TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025002377
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023102516
出願日
2023-06-22
発明の名称
加工システム、プログラム、非一時的な記録媒体、及び学習済みモデルの生成方法
出願人
株式会社ディスコ
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
H01L
21/301 20060101AFI20241226BHJP(基本的電気素子)
要約
【課題】キーパターンが設定されなくとも加工予定領域の位置に関する情報を得ることができる加工システムを提供する。
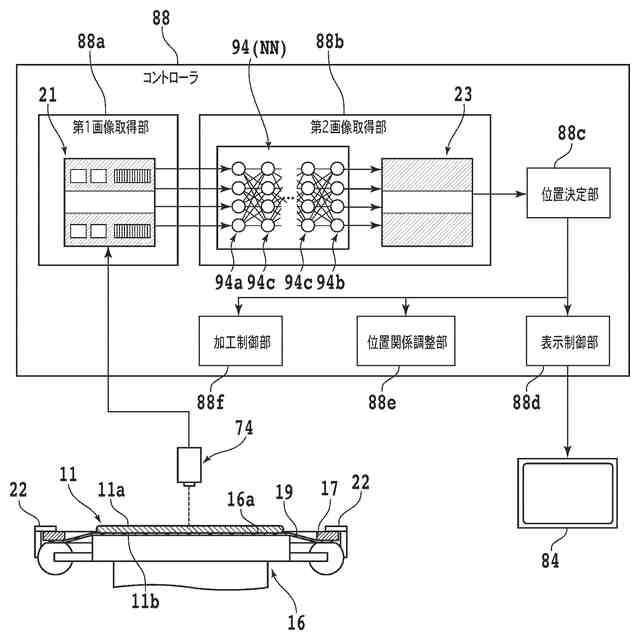
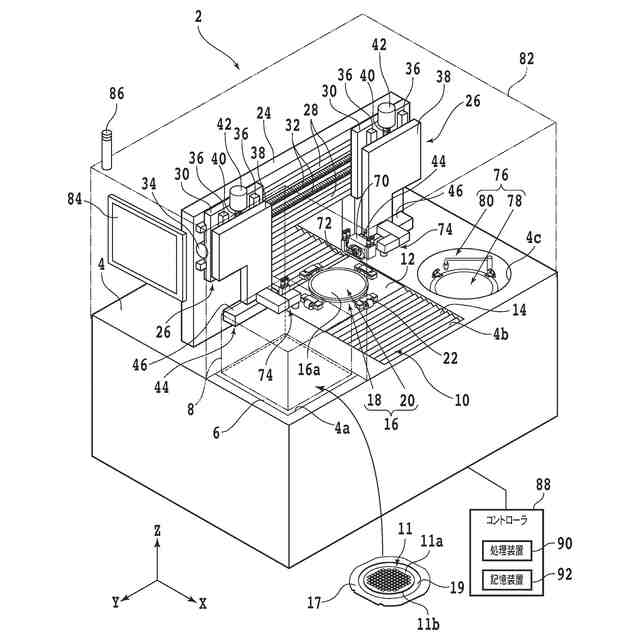
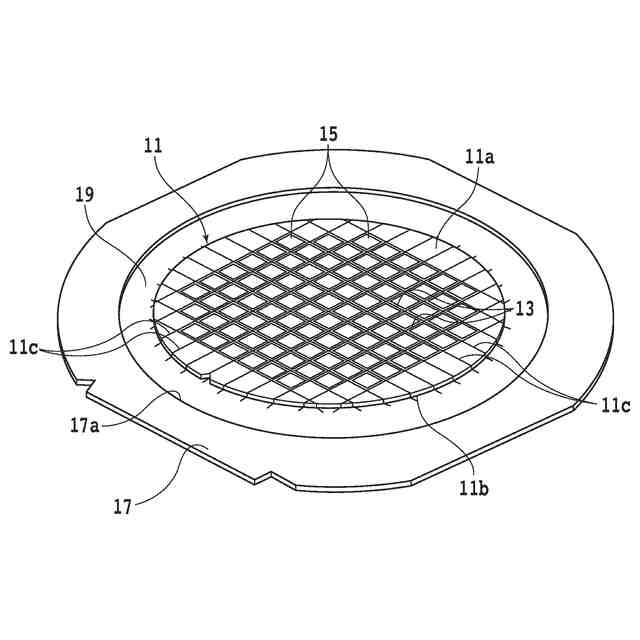
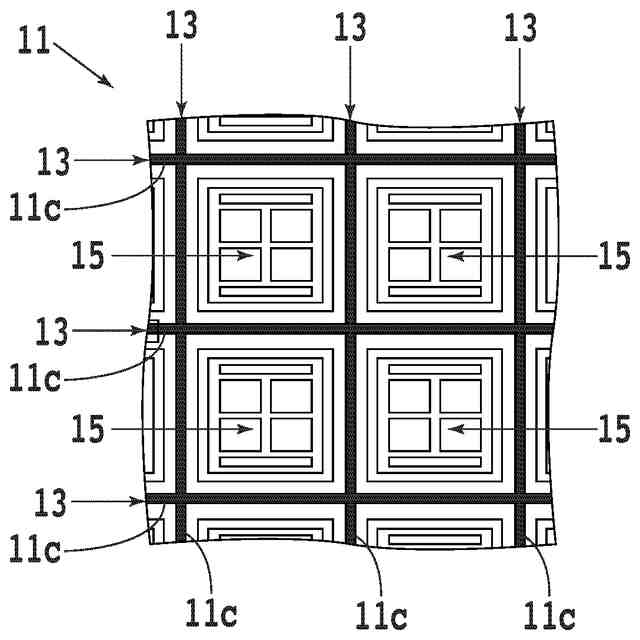
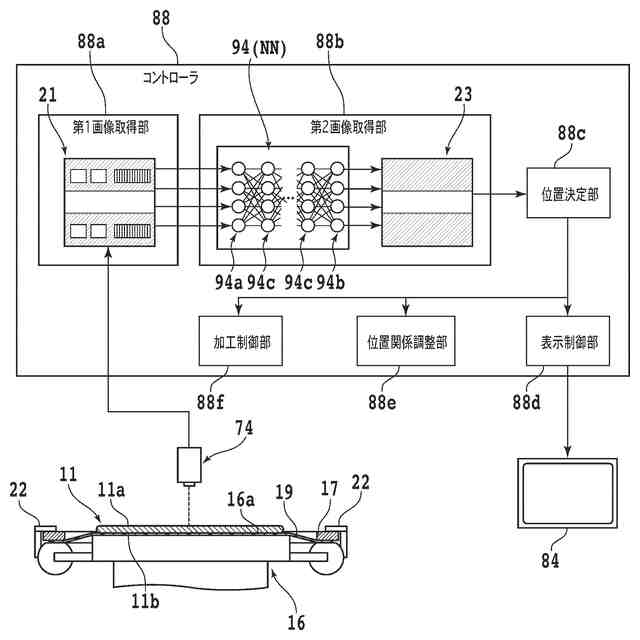
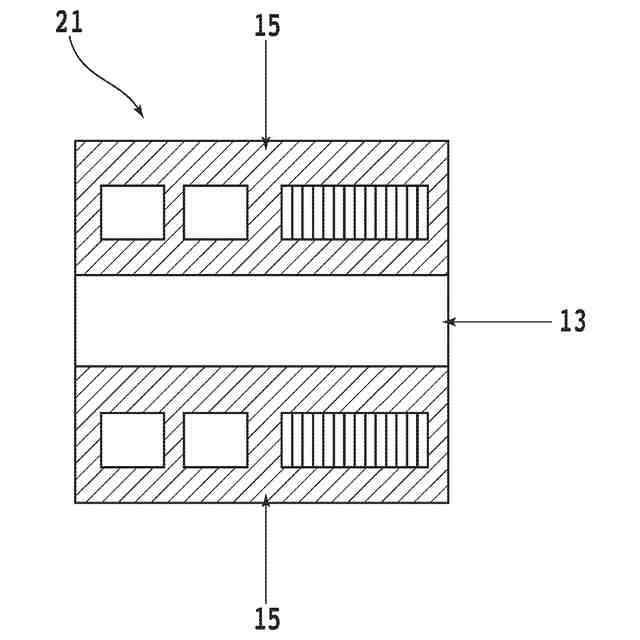
【解決手段】被加工物を加工するための加工システムであって、被加工物を保持するチャックテーブルと、チャックテーブルに保持された被加工物を加工する加工ユニットと、チャックテーブルに保持された被加工物を撮像する撮像ユニットと、処理装置及び記憶装置を有するコントローラと、を含み、記憶装置には、被加工物の写った第1画像が入力されると被加工物に設定されている直線状の加工予定領域の位置に関する情報を出力するように機械学習によって構成された学習済みモデルと、プログラムと、が記憶されている。
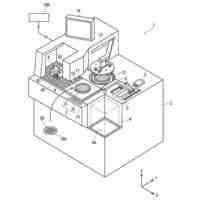
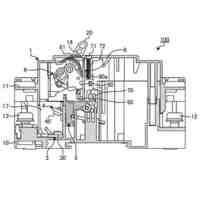
【選択図】図7
特許請求の範囲
【請求項1】
被加工物を加工するための加工システムであって、
該被加工物を保持するチャックテーブルと、
該チャックテーブルに保持された該被加工物を加工する加工ユニットと、
該チャックテーブルに保持された該被加工物を撮像する撮像ユニットと、
処理装置及び記憶装置を有するコントローラと、を含み、
該記憶装置には、該被加工物の写った第1画像が入力されると該被加工物に設定されている直線状の加工予定領域の位置に関する情報を出力するように機械学習によって構成された学習済みモデルと、プログラムと、が記憶されており、
該コントローラは、該プログラム及び該学習済みモデルに従い、
該チャックテーブルに保持された該被加工物を該撮像ユニットに撮像させて該第1画像を取得する手順と、
該第1画像から該加工予定領域の位置に関する該情報を取得する手順と、
該情報に基づき該加工ユニットに該加工予定領域を加工させる手順と、を実行する加工システム。
続きを表示(約 2,100 文字)
【請求項2】
該学習済みモデルは、該第1画像が入力される入力層と、該加工予定領域の位置に関する該情報を出力する出力層と、を含むニューラルネットワークである請求項1に記載の加工システム。
【請求項3】
該加工システムは、
該加工ユニットと該チャックテーブルとを加工送り方向に相対的に移動させる加工送り機構と、
該チャックテーブルを回転させる回転機構と、を更に含み、
該コントローラは、該プログラムに従い、
該加工予定領域の方向が該加工送り方向に対して平行になるように該情報に基づき該チャックテーブルを回転させる手順を更に実行する請求項1に記載の加工システム。
【請求項4】
該情報は、該加工予定領域のおおよその位置を示す第2画像であり、
該コントローラは、該プログラムに従い、
該第2画像に画像処理を施して該加工予定領域の外縁を検出する手順と、
検出された該外縁から該加工予定領域の幅の方向での中央の位置を算出する手順と、
該中央の位置を該加工ユニットに加工させる該加工予定領域の位置として設定する手順と、を更に実行する請求項1に記載の加工システム。
【請求項5】
被加工物を加工するための加工システムであって、
該被加工物を保持するチャックテーブルと、
該チャックテーブルに保持された該被加工物を加工する加工ユニットと、
該チャックテーブルに保持された該被加工物を撮像する撮像ユニットと、
それぞれが処理装置及び記憶装置を有する第1コントローラ及び第2コントローラと、を含み、
該第1コントローラの該記憶装置には、第1プログラムが記憶されており、
該第2コントローラの該記憶装置には、該被加工物の写った第1画像が入力されると該被加工物に設定されている直線状の加工予定領域の位置に関する情報を出力するように機械学習によって構成された学習済みモデルと、第2プログラムと、が記憶されており、
該第1コントローラは、該第1プログラムに従い、
該チャックテーブルに保持された該被加工物を該撮像ユニットに撮像させて該第1画像を取得する手順と、
該第1画像を該第2コントローラに送る手順と、
該第2コントローラから該加工予定領域の位置に関する該情報又はこれに基づく情報を受け取る手順と、
該第2コントローラから受け取った情報に基づき該加工ユニットに該加工予定領域を加工させる手順と、を実行し、
該第2コントローラは、該第2プログラム及び該学習済みモデルに従い、
該第1画像を該第1コントローラから受け取る手順と、
該第1画像から該加工予定領域の位置に関する該情報を取得する手順と、
該加工予定領域の位置に関する該情報又はこれに基づく情報を該第1コントローラに送る手順と、を実行する加工システム。
【請求項6】
該学習済みモデルは、該第1画像が入力される入力層と、該加工予定領域の位置に関する該情報を出力する出力層と、を含むニューラルネットワークである請求項5に記載の加工システム。
【請求項7】
該加工システムは、
該加工ユニットと該チャックテーブルとを加工送り方向に相対的に移動させる加工送り機構と、
該チャックテーブルを回転させる回転機構と、を更に含み、
該第1コントローラは、該第1プログラムに従い、
該加工予定領域の方向が該加工送り方向に対して平行になるように該情報に基づき該チャックテーブルを回転させる手順を更に実行する請求項5に記載の加工システム。
【請求項8】
該情報は、該加工予定領域のおおよその位置を示す第2画像であり、
該第1コントローラは、該第1プログラムに従い、
該第2画像に画像処理を施して該加工予定領域の外縁を検出する手順と、
検出された該外縁から該加工予定領域の幅の方向での中央の位置を算出する手順と、
該中央の位置を該加工ユニットに加工させる該加工予定領域の位置として設定する手順と、を更に実行する請求項5に記載の加工システム。
【請求項9】
被加工物に設定されている直線状の加工予定領域の位置に関する情報を得るためのプログラムであって、
該被加工物の写った第1画像が入力されると該被加工物に設定されている直線状の該加工予定領域の位置に関する情報を出力するように機械学習によって構成された学習済みモデルを含み、
該学習済みモデルに該第1画像を入力する手順と、
該学習済みモデルの演算を実行する手順と、をコンピュータに実行させるプログラム。
【請求項10】
該学習済みモデルは、該第1画像が入力される入力層と、該加工予定領域の位置に関する該情報を出力する出力層と、を含むニューラルネットワークである請求項9に記載のプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、被加工物を加工するための加工システム、被加工物の加工予定領域の位置に関する情報を得るためのプログラム、プログラムが記憶された非一時的な記録媒体、及び被加工物の加工予定領域の位置に関する情報を出力する学習済みモデルを生成するための学習済みモデルの生成方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
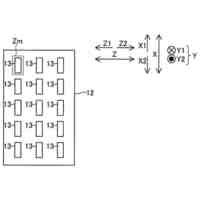
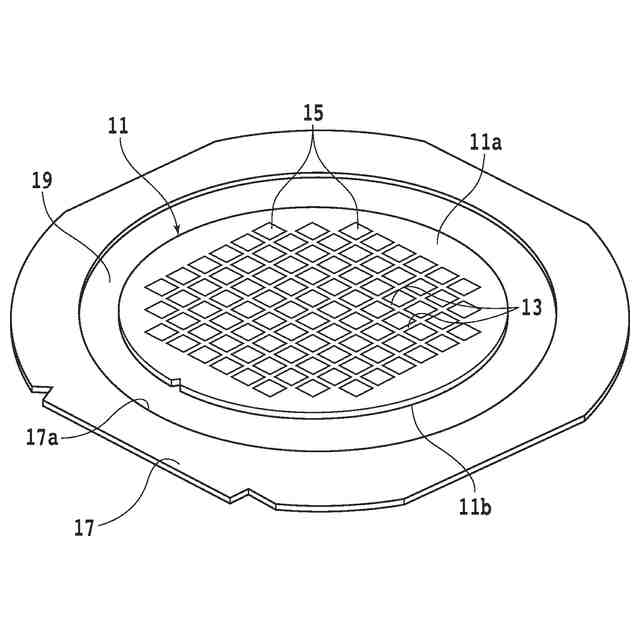
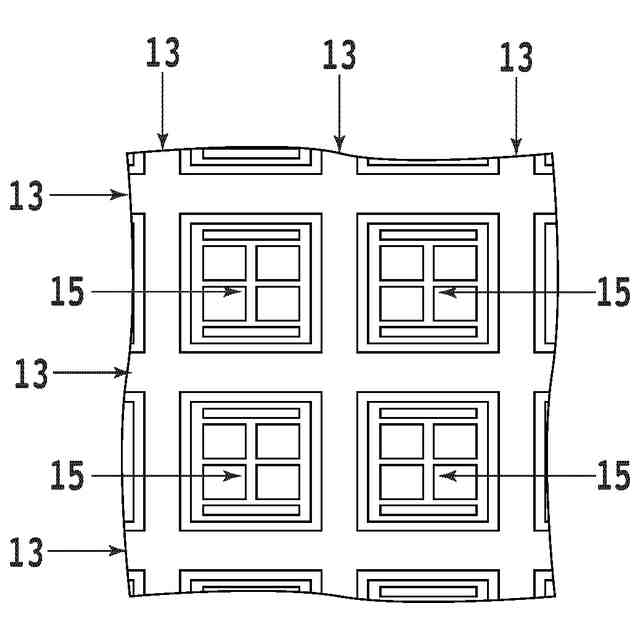
半導体ウェーハのような板状の被加工物を直線状の加工予定領域で加工する際には、被加工物を撮像して得られる画像から特徴的なパターンを抽出するパターンマッチングと呼ばれる方法により、被加工物中の加工予定領域の位置が加工装置により算出される(例えば、特許文献1参照)。加工装置は、算出された加工予定領域の位置に基づき、被加工物を高精度に加工する。
【0003】
この方法では、被加工物に設けられているデバイス等の特徴的なパターン(光学的に識別できる模様)が、加工装置のオペレータによりキーパターンとして選択され、事前に加工装置に設定される。キーパターンから加工予定領域までの距離は既知なので、加工装置は、設定されたキーパターンに類似するパターンを画像から抽出することにより、加工予定領域の位置を算出できる。
【先行技術文献】
【特許文献】
【0004】
特開2005-166991号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、上述したパターンマッチングでは、キーパターンに適した特徴的なパターンがオペレータにより選択され、加工装置に設定される必要がある。このため、例えば、オペレータの経験が浅く、適切なキーパターンが設定されない状況では、加工装置は、加工予定領域の位置を算出できず、被加工物を加工できない。
【0006】
よって、本発明の目的は、キーパターンが設定されなくとも加工予定領域の位置に関する情報を得ることができる加工システム等を提供することである。
【課題を解決するための手段】
【0007】
本発明の一側面によれば、被加工物を加工するための加工システムであって、該被加工物を保持するチャックテーブルと、該チャックテーブルに保持された該被加工物を加工する加工ユニットと、該チャックテーブルに保持された該被加工物を撮像する撮像ユニットと、処理装置及び記憶装置を有するコントローラと、を含み、該記憶装置には、該被加工物の写った第1画像が入力されると該被加工物に設定されている直線状の加工予定領域の位置に関する情報を出力するように機械学習によって構成された学習済みモデルと、プログラムと、が記憶されており、該コントローラは、該プログラム及び該学習済みモデルに従い、該チャックテーブルに保持された該被加工物を該撮像ユニットに撮像させて該第1画像を取得する手順と、該第1画像から該加工予定領域の位置に関する該情報を取得する手順と、該情報に基づき該加工ユニットに該加工予定領域を加工させる手順と、を実行する加工システムが提供される。
【0008】
好ましくは、該学習済みモデルは、該第1画像が入力される入力層と、該加工予定領域の位置に関する該情報を出力する出力層と、を含むニューラルネットワークである。
【0009】
また、好ましくは、該加工システムは、該加工ユニットと該チャックテーブルとを加工送り方向に相対的に移動させる加工送り機構と、該チャックテーブルを回転させる回転機構と、を更に含み、該コントローラは、該プログラムに従い、該加工予定領域の方向が該加工送り方向に対して平行になるように該情報に基づき該チャックテーブルを回転させる手順を更に実行する。
【0010】
また、好ましくは、該情報は、該加工予定領域のおおよその位置を示す第2画像であり、該コントローラは、該プログラムに従い、該第2画像に画像処理を施して該加工予定領域の外縁を検出する手順と、検出された該外縁から該加工予定領域の幅の方向での中央の位置を算出する手順と、該中央の位置を該加工ユニットに加工させる該加工予定領域の位置として設定する手順と、を更に実行する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ディスコ
加工具
3日前
株式会社ディスコ
搬送車
1日前
株式会社ディスコ
加工方法
1日前
株式会社ディスコ
研磨装置
1日前
株式会社ディスコ
製造方法
1日前
株式会社ディスコ
加工方法
1日前
株式会社ディスコ
保持テーブル
3日前
株式会社ディスコ
ウエーハの加工装置
1日前
株式会社ディスコ
被加工物の加工方法
2日前
株式会社ディスコ
加工装置、被加工物の加工方法
3日前
株式会社ディスコ
フレームガイドユニット及び搬送機構
1日前
株式会社ディスコ
位置合わせ用治具及び位置合わせ方法
1日前
株式会社ディスコ
チャックテーブルおよびエッジトリミング装置
1日前
株式会社ディスコ
水溶性保護膜の形成方法、及び板状物の加工方法
1日前
株式会社ディスコ
加工システム、プログラム、非一時的な記録媒体、及び学習済みモデルの生成方法
1日前
個人
電波吸収体
24日前
東レ株式会社
二次電池
15日前
愛知電機株式会社
変圧器
22日前
電建株式会社
端子金具
29日前
SMK株式会社
コネクタ
29日前
株式会社東光高岳
開閉器
1日前
株式会社水素パワー
接続構造
24日前
富士電機株式会社
半導体装置
29日前
三菱電機株式会社
端子カバー
15日前
太陽誘電株式会社
全固体電池
24日前
太陽誘電株式会社
全固体電池
3日前
株式会社カネカ
接着加工装置
24日前
三菱電機株式会社
回路遮断器
29日前
株式会社カネカ
接着加工装置
24日前
株式会社村田製作所
コイル部品
22日前
トヨタ自動車株式会社
二次電池
29日前
日本特殊陶業株式会社
保持装置
29日前
日機装株式会社
半導体発光装置
22日前
個人
電波散乱方向制御板
15日前
株式会社島津製作所
X線撮影装置
29日前
三洋化成工業株式会社
高分子固体電解質
24日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ