TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025003217
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023103762
出願日
2023-06-23
発明の名称
操作装置および操作システム
出願人
コベルコ建機株式会社
代理人
デロイトトーマツ弁理士法人
主分類
E02F
9/20 20060101AFI20241226BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械を操作するオペレータに与えられる臨場感の向上を図ることができる操作装置等を提供する。
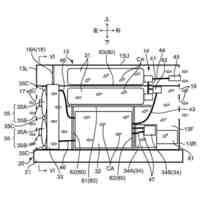
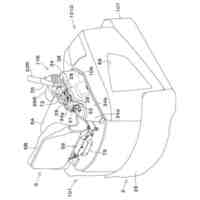
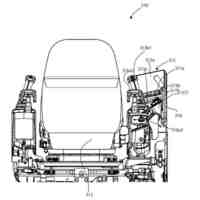
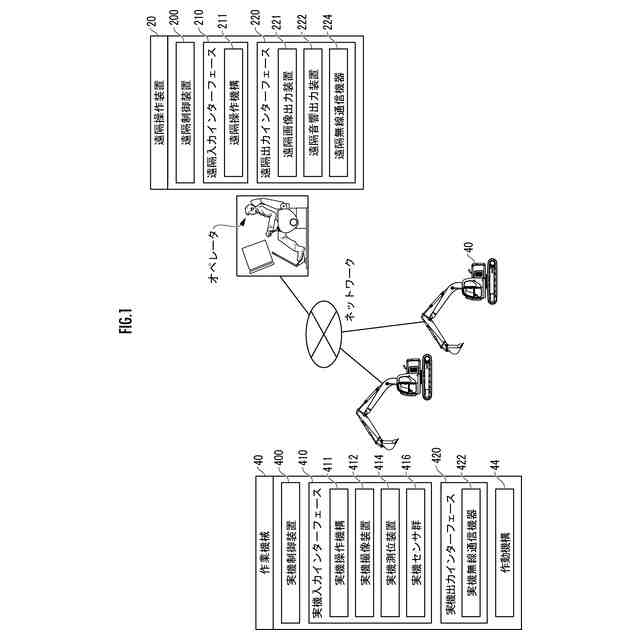
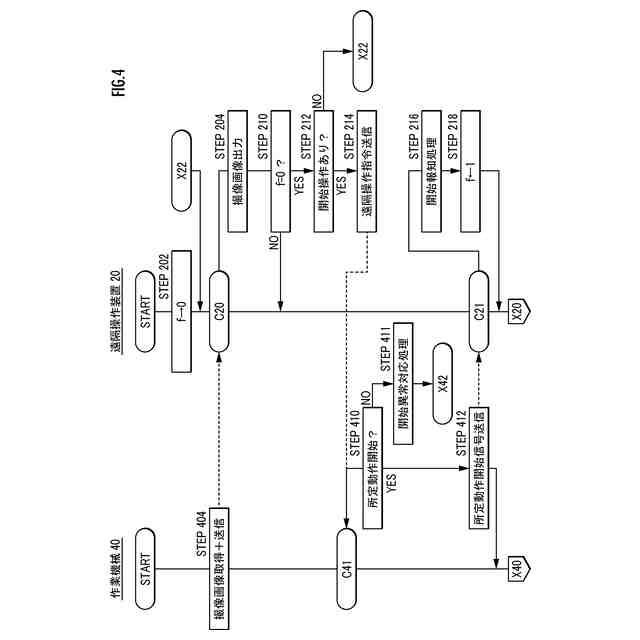
【解決手段】作業機械40に作業機構44等の作動機構の所定動作を開始させるための開始操作を遠隔操作機構211が受けたことを含む「開始条件」が満たされた場合、シート傾動機構等の報知装置によりシートStの傾動状態等が制御されることで「開始報知処理」が実行される。同様に、作業機械40に作業機構44等の作動機構の所定動作を終了させるための終了操作を遠隔操作機構211が受けたことを含む「終了条件」が満たされた場合、シート傾動機構等の報知装置によりシートStの傾動状態等が制御されることで「終了報知処理」が実行される。
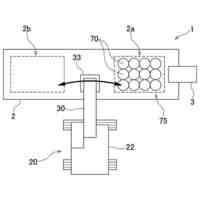
【選択図】図4
特許請求の範囲
【請求項1】
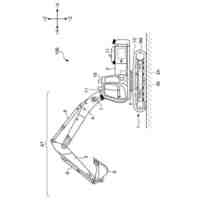
作動機構を有する作業機械を操作する操作装置であって、
前記操作装置は、オペレータによる操作を受ける操作機構と、前記オペレータに対して前記作業機械の状況を報知する報知装置と、を備え、
前記作業機械に前記作動機構の所定動作を開始させるための開始操作を前記操作機構が受けることを含んでいる開始条件、および、前記作業機械に前記作動機構の前記所定動作を終了させるための終了操作を前記操作機構が受けることを含む終了条件、のうち少なくとも一方が満たされた場合に前記報知装置が前記作業機械の状況を報知する
操作装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の操作装置において、
前記開始条件は、前記開始操作に基づいて前記作動機構が実際に前記所定動作を開始したことに関する情報を前記作業機械から受信することを含む
操作装置。
【請求項3】
請求項1に記載の操作装置において、
前記終了条件は、前記終了操作に基づいて前記作動機構が実際に前記所定動作を終了したことに関する情報を前記作業機械から受信することを含む
操作装置。
【請求項4】
請求項1に記載の操作装置において、
前記報知装置は、前記開始条件および前記終了条件のうち少なくとも一方が満たされてから所定時間が経過するまでの間において報知する
操作装置。
【請求項5】
請求項1に記載の操作装置において、
前記報知装置は、前記開始条件が満たされた場合と前記終了条件が満たされた場合とで、異なる形態で報知する
操作装置。
【請求項6】
請求項1に記載の操作装置において、
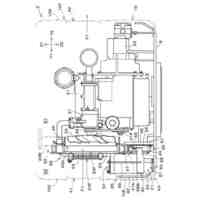
前記操作装置は、前記オペレータが着座するためのシート装置と、前記シート装置を傾斜させる駆動装置と、を備え、
前記報知装置は、前記駆動装置を用いて前記シート装置を傾斜させることにより前記作業機械の状況を報知する
操作装置。
【請求項7】
請求項1に記載の操作装置において、
前記操作装置は、画面を有する表示装置を備え、
前記報知装置は、前記画面を変化させることにより前記作業機械の状況を報知する
操作装置。
【請求項8】
請求項1に記載の操作装置において、
前記開始条件は、前記作動機構が有する保持機構に前記所定動作として物体を持ち上げた状態で保持する保持動作を開始させるための操作を前記開始操作として前記操作機構が受けることを含む
操作装置。
【請求項9】
請求項1に記載の操作装置において、
前記終了条件は、前記作動機構が有する保持機構に前記所定動作として物体を持ち上げた状態で保持する保持動作を終了させるための操作を前記終了操作として前記操作機構が受けることを含む
操作装置。
【請求項10】
請求項1に記載の操作装置において、
前記開始条件は、前記作動機構が有するアクチュエータの動作を開始させるための操作を前記開始操作として前記操作機構が受けることを含む
操作装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作動機構を有する作業機械を操作する操作装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
作業機械を遠隔操作する技術が提案されている(例えば、特許文献1参照)。油圧ショベル等の作業機械はオペレータの操作に基づいて動作される。オペレータが作業機械の運転室に搭乗している場合には、オペレータは作業機械の動作態様を直感的に把握することができる。
【先行技術文献】
【特許文献】
【0003】
特開2002-152399号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、従来技術1のようにオペレータが作業機械の外部にある遠隔操作装置を用いて作業機械を遠隔操作する場合には、オペレータは作業機械の動作態様を間接的に把握することになるため、オペレータに与えられる臨場感が不足する。
【0005】
そこで、本発明は、作業機械を操作するオペレータに与えられる臨場感の向上を図ることができる操作装置等を提供することを目的とする。
【課題を解決するための手段】
【0006】
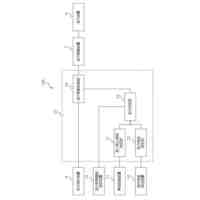
本発明の操作装置は、
作動機構を有する作業機械を操作する操作装置であって、
前記操作装置は、オペレータによる操作を受ける操作機構と、前記オペレータに対して前記作業機械の状況を報知する報知装置と、を備え、
前記作業機械に前記作動機構の所定動作を開始させるための開始操作を前記操作機構が受けることを含んでいる開始条件、および、前記作業機械に前記作動機構の前記所定動作を終了させるための終了操作を前記操作機構が受けることを含む終了条件、のうち少なくとも一方が満たされた場合に前記報知装置が前記作業機械の状況を報知する。
【0007】
当該構成の操作装置によれば、作業機械に作動機構の所定動作を開始させるための開始操作を操作機構が受けたことを含む「開始条件」および作業機械に作動機構の所定動作を終了させるための終了操作を操作機構が受けたことを含む「終了条件」のうち少なくとも一方が満たされた場合に報知装置により作業機械の状況が報知されることでオペレータに与えられる、当該作業機械に作動機構の所定動作を開始させた臨場感および/または当該作業機械に作動機構の所定動作を終了させた臨場感の向上が図られる。
【0008】
前記構成の操作装置において、
前記開始条件は、前記開始操作に基づいて前記作動機構が実際に前記所定動作を開始したことに関する情報を前記作業機械から受信することを含む
ことが好ましい。
【0009】
当該構成の操作装置によれば、開始操作を操作機構が受けたことに加えて、作業機械の作動機構が実際に所定動作を開始したことを含む開始条件が満たされた場合に、報知装置による報知により作業機械を操作するオペレータに臨場感が与えられる。このため、開始操作があったものの作動機構の所定動作が開始されていない状態で、作動機構の所定動作が開始されたかのような実際とは異なる臨場感がオペレータに与えられる事態が防止される。
【0010】
前記構成の操作装置において、
前記終了条件は、前記終了操作に基づいて前記作動機構が実際に前記所定動作を終了したことに関する情報を前記作業機械から受信することを含む
ことが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大林組
建築物
12日前
株式会社クボタ
作業機
5日前
鹿島建設株式会社
漂流物の捕捉構造
5日前
株式会社ジェック
水流方向切替装置
14日前
日本車輌製造株式会社
杭打機
9日前
株式会社テクアノーツ
通船ゲート装置
9日前
コベルコ建機株式会社
作業機械
9日前
株式会社クボタ
作業機
12日前
日立建機株式会社
作業機械
7日前
株式会社クボタ
作業機
12日前
株式会社クボタ
作業機
12日前
ヤンマーホールディングス株式会社
作業機械
12日前
株式会社クボタ
作業機
12日前
住友重機械工業株式会社
作業機械
21日前
住友重機械工業株式会社
ショベル
12日前
住友重機械工業株式会社
ショベル
12日前
日本植生株式会社
緑化土嚢袋
5日前
鹿島建設株式会社
建込み方法
1か月前
株式会社地盤リスク研究所
擁壁の補強工法
9日前
有限会社 櫂設計事務所
掘削・撹拌具
5日前
コベルコ建機株式会社
作業機械
6日前
大和ハウス工業株式会社
建物の建設方法
12日前
日之出水道機器株式会社
地下構造物用蓋
5日前
コベルコ建機株式会社
作業システム
5日前
大和ハウス工業株式会社
浸水推定装置
9日前
日鉄建材株式会社
透過型砂防堰堤の設計方法
14日前
コベルコ建機株式会社
作業システム
9日前
日本製鉄株式会社
堤防
12日前
井関農機株式会社
作業車両
6日前
清水建設株式会社
礫材の液状化対策構造
9日前
日立建機株式会社
作業車両
1か月前
一般財団法人電力中央研究所
地盤の状況計測装置
12日前
三陽機器株式会社
作業機の作業部連結構造
1か月前
株式会社大林組
判定支援システム及び判定支援方法
12日前
コベルコ建機株式会社
建設機械
8日前
株式会社日立建機ティエラ
建設機械
14日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ