TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025004332
公報種別
公開特許公報(A)
公開日
2025-01-15
出願番号
2023103950
出願日
2023-06-26
発明の名称
電子機器、腕振り解析方法及びプログラム
出願人
カシオ計算機株式会社
代理人
弁理士法人光陽国際特許事務所
主分類
A61B
5/11 20060101AFI20250107BHJP(医学または獣医学;衛生学)
要約
【課題】より簡便にユーザの腕振り
時における肘の曲げ角度を特定
することのできる電子機器
、
腕振り
解析
方法
及びプログラム
を提供する。
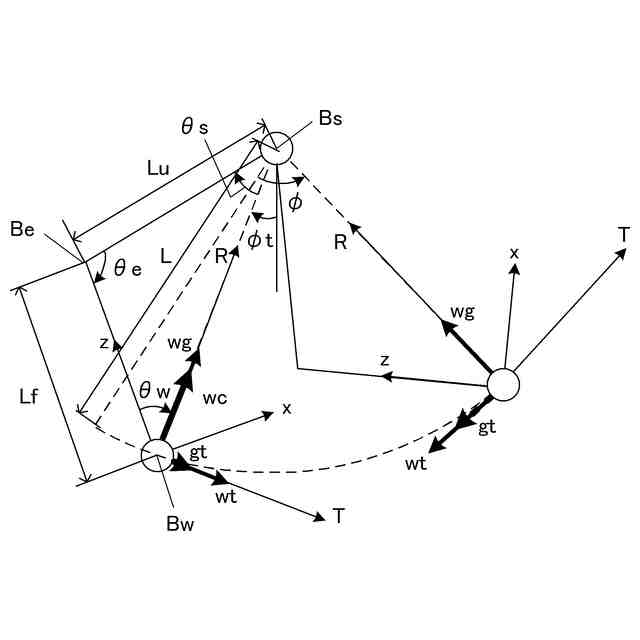
【解決手段】電子機器は、3次元加速度を計測する計測部により計測された3次元加速度からユーザの腕振りに係る周期的な変化を特定する処理部を備える。処理部は、ユーザの手首において計測された3次元加速度からユーザの腕振りの面を含む2次元面を規定し、周期的な変化を2次元面内でユーザの肩を中心とした円弧上での運動として検出し、3次元加速度から、手首と肩とを結ぶ線分の方向を求めて肘の曲がり角度を算出する。
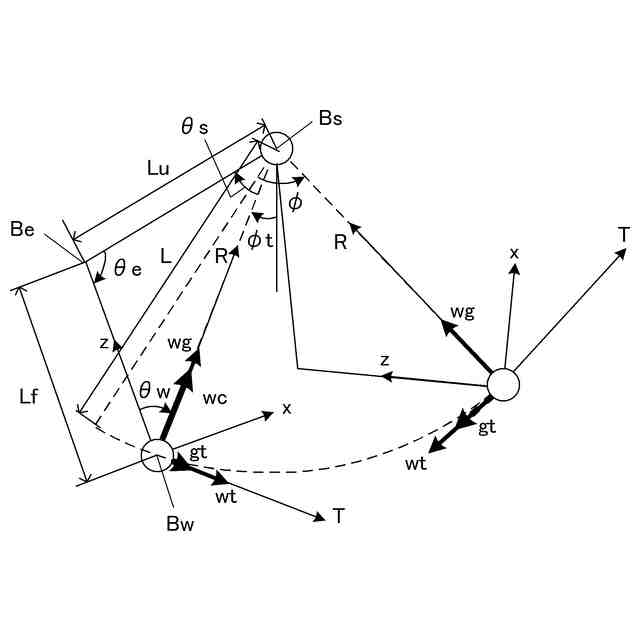
【選択図】図5
特許請求の範囲
【請求項1】
3次元加速度を計測する計測部により計測された前記3次元加速度からユーザの腕振りに係る周期的な変化を特定する処理部を備え、
前記処理部は、ユーザの手首において計測された前記3次元加速度から前記ユーザの腕振りの面を含む2次元面を規定し、前記周期的な変化を前記2次元面内で前記ユーザの肩を中心とした円弧上での運動として検出し、前記3次元加速度から、前記手首と前記肩とを結ぶ線分の方向を求めて肘の曲がり角度を算出する
電子機器。
続きを表示(約 990 文字)
【請求項2】
前記運動は、往復運動である、請求項1記載の電子機器。
【請求項3】
前記処理部は、腕振り動作時に計測された前記3次元加速度に基づいて、前記2次元面内における加速度を特定し、
前記2次元面内における加速度から直流成分を抽出することで、前記線分の方向を特定し、
前記線分と、前記ユーザの手首から肘へ向かう方向とがなす第1角度を算出し、
前記算出された第1角度に基づいて、前記肘の曲がり角度を算出する、
請求項2記載の電子機器。
【請求項4】
前記処理部は、前記ユーザの腕の長さと、前記第1角度とに基づいて、前記肘の曲がり角度を算出する、請求項3記載の電子機器。
【請求項5】
前記処理部は、前記腕振りの一周期以上の期間における各計測データについて、それぞれ前記肘の曲がり角度を算出し、算出された複数の前記肘の曲がり角度から、肘の曲がり角度の代表値を定める、請求項1記載の電子機器。
【請求項6】
前記3次元加速度を計測する計測部を備える請求項1~5のいずれか一項に記載の電子機器。
【請求項7】
3次元加速度を計測する計測部により計測された前記3次元加速度からユーザの腕振りに係る周期的な変化を特定する腕振り角度算出方法であって、
ユーザの手首において計測された前記3次元加速度から前記ユーザの腕振りの面を含む2次元面を規定し、前記周期的な変化を前記2次元面内で前記ユーザの肩を中心とした円弧上での運動として検出し、前記3次元加速度から、前記手首と前記肩とを結ぶ線分の方向を求めて肘の曲がり角度を算出する
腕振り解析方法。
【請求項8】
コンピュータを、
3次元加速度を計測する計測部により計測された前記3次元加速度からユーザの腕振りに係る周期的な変化を特定する特定手段として機能させ、
前記特定手段は、
ユーザの手首において計測された前記3次元加速度から前記ユーザの腕振りの面を含む2次元面を規定し、前記周期的な変化を前記2次元面内で前記ユーザの肩を中心とした円弧上での運動として検出し、前記3次元加速度から、前記手首と前記肩とを結ぶ線分の方向を求めて肘の曲がり角度を算出する
プログラム。
発明の詳細な説明
【技術分野】
【0001】
この発明は、電子機器及び腕振り解析方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
手首(腕)や腰などの人体に装着する電子機器により装着者の運動状態を計測、解析して、当該装着者の適切な運動の維持や改善を支援する技術がある。人体には、ウォーキングやランニングなど(以降まとめて走歩行と記す)の運動に応じて、腕の振りなどの種々の周期的な加速度や角速度の変化が生じる。これらの周期的な変化の計測結果により、ユーザの走歩行の量や分量に加えて、走歩行時の姿勢、その変化、ブレや偏りなどが評価され得る。
【0003】
このような評価値の一つとして、肘の曲げ角度(肘角度)がある(例えば、特許文献1)。この肘角度は、また、他の評価値を算出する際に必要になる場合がある。従来、肘角度は、複数のセンサを併用して求められている。
【先行技術文献】
【特許文献】
【0004】
特開2016-146987号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、腕振り時の肘の曲げ角度を求めるために複数の電子機器を装着したり、複数の計測機器を併用したりすると、コスト、重量や処理負荷が増大し、手間がかかるという課題がある。
【0006】
この発明の目的は、より簡便にユーザの腕振り時における肘の曲げ角度を特定することのできる電子機器及び腕振り解析方法を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明は、
3次元加速度を計測する計測部により計測された前記3次元加速度からユーザの腕振りに係る周期的な変化を特定する処理部を備え、
前記処理部は、ユーザの手首において計測された前記3次元加速度から前記ユーザの腕振りの面を含む2次元面を規定し、前記周期的な変化を前記2次元面内で前記ユーザの肩を中心とした円弧上での運動として検出し、前記3次元加速度から、前記手首と前記肩とを結ぶ線分の方向を求めて肘の曲がり角度を算出する
電子機器である。
【発明の効果】
【0008】
本発明に従うと、電子機器において、より簡便にユーザの腕振り時における肘の曲げ角度を特定することができるという効果がある。
【図面の簡単な説明】
【0009】
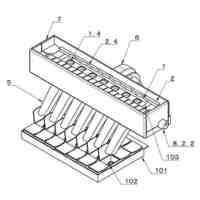
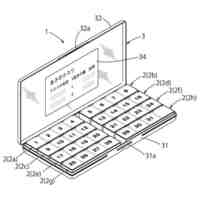
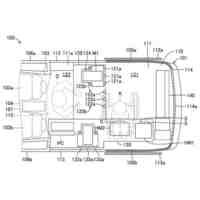
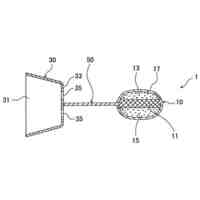
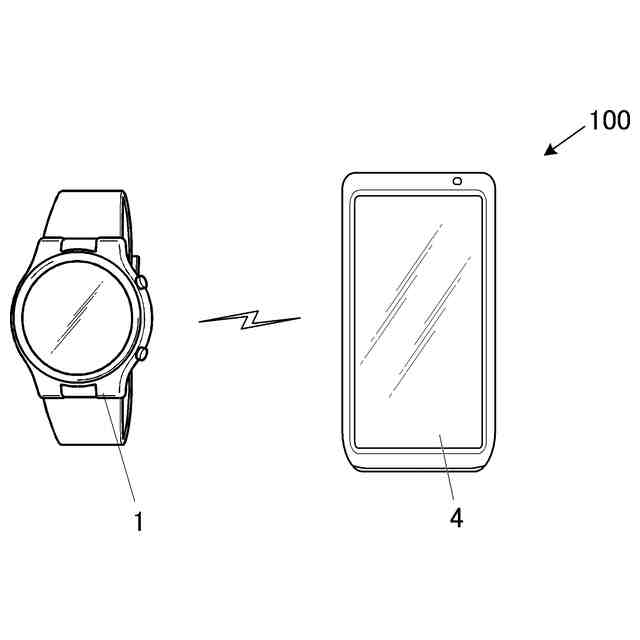
第1実施形態の計測システムの全体構成を示す図である。
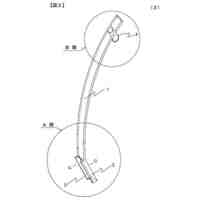
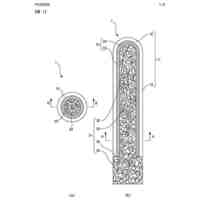
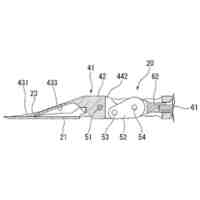
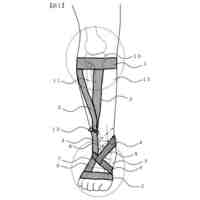
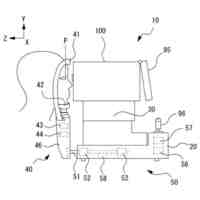
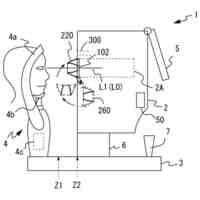
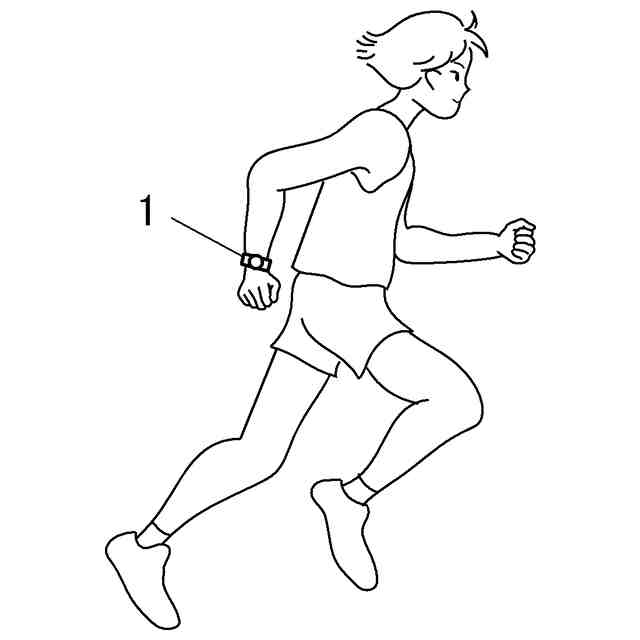
電子機器がユーザの腕に装着された状態を示す図である。
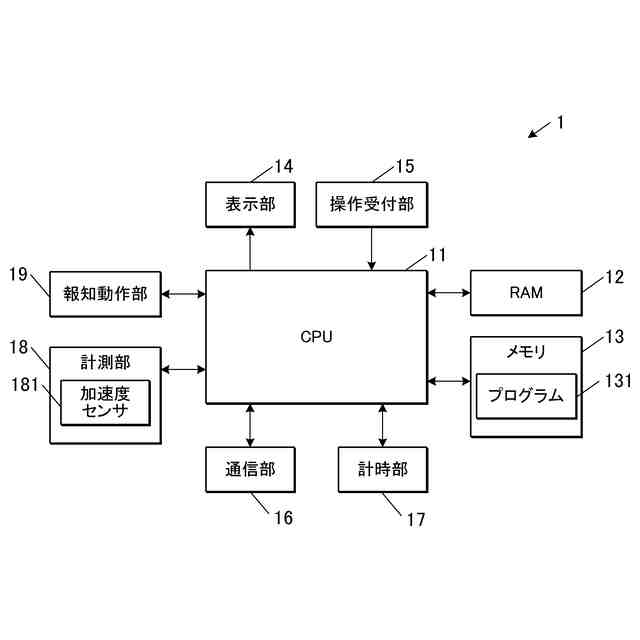
電子機器の機能構成を示すブロック図である。
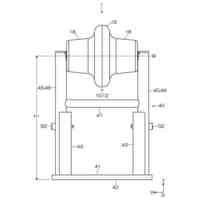
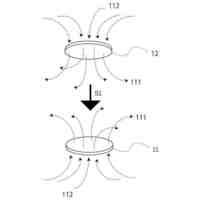
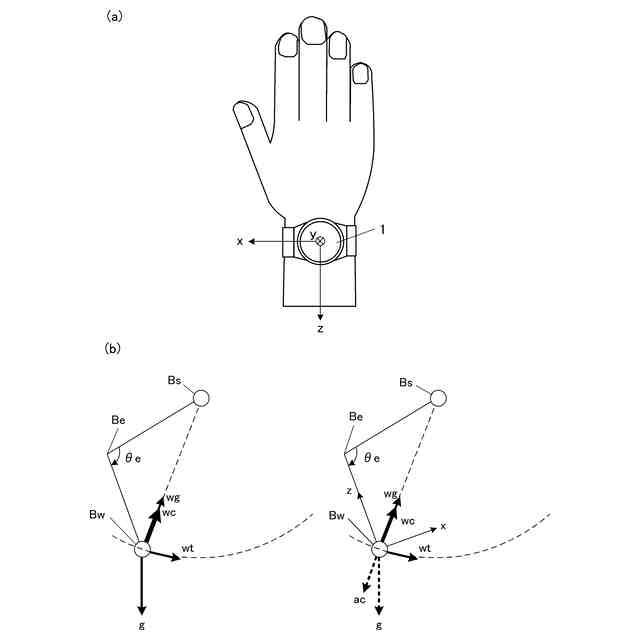
加速度センサの計測について説明する図である。
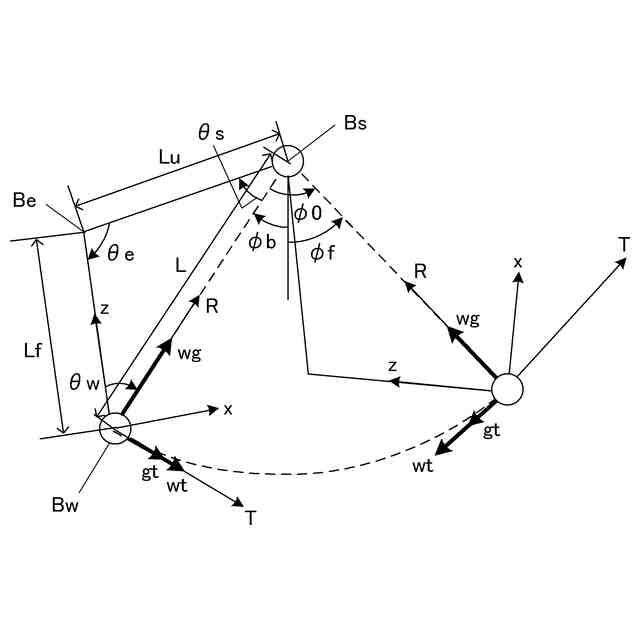
腕振りの計測及び角度の算出について説明する図である。
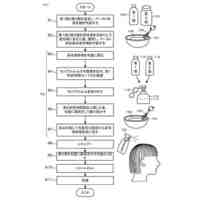
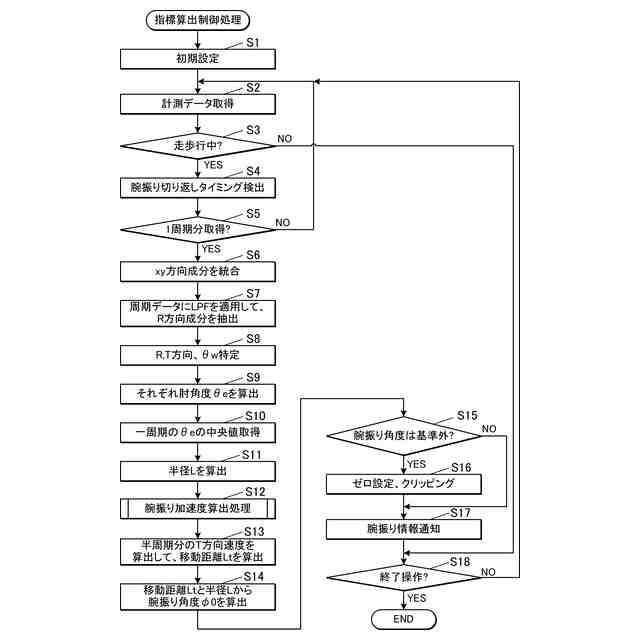
第1実施形態の指標算出制御処理の制御手順を示すフローチャートである。
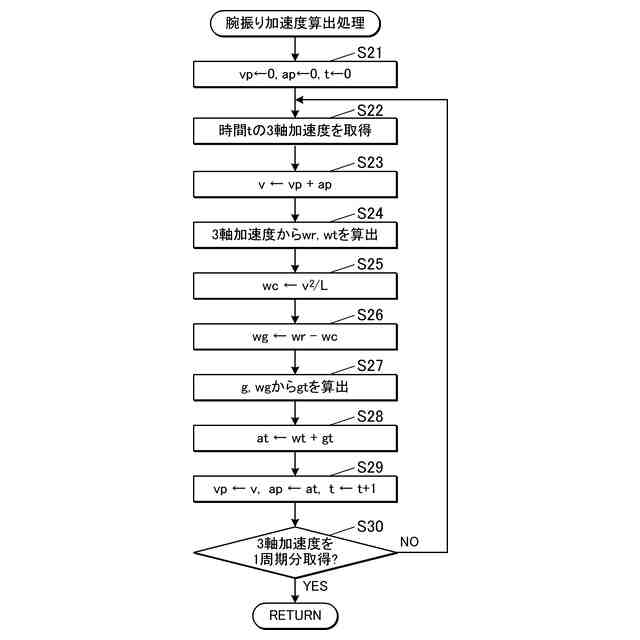
腕振り加速度算出処理の制御手順を示すフローチャートである。
変形例の振れ幅の求め方について説明する図である。
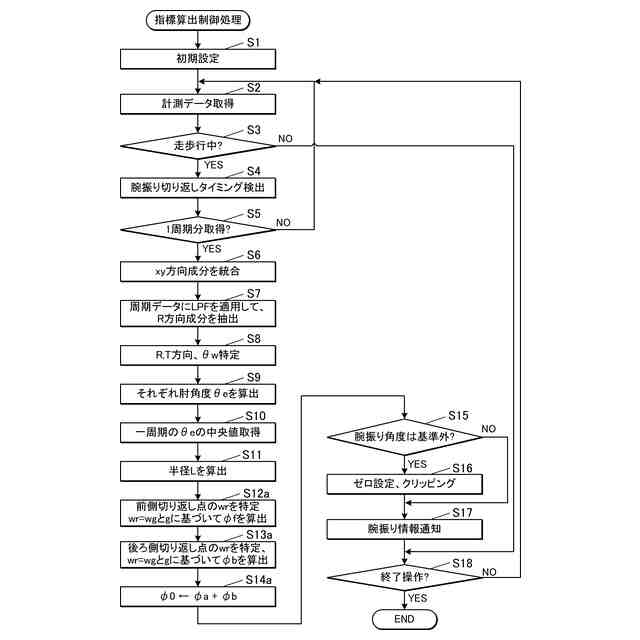
変形例の指標算出制御処理の制御手順を示すフローチャートである。
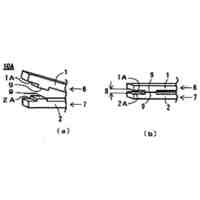
第2実施形態のセンサ構成について説明する図である。
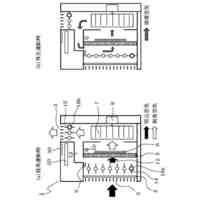
第2実施形態の腕振りに係る加速度について説明する図である。
第2実施形態のセンサ構成について説明する図である。
第2実施形態の指標算出制御処理の制御手順を示すフローチャートである。
第2実施形態の腕振り加速度算出処理の制御手順を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施の形態を図面に基づいて説明する。
[第1実施形態]
図1は、第1実施形態の計測システム100の全体構成を示す図である。
計測システム100は、電子機器1、4を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
歯の掃除具
2か月前
個人
錠剤撒き器
4か月前
個人
乗馬テラピー
2か月前
個人
身体牽引装置
2か月前
個人
塗り薬塗り具
1か月前
個人
染毛方法
1か月前
個人
健康器具
1か月前
個人
発熱器具
2か月前
個人
収納容器
1か月前
個人
鼻腔拡張具
4か月前
個人
挟圧手工爪矯正具
4か月前
株式会社コロナ
脱臭機
4か月前
個人
眼科診療車
7日前
個人
磁器治療器
2か月前
個人
動体視力強化装置
3か月前
東レ株式会社
吸収制御剤
1か月前
株式会社ナカニシ
生検針
2か月前
個人
口腔ケア用歯ブラシ
4か月前
個人
血管硬化度算出方法
3か月前
東レ株式会社
下肢着用具
2か月前
個人
避難困難者救出台車
7日前
株式会社ニデック
眼科装置
3か月前
個人
唾液分泌促進具
3か月前
個人
Dr.なかまつよい耳
1か月前
株式会社ニデック
眼科装置
4か月前
株式会社ニデック
眼科装置
4か月前
株式会社ファンケル
化粧料
2か月前
株式会社ダリヤ
皮膚洗浄剤
4か月前
株式会社ファンケル
化粧料
3か月前
株式会社ファンケル
化粧料
1か月前
株式会社ニデック
眼科装置
3か月前
株式会社MIC
陰茎補助具
1か月前
個人
立位姿勢支持具
1か月前
株式会社ニデック
眼科装置
3か月前
大正製薬株式会社
内服液剤
2か月前
株式会社ダリヤ
染毛料組成物
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ