TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025007190
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023108421
出願日
2023-06-30
発明の名称
ショベル、及びショベルの遠隔操作システム
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
E02F
9/20 20060101AFI20250109BHJP(水工;基礎;土砂の移送)
要約
【課題】安全性の向上を実現する。
【解決手段】実施形態の一態様に係るショベルは、上部旋回体と、前記上部旋回体を旋回可能に支持する下部走行体と、傾斜センサと、前記傾斜センサの検出結果によって前記下部走行体の接地面が第1の角度より傾斜していると判定された場合、当該接地面が当該第1の角度より傾斜していないと判定された場合と比べて、前記下部走行体が走行する速度を低くする制御を行うように構成されている制御部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
上部旋回体と、
前記上部旋回体を旋回可能に支持する下部走行体と、
傾斜センサと、
前記傾斜センサの検出結果によって前記下部走行体の接地面が第1の角度より傾斜していると判定された場合、当該接地面が当該第1の角度より傾斜していないと判定された場合と比べて、前記下部走行体が走行する速度を低くする制御を行うように構成されている制御部と、
を備えるショベル。
続きを表示(約 1,800 文字)
【請求項2】
前記制御部は、操作装置からの受け付けた操作量に応じて前記下部走行体が走行する速度を制御し、
前記操作装置から第1の操作量を受け付けた際、前記第1の角度より傾斜していると判定された場合、前記第1の角度より傾斜していないと判定された場合と比べて、前記下部走行体が走行する速度を低くする制御を行うように構成されている、
請求項1に記載のショベル。
【請求項3】
前記操作装置は、電気式操作レバーであり、
前記制御部は、前記電気式操作レバーが受け付けた操作量を示した信号に応じて、前記下部走行体が走行する速度の制御を行うように構成されている、
請求項2に記載のショベル。
【請求項4】
前記下部走行体に設けられる左のクローラの駆動させる左走行モータと、
前記下部走行体に設けられる右のクローラの駆動させる右走行モータと、を備え、
前記操作装置は、前記左走行モータに対応した左操作レバーと、前記右走行モータに対応した右操作レバーと、を含み、
前記制御部は、前記左操作レバーから第1の操作量を受け付けた際、前記第1の角度より傾斜していると判定された場合、前記第1の角度より傾斜していないと判定された場合と比べて、前記左走行モータの回転数を低くする制御を行い、前記右操作レバーから第1の操作量を受け付けた際、前記第1の角度より傾斜していると判定された場合、前記第1の角度より傾斜していないと判定された場合と比べて、前記右走行モータの回転数を低くする制御を行うように構成されている、
請求項2又は3に記載のショベル。
【請求項5】
前記制御部は、
前記第1の角度より傾斜していると判定された場合、前記第1の角度より傾斜していないと判定された場合と比べて、
前記左操作レバー又は前記右操作レバーが受け付けた操作量に対する、前記左走行モータ又は前記右走行モータを駆動させるための指令値の比率を低くする制御を行うように構成されている、又は、前記指令値を、所定値以下に抑制するように構成されている、
請求項4に記載のショベル。
【請求項6】
前記制御部は、前記傾斜センサの検出結果によって前記下部走行体の前記接地面が前記第1の角度より傾斜していると判定された場合、前記接地面が前記第1の角度より傾斜していないと判定された場合と比べて、前記下部走行体を駆動させる駆動源の回転数を低くする制御を行うように構成されている、
請求項1又は2に記載のショベル。
【請求項7】
前記制御部は、所定の操作を受け付けた後、前記第1の角度より傾斜していると判定された場合に、前記接地面が前記第1の角度より傾斜していないと判定された場合と比べて、前記下部走行体が走行する速度を低くする制御を停止するように構成されている、
請求項1又は2に記載のショベル。
【請求項8】
前記制御部は、前記傾斜センサの検出結果によって前記下部走行体の前記接地面が前記第1の角度より傾斜していると判定された後、前記第1の角度よりも小さい第2の角度より傾斜していないと判定された場合に、前記下部走行体が走行する速度を低くする制御を停止するように構成されている、
請求項1又は2に記載のショベル。
【請求項9】
前記制御部は、
前記ショベルを自律走行させる経路を示された経路情報を取得した場合に、
前記経路情報で示された前記経路のうち、前記下部走行体の前記接地面が前記第1の角度より傾斜している経路に対して、前記接地面が当該第1の角度より傾斜していない経路と比べて、前記下部走行体の速度を低くする設定を行うように構成されている、
請求項1に記載のショベル。
【請求項10】
上部旋回体と、前記上部旋回体を旋回可能に支持する下部走行体と、傾斜センサと、を備えるショベルと、
前記ショベルを遠隔から操作するための遠隔操作装置と、を備え、
前記遠隔操作装置から第1の操作量を受け付けた際、第1の角度より傾斜していると判定された場合、当該第1の角度より傾斜していないと判定された場合と比べて、前記下部走行体が走行する速度を低くする制御を行うように構成されている、
ショベルの遠隔操作システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ショベル、及びショベルの遠隔操作システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来からショベルは、様々な環境下で利用される。例えばショベルは、作業現場において移動する際に、傾斜地を移動することもある。傾斜地では、アタッチメント等の姿勢状態や動作状態によっては、ショベルは不安定な姿勢状態となる可能性がある。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/049490号
【発明の概要】
【発明が解決しようとする課題】
【0004】
このため、例えば、特許文献1に記載された技術では、傾斜地の場合に警告を出力することで、安全な操作を促すことを可能としている。しかしながら、特許文献1では、警告を出力するに留まっており、ショベルに対して、具体的にはどのような制御を行えばよいか認識されていない場合もある。
【0005】
上述に鑑み、ショベルが、傾斜地を走行する場合に、走行する速度を低くする制御を行うことで、安全性の向上を実現する。
【課題を解決するための手段】
【0006】
本発明の一態様に係るショベルは、上部旋回体と、前記上部旋回体を旋回可能に支持する下部走行体と、傾斜センサと、前記傾斜センサの検出結果によって前記下部走行体の接地面が第1の角度より傾斜していると判定された場合、当該接地面が当該第1の角度より傾斜していないと判定された場合と比べて、前記下部走行体が走行する速度を低くする制御を行うように構成されている制御部と、を備える。
【発明の効果】
【0007】
本発明の一態様によれば、走行する速度を低くする制御を行うことで、安全性の向上を実現する。
【図面の簡単な説明】
【0008】
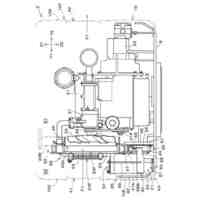
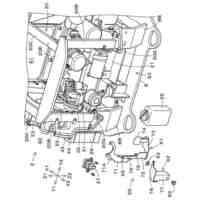
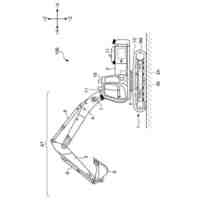
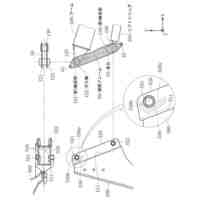
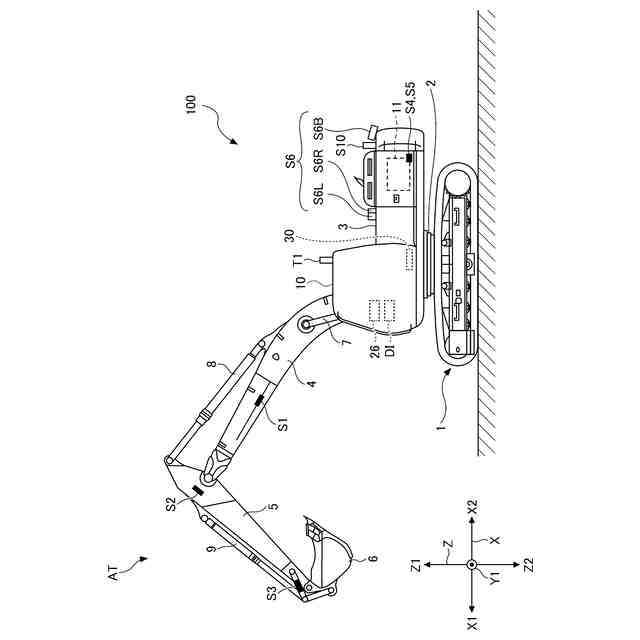
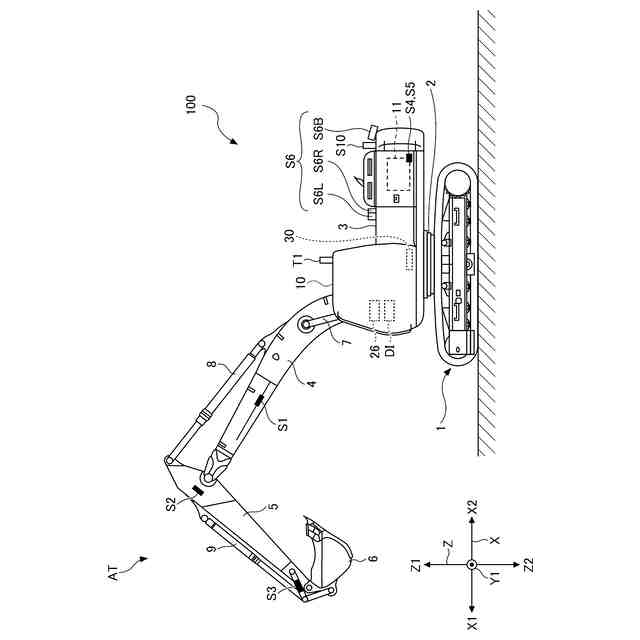
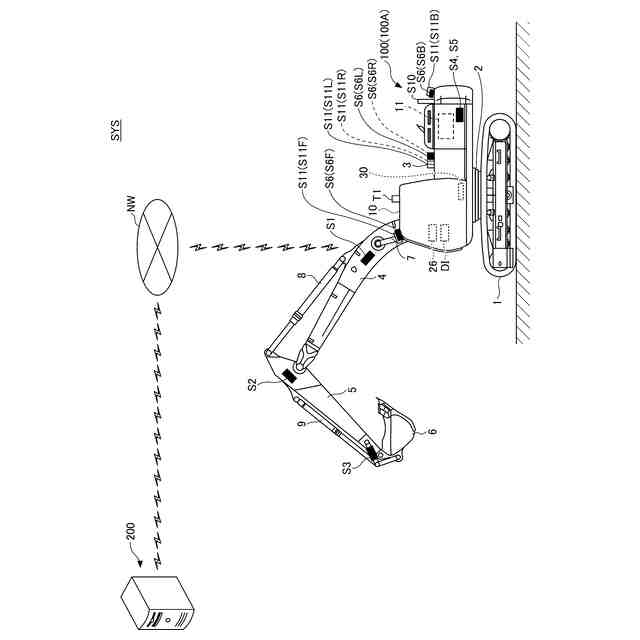
図1は、第1の実施形態に係るショベルの側面図である。
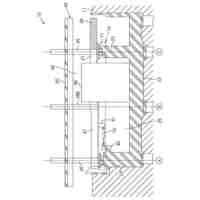
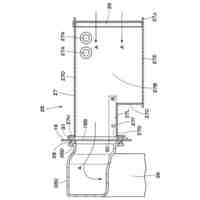
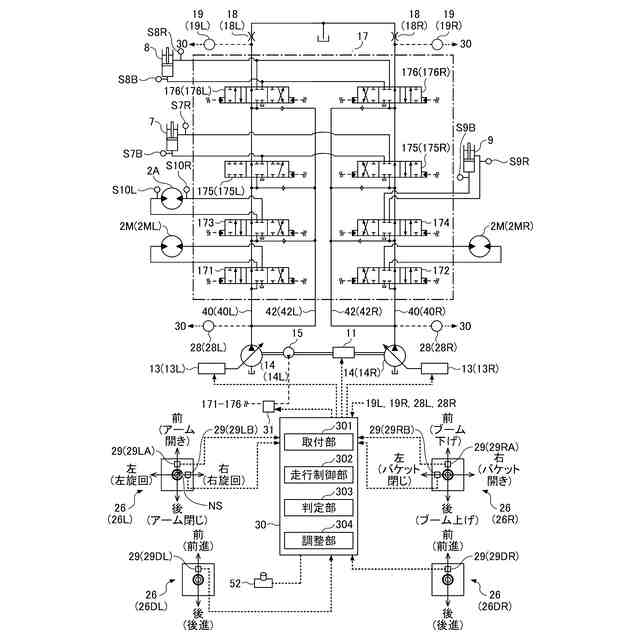
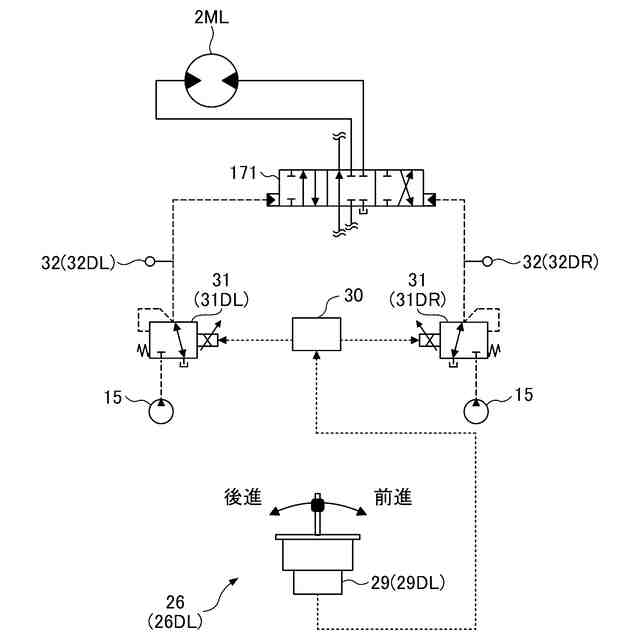
図2は、第1の実施形態に係るショベルに搭載される油圧システムの構成例を示す図である。
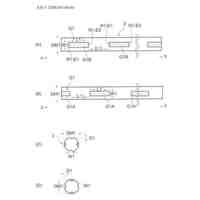
図3は、第1の実施形態に係る左走行油圧モータの操作に関する油圧システム部分を抜き出した図である。
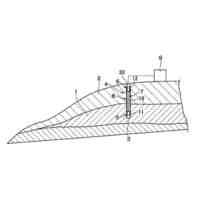
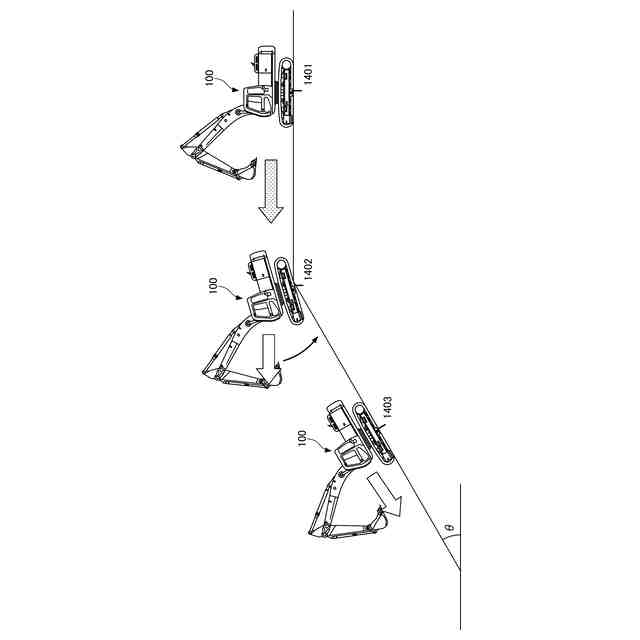
図4は、第1の実施形態に係るショベルの接地面の走行状態を例示した図である。
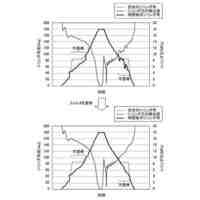
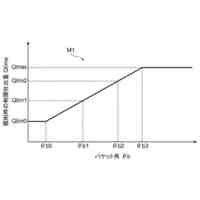
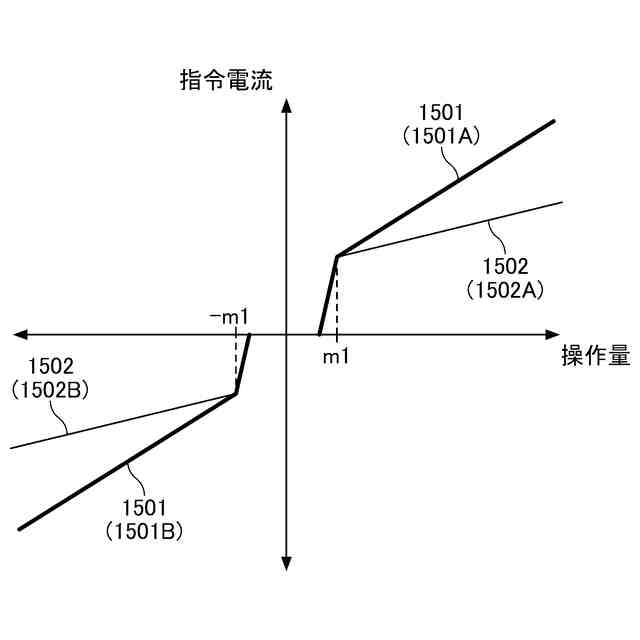
図5は、第1の実施形態に係る操作装置に対する操作量と指令電流との関係の一例を示すグラフである。
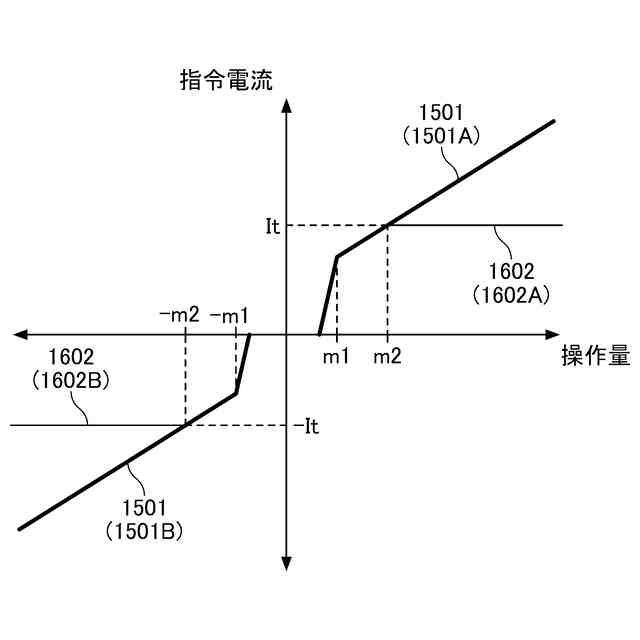
図6は、変形例に係る操作装置に対する操作量と指令電流との関係の一例を示すグラフである。
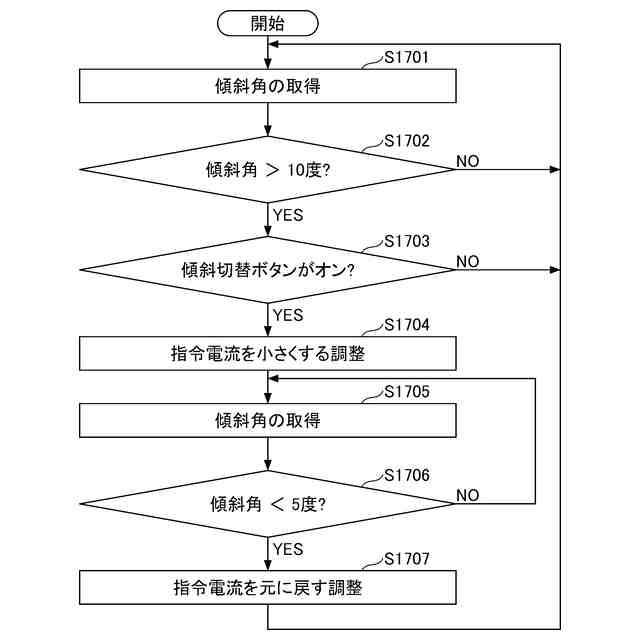
図7は、第1の実施形態に係るショベルコントローラによる走行する速度の調整手順を示したフローチャートである。
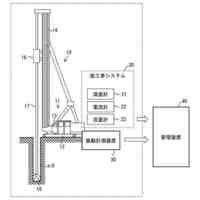
図8は、第2の実施形態に係るショベルの自律制御システムの一例を示す概要図である。
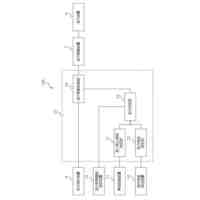
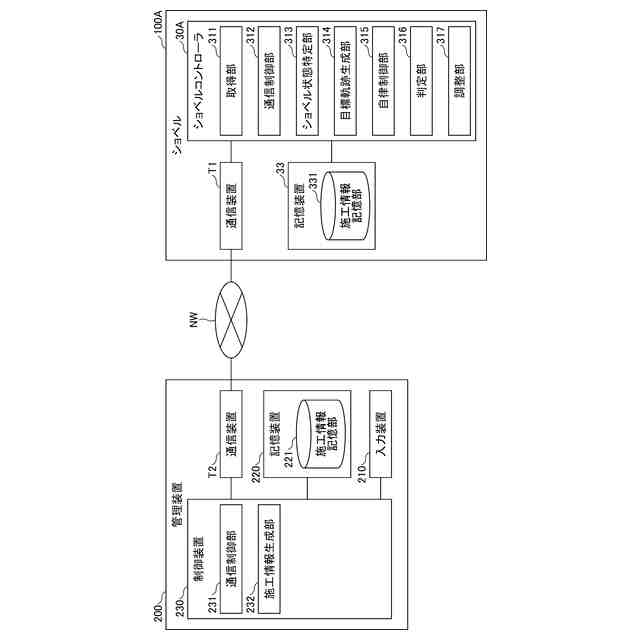
図9は、第2の実施形態に係る自律制御システムの構成例を示す機能ブロック図である。
図10は、第2の実施形態に係る自律制御システムにおける、ショベルの自律制御による移動手順を示したシーケンス図である。
図11は、第3の実施形態に係る遠隔操作システムの一例を示す概要図である。
図12は、第3の実施形態に係る遠隔操作システムの構成例を示す機能ブロック図である。
図13は、第3の実施形態に係るショベル及び遠隔操作室による遠隔操作を示したシーケンス図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について図面を参照して説明する。また、以下で説明する実施形態は、発明を限定するものではなく例示であって、実施形態に記述される全ての特徴やその組み合わせは、必ずしも発明の本質的なものであるとは限らない。なお、各図面において同一の又は対応する構成には同一の又は対応する符号を付し、説明を省略することがある。
【0010】
(第1の実施形態)
まず、図1を参照して、本実施形態に係るショベル100の概要について説明する。図1は、第1の実施形態に係る作業機械としてのショベル100の側面図である。ショベル100の下部走行体1には旋回機構2を介して上部旋回体3が旋回可能に搭載される。上部旋回体3にはブーム4が取り付けられる。ブーム4の先端にはアーム5が取り付けられ、アーム5の先端にはエンドアタッチメントとしてのバケット6が取り付けられる。エンドアタッチメントは、法面用バケット又は浚渫用バケット等であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大林組
建築物
5日前
住友建機株式会社
ショベル
1か月前
株式会社ジェック
水流方向切替装置
7日前
日本車輌製造株式会社
杭打機
2日前
株式会社テクアノーツ
通船ゲート装置
2日前
ヤンマーホールディングス株式会社
作業機械
5日前
株式会社クボタ
作業機
5日前
株式会社クボタ
作業機
5日前
株式会社クボタ
作業機
5日前
株式会社クボタ
作業機
5日前
コベルコ建機株式会社
作業機械
2日前
日立建機株式会社
作業機械
今日
住友重機械工業株式会社
作業機械
1か月前
住友重機械工業株式会社
作業機械
14日前
住友重機械工業株式会社
ショベル
5日前
住友重機械工業株式会社
ショベル
5日前
個人
鋼管杭とその製造方法
1か月前
株式会社地盤リスク研究所
擁壁の補強工法
2日前
鹿島建設株式会社
建込み方法
27日前
大和ハウス工業株式会社
建物の建設方法
5日前
日鉄建材株式会社
透過型砂防堰堤の設計方法
7日前
ジーネットワーク株式会社
低空頭FRP.Tube合成杭
1か月前
個人
アンカーボルト支持装置
1か月前
大和ハウス工業株式会社
浸水推定装置
2日前
コベルコ建機株式会社
作業システム
2日前
日本製鉄株式会社
堤防
5日前
スーパーレジンクラフト株式会社
防塵板付消波装置
1か月前
日立建機株式会社
作業車両
29日前
清水建設株式会社
礫材の液状化対策構造
2日前
三陽機器株式会社
作業機の作業部連結構造
29日前
一般財団法人電力中央研究所
地盤の状況計測装置
5日前
株式会社大林組
判定支援システム及び判定支援方法
5日前
株式会社地盤リスク研究所
盛土安定化工法、及び盛土構造
2日前
株式会社日立建機ティエラ
建設機械
7日前
株式会社竹中工務店
山留め工法
1か月前
コベルコ建機株式会社
建設機械
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ