TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025006948
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023108006
出願日
2023-06-30
発明の名称
把持機構及び搬送装置
出願人
株式会社日本マイクロニクス
代理人
個人
,
個人
主分類
B25J
15/08 20060101AFI20250109BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】隣接する他の対象物との干渉を防止しながら、対象物を強力に把持できるようにする。
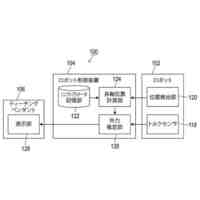
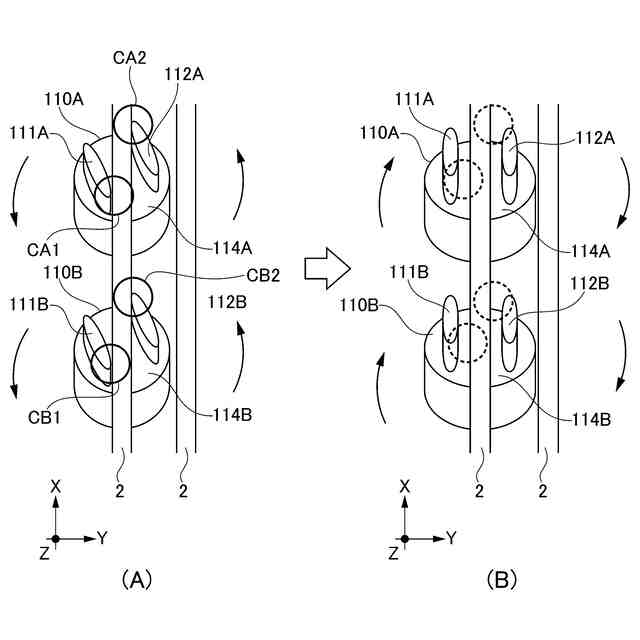
【解決手段】本発明の把持機構は、対象物を挟んで把持する把持機構において、対象物に接触可能な、少なくとも2個以上の回転固定部と、それぞれの回転固定部の回転動作を制御する回転制御部と、を備え、少なくとも2個以上の回転固定部を回転させることにより、回転した回転固定部を前記対象物に接触させて、前記対象物を把持することを特徴とする。また、本発明の搬送装置は、第1の本発明の把持機構を有し、把持機構により把持された対象物を移動させることを特徴とする。
【選択図】 図1
特許請求の範囲
【請求項1】
対象物を挟んで把持する把持機構において、
前記対象物に接触可能な、少なくとも2個以上の回転固定部と、
それぞれの前記回転固定部の回転動作を制御する回転制御部と、
を備え、
少なくとも2個以上の前記回転固定部を回転させることにより、回転した前記回転固定部を前記対象物に接触させて、前記対象物を把持する
ことを特徴とする把持機構。
続きを表示(約 990 文字)
【請求項2】
前記把持機構においては、互いに離間させて一対の前記回転固定部を設けた、少なくとも2つの把持部を有し、
少なくとも2つの前記把持部が、一対の前記回転固定部の間に前記対象物を挟み込み、一対の前記回転固定部を回転させることで、前記対象物を支持して前記対象物を把持する
ことを特徴とする請求項1に記載の把持機構。
【請求項3】
1つの前記回転固定部を設けた、少なくとも2つの把持部を有し、
少なくとも2つの前記回転固定部を回転させることで、前記把持部が前記対象物を両側から挟み込み、前記対象物を支持して前記対象物を把持する
ことを特徴とする請求項1に記載の把持機構。
【請求項4】
前記把持機構においては、本体部と、前記本体部の一方の端面に前記回転固定部とを有する複数の把持部を備え、
前記回転固定部の寸法は、前記本体部の端面の寸法よりも小さいことを特徴とする請求項1に記載の把持機構。
【請求項5】
複数の前記回転固定部は、すべて同一の回転方向に回転することで、前期対象物を把持する
ことを特徴とする請求項1に記載の把持機構。
【請求項6】
前記回転制御部は、前記対象物の把持時に、それぞれの前記回転固定部を所定角度だけ回転させる
ことを特徴とする請求項1に記載の把持機構。
【請求項7】
それぞれの前記回転固定部の回転動作により前記対象物に作用する圧力を検知する検知部を備え、
前記回転制御部は、前記検知部からの検知信号に基づいて、それぞれの前記回転固定部を回転制御する
ことを特徴とする請求項1に記載の把持機構。
【請求項8】
複数の回転固定部が前記対象物と接触して前記対象物を支持する際に、前記複数の回転固定部と前記対象物との接触点が、対向する位置に存在していることを特徴とする請求項1に記載の把持機構。
【請求項9】
前記回転固定部が、断面楕円形状の部材であることを特徴とする請求項1に記載の把持機構。
【請求項10】
前記対象部を支持する前記回転固定部の先端が、斜面を有していることを特徴とする請求項1に記載の把持機構。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、把持機構及び搬送装置に関し、例えば、2個以上の把持部で対象物を把持する把持機構と、前記把持機構により把持されている対象物を搬送する搬送装置とに適用し得るものである。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
例えば、プローブカードのプローブ基板は多数のプローブ(電気的接触子)を有しており、プローブ基板へのプローブの装着又は取り外しには、把持機構を備えた搬送装置が用いられている。
【0003】
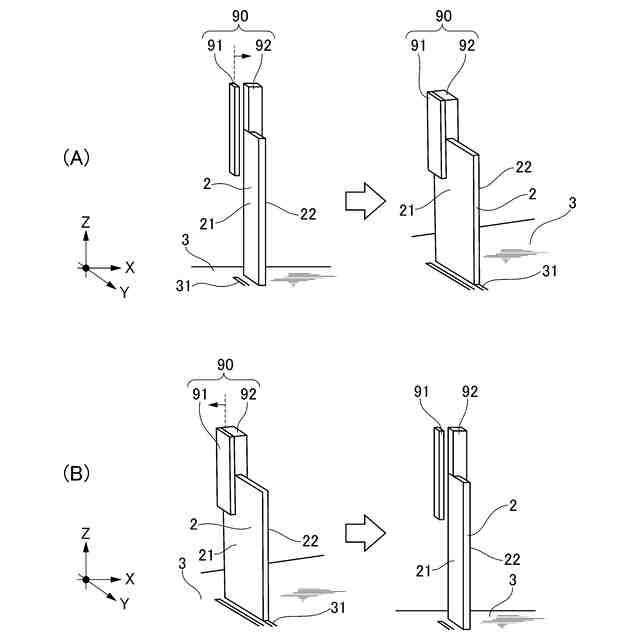
図3(A)は把持機構による把持を説明する説明図であり、図3(B)は把持機構による把持の開放を説明する説明図である。
【0004】
この例では、把持機構90が2本の把持片91及び92を有するものであり、2本の把持片91及び92で対象物2としてのプローブを把持する場合を説明する。
【0005】
図3(A)に例示するように、対象物2としてのプローブの装着時に、2本の把持片91及び92は互いに距離をおいた状態で移動し、2本の把持片91及び92の間にプローブが存在するように移動させる。そして、一方の把持片91が他方の把持片92に近づくように、一方の把持片91の位置を移動させて、2本の把持片91及び92がプローブを挟み込むようにする。これにより把持機構90がプローブを把持することができる。
【0006】
その後、把持機構90により把持された状態で、プローブ基板3上の取付孔31の位置までプローブを移動させる。そして、プローブ基板3上の取付孔31にプローブを差し込んで装着する。
【0007】
そして、装着し終えると、図3(B)に例示するように、一方の把持片91が他方の把持片92から離れるように、一方の把持片91の位置を移動させることで把持を開放する。
【先行技術文献】
【特許文献】
【0008】
特開2004-050321号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、プローブ基板3には多数のプローブが配置される。そのため、隣接するプローブとの間隔が狭く、一方の把持片92を移動させるときに、その一方の把持片91が隣接するプローブに干渉してしまうことがある(図4参照)。
【0010】
なお、対象物が板状のプローブである場合を例示するが、対象物はプローブに限らず、他の板状部材を把持する場合においても同様の課題が生じ得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社エビス
連結具
1か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
今日
株式会社マキタ
電動工具
2か月前
日本車輌製造株式会社
締め付け工具
今日
川崎重工業株式会社
ロボットアーム
今日
株式会社マキタ
ハンマドリル
2か月前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
ロボットアーム
今日
川崎重工業株式会社
ロボットリスト
今日
CKD株式会社
吸着型搬送装置
14日前
川崎重工業株式会社
ロボットシステム
今日
株式会社安川電機
ロボット
17日前
株式会社安川電機
ロボット
17日前
川崎重工業株式会社
塗装ロボット
21日前
株式会社アイエイアイ
グリッパー
2か月前
長堀工業株式会社
締結装置
1か月前
株式会社安川電機
ロボット
17日前
ジヤトコ株式会社
圧入装置
13日前
株式会社不二越
ロボットの操作装置
1か月前
株式会社山下工業研究所
ラチェットレンチ
1か月前
株式会社アマダ
磁気吸着装置
20日前
モトコマ株式会社
寄せポンチホルダー
1日前
トヨタ自動車株式会社
制御装置及び制御方法
今日
株式会社不二越
協働ロボットシステム
2か月前
工機ホールディングス株式会社
作業機
20日前
工機ホールディングス株式会社
作業機
20日前
工機ホールディングス株式会社
作業機
1か月前
株式会社マキタ
電動工具用集塵システム
1か月前
個人
ターンバックル用工具
7日前
有限会社松尾エンジニアリング
連結部材
1日前
株式会社マキタ
電動工具用集塵システム
1か月前
工機ホールディングス株式会社
電気機器
1か月前
株式会社ミマキエンジニアリング
印刷システム
29日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ