御装置、およびそのような制御装置を備えるステアリング装置を提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
本発明の制御装置の一つの態様は、操舵者が操舵するハンドルを有する操舵機構と、第1転舵輪および第2転舵輪を有する転舵機構と、前記転舵機構を駆動する転舵側モータと、を備え、車両に搭載されるステアバイワイヤ方式のステアリング装置に搭載される制御装置であって、前記転舵側モータを含む制御対象を制御する転舵側制御部を備える。前記転舵側制御部は、前記制御対象に入力される入力トルクを補正する補正トルクを、前記制御対象の出力と前記制御対象の構成に基づくノミナルモデルとに基づいて生成するモデルフォロイング制御部を有する。前記モデルフォロイング制御部は、前記制御対象と前記ノミナルモデルとのモデル化誤差に対する相補感度関数のゲイン特性におけるゲインが略1である周波数帯域において、前記制御対象の伝達関数が前記ノミナルモデルの伝達関数に拘束されるように構成されている。
【発明の効果】
【0007】
本発明の一つの態様によれば、ステアリング装置における操舵性能を向上できる。
【図面の簡単な説明】
【0008】
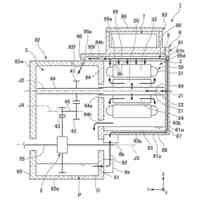
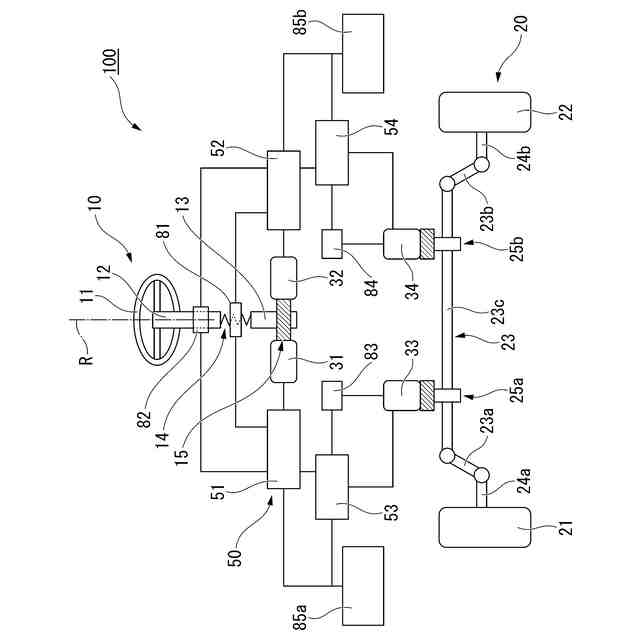
図1は、第1実施形態におけるステアリング装置を模式的に示す図である。
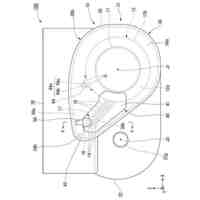
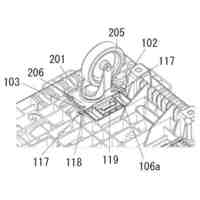
図2は、第1実施形態における転舵機構の一部を模式的に示す図である。
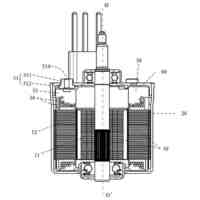
図3は、第1実施形態における第1転舵側モータの一部を模式的に示す図である。
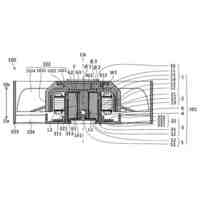
図4Aは、第1実施形態における第1転舵側モータの一部および第1転舵側制御部の一部を模式的に示す図である。
図4Bは、第1実施形態における第2転舵側モータの一部および第2転舵側制御部の一部を模式的に示す図である。
図5は、第1実施形態における制御装置の構成を示すブロック図である。
図6は、第1実施形態における指令値生成部の構成を示すブロック図である。
図7は、第1実施形態における指令値生成部の一部の構成を示すブロック図である。
図8は、車両応答特性と操舵者が車両を操舵する際のフィーリングとの関係を示すグラフである。
図9は、第1実施形態における協調制御部の構成を示すブロック図である。
図10は、第1実施形態における周波数領域設定部のゲイン特性を示すグラフである。
図11は、第1実施形態における操舵反力制御部の構成を示すブロック図である。
図12Aは、操舵トルクとセルフアライニングトルクとの関係の一例を示すグラフである。
図12Bは、アシストトルクと操舵トルクとの関係の一例を示すグラフである。
図13は、第1実施形態における第1転舵側制御部の一部の構成を示すブロック図である。
図14は、第1実施形態における第1制御対象を単純化したモデルを示す図である。
図15は、相補感度関数のゲイン特性、および第1制御対象の伝達関数と第1ノミナルモデルの伝達関数とのモデル化誤差の逆数のゲイン特性を例示するグラフである。
図16は、第1実施形態における第2転舵側制御部の一部の構成を示すブロック図である。
図17は、第2実施形態におけるステアリング装置を模式的に示す図である。
【発明を実施するための形態】
【0009】
<第1実施形態>
図1に示す本実施形態のステアリング装置100は、車両に搭載される。ステアリング装置100は、ステアバイワイヤ方式のステアリング装置である。図1に示すように、ステアリング装置100は、操舵者が操舵するハンドル11を含む操舵機構10と、第1転舵輪21および第2転舵輪22を有する転舵機構20と、第1操舵側モータ31と、第2操舵側モータ32と、第1転舵側モータ33と、第2転舵側モータ34と、制御装置50と、操舵トルクセンサ81と、舵角センサ82と、第1回転センサ83と、第2回転センサ84と、第1バッテリ85aと、第2バッテリ85bと、を備える。制御装置50は、第1操舵側制御部51と、第2操舵側制御部52と、第1転舵側制御部53と、第2転舵側制御部54と、を備える。第1バッテリ85aは、第1操舵側制御部51および第1転舵側制御部53に電力を供給する。第2バッテリ85bは、第2操舵側制御部52および第2転舵側制御部54に電力を供給する。
【0010】
車両を運転する運転者、すなわち操舵者がハンドル11を介して操舵機構10を操舵すると、制御装置50によって第1転舵側モータ33および第2転舵側モータ34が駆動され、第1転舵側モータ33および第2転舵側モータ34によって転舵機構20が駆動される。転舵機構20が駆動されることによって、第1転舵輪21の角度および第2転舵輪22の角度が変えられ、車両の進行方向が変化する。第1転舵輪21および第2転舵輪22は、車両におけるフロント側の一対のタイヤである。第1転舵輪21の角度および第2転舵輪22の角度は、転舵角である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ニデック株式会社
駆動装置
今日
ニデック株式会社
モータ及び電気製品
6日前
ニデック株式会社
モータ、ファンモータ
今日
ニデック株式会社
回転電機、および駆動装置
今日
ニデック株式会社
回転電機、および駆動装置
今日
ニデック株式会社
ステータ、モータ及びドローン
今日
ニデック株式会社
ロータ、および回転電機、および駆動装置
今日
個人
折り畳み自転車
4か月前
個人
発音装置
1か月前
個人
重量物移動台車
11か月前
個人
電動モビリティ
1か月前
個人
自転車用傘捕捉具
5か月前
個人
体重掛けリフト台車
4か月前
個人
自由方向乗車自転車
1か月前
個人
自転車用荷台
8か月前
井関農機株式会社
作業車両
10か月前
個人
アタッチメント
5か月前
個人
自転車用荷物台
4か月前
個人
キャンピングトライク
2か月前
個人
ステアリングの操向部材
2か月前
株式会社ホシプラ
台車
12か月前
株式会社CPM
駐輪機
5か月前
個人
ステアリングの操向部材
7か月前
個人
スライドレインプルーフ
10か月前
株式会社クラベ
面状ユニット
10か月前
三甲株式会社
台車
7か月前
株式会社三五
リアサブフレーム
4か月前
祖峰企画株式会社
平台車
9か月前
三甲株式会社
台車
7か月前
帝人株式会社
車両構造体
10か月前
豊田合成株式会社
ハンドル
11か月前
ヤマハ発動機株式会社
車両
5か月前
個人
足踏みペダル式自転車
10か月前
ヤマハ発動機株式会社
車両
5か月前
ヤマハ発動機株式会社
車両
5か月前
豊田合成株式会社
操舵装置
5か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ