TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025001659
公報種別
公開特許公報(A)
公開日
2025-01-08
出願番号
2024098524
出願日
2024-06-19
発明の名称
流量制御システムおよび流量制御方法
出願人
日本軽金属株式会社
,
倉敷紡績株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
7/06 20060101AFI20241225BHJP(制御;調整)
要約
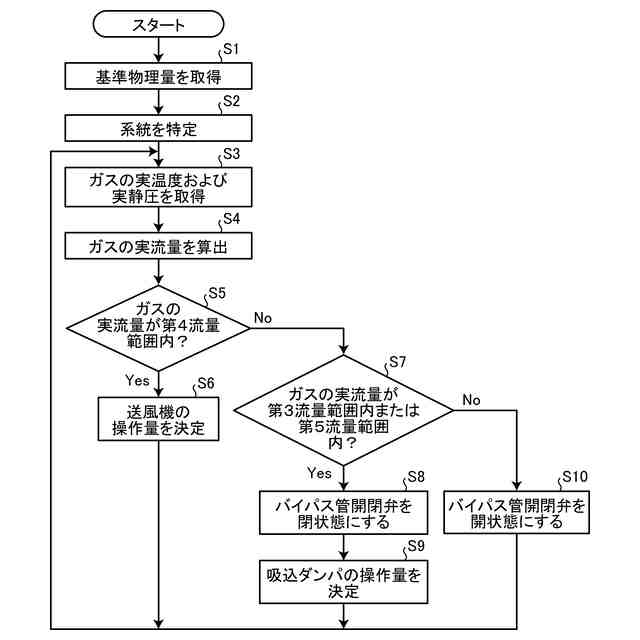
【課題】ガスの流量を調整する流量制御システムにおいて、サージング現象およびチョーキング現象の発生を抑制すること。
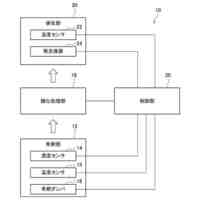
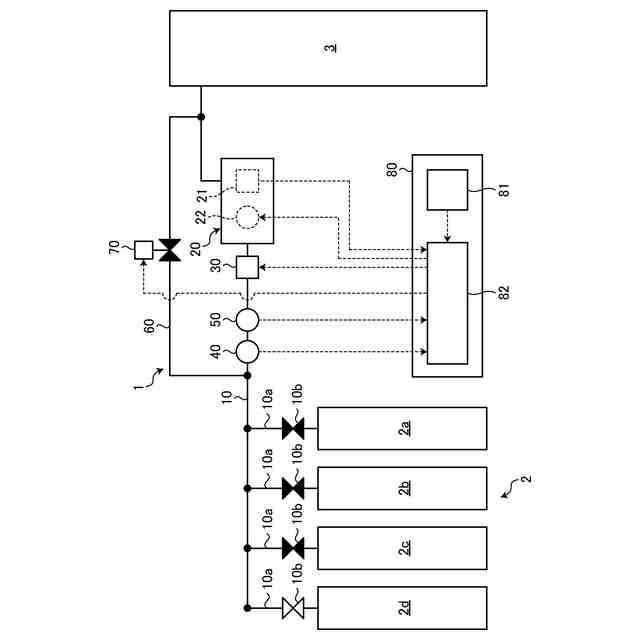
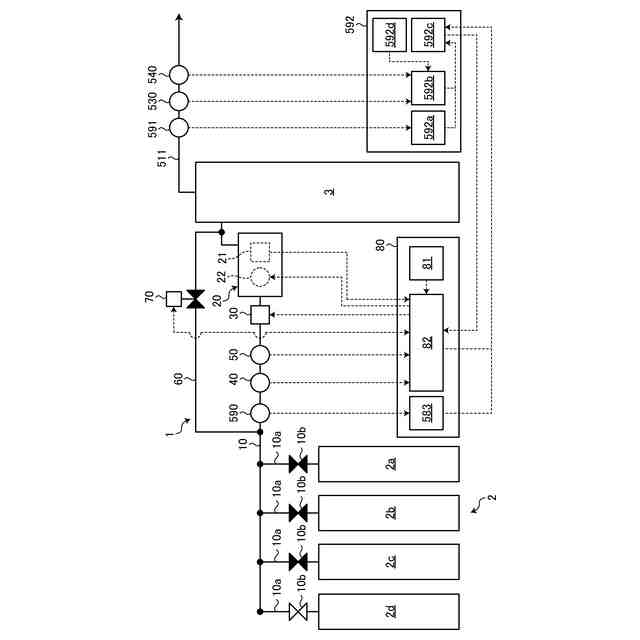
【解決手段】流量制御システム1の制御装置80は、ガス管10を流れるガスについて予め定められた基準の密度である基準密度、基準の速度である基準速度、基準の静圧である基準静圧、基準の温度である基準温度、および、送風機20が正常に動作するガスの流量の範囲である正常流量範囲を予め記憶し、圧力センサ50が検出するガスの実際の静圧である実静圧、温度センサ40が検出するガスの実際の温度である実温度、基準密度、基準速度、および、基準静圧を用いて、ガスの実際の流量である実流量を算出するとともに、実流量が正常流量範囲内にある場合に実流量と目標流量とを等しくするように送風機20の操作量を決定し、実流量が正常流量範囲外にある場合に実流量が正常流量範囲内の値となるように吸込ダンパ30の操作量を決定する。
【選択図】図1
特許請求の範囲
【請求項1】
ガスが流れるガス管と、
前記ガス管に配置され、前記ガスの流量を調整する第1流量調整部および第2流量調整部と、
前記ガス管において前記第1流量調整部の一次側かつ前記第2流量調整部の一次側に配置され、前記ガス管を流れる前記ガスの実際の静圧である実静圧を検出する圧力センサと、
前記ガス管において前記第1流量調整部の一次側かつ前記第2流量調整部の一次側に配置され、前記ガス管を流れる前記ガスの実際の温度である実温度を検出する温度センサと、
前記第1流量調整部および前記第2流量調整部を制御する制御装置と、を備え、
前記制御装置は、
前記ガスについて予め定められた基準の密度である基準密度、基準の速度である基準速度、基準の静圧である基準静圧、基準の温度である基準温度、および、前記第1流量調整部が正常に動作する前記ガスの流量の範囲である正常流量範囲を予め記憶し、
前記実静圧、前記実温度、前記基準密度、前記基準速度、前記基準静圧、および、前記基準温度を用いて、前記ガス管を流れる前記ガスの実際の流量である実流量を算出するとともに、
前記実流量が前記正常流量範囲内にある場合に前記実流量と目標流量とを等しくするように前記第1流量調整部の操作量を決定し、
前記実流量が前記正常流量範囲外にある場合に前記実流量が前記正常流量範囲内の値となるように前記第2流量調整部の操作量を決定する、
流量制御システム。
続きを表示(約 1,900 文字)
【請求項2】
前記ガス管において、前記第1流量調整部の一次側かつ前記第2流量調整部の一次側と前記第1流量調整部の二次側かつ前記第2流量調整部の二次側とを連結し、前記ガスが流れるバイパス管と、
前記バイパス管を開閉する開閉弁と、をさらに備え、
前記制御装置は、
前記ガスの流量が前記正常流量範囲より小さい所定の流量の範囲を予め記憶し、
前記実流量が前記正常流量範囲外にある場合に、前記所定の流量の範囲内まで前記実流量が減少したことに応じて、前記開閉弁を開状態にする、
請求項1に記載の流量制御システム。
【請求項3】
前記制御装置は、下記式(1)、式(2)、式(3)、式(4)、式(5)および式(6)を用いて前記実流量を算出する、
請求項1に記載の流量制御システム。
PT
0
=PS
0
+PD
0
…(1)
PD
0
=(ρ
0
×V
0
2
/2)×10
-3
…(2)
PS
1
’=PS
1
×(273.15+T
1
)/(273.15+T
0
) …(3)
PT
1
’=PS
1
’+(ρ
0
×V
1
2
/2)×10
-3
…(4)
PT
1
’=PT
0
×(V
1
/V
0
)
2
…(5)
Gw=A×V
1
…(6)
なお、
PT
0
は前記ガスの基準の全圧である基準全圧(単位:kPa)であり、
PS
0
は前記基準静圧(単位:kPa)であり、
PD
0
は前記ガスの基準の速度圧である基準速度圧(単位:kPa)であり、
ρ
0
は前記基準密度(単位:kg/m
3
)であり、
V
0
は前記基準速度(単位:m/s)であり、
PS
1
は前記実静圧(単位:kPa)であり、
T
1
は前記実温度(単位:℃)であり、
T
0
は前記基準温度(単位:℃)であり、
PS
1
【請求項4】
前記ガスは、硫黄を含み、
前記ガス管は、前記ガスを排出する工業炉と、前記ガスを脱硫するガス処理装置とを接続する、
請求項1に記載の流量制御システム。
【請求項5】
前記ガスは、窒素を含み、
前記ガス管は、前記ガスを排出する工業炉と、前記ガスを脱硝するガス処理装置とを接続する、
請求項1に記載の流量制御システム。
【請求項6】
前記ガスは、炭素を含み、
前記ガス管は、前記ガスを排出する工業炉と、前記炭素を回収するガス処理装置とを接続する、
請求項1に記載の流量制御システム。
【請求項7】
ガス管を流れ且つ第1流量調整部および第2流量調整部によって流量が調整されるガスにおいて前記ガス管を流れる前記ガスの実際の静圧である実静圧および前記ガスの実際の温度である実温度を検出する工程と、
前記実静圧および前記実温度を検出する工程で検出された前記実静圧および前記実温度、ならびに、前記ガスについて予め定められた基準の密度である基準密度、基準の速度である基準速度、基準の静圧である基準静圧、および、基準の温度である基準温度を用いて、前記ガスの実際の流量である実流量を算出する工程と、
前記実流量を算出する工程で算出された前記実流量が、前記第1流量調整部が正常に動作する前記ガスの流量の範囲である正常流量範囲内にあるか否かを判定する工程と、
前記実流量が前記正常流量範囲内であるか否かを判定する工程で前記実流量が前記正常流量範囲内にあると判定された場合に、前記実流量と目標流量とを等しくするように前記第1流量調整部の操作量を決定する工程と、
前記実流量が前記正常流量範囲内であるか否かを判定する工程で前記実流量が前記正常流量範囲外にあると判定された場合に、前記実流量が前記正常流量範囲内の値となるように前記第2流量調整部の操作量を決定する工程と、を含む、
流量制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、流量制御システムおよび流量制御方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
特許文献1には、送風機の一例として、吸気流量を制御するための入口案内翼、および、吐出部分に放風弁を備える遠心圧縮機が開示されている。特許文献1の送風機は、起動時において、吸気流量および吐出部分の圧力に基づいて、いわゆるサージング現象およびチョーキング現象の発生を回避するように、入口案内翼および放風弁それぞれの開度を適切に連動させて制御する。吸気流量(ガスの流量)が増加して吸気流量制御設定値(目標流量)に到達すると、特許文献1の送風機はガスの流量を目標流量で一定とするように入口案内翼を制御する。
【先行技術文献】
【特許文献】
【0003】
特開平9-303291号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、ガスの流量が目標流量に到達した後においても、例えば外的要因によって送風機の一次側のガスの圧力や温度が変動すると、サージング現象およびチョーキング現象が発生する可能性がある。このことは、ガスの流量を計測し、ガスの流量を調整する流量制御システムにおいても同様である。
【0005】
本開示は、上記の課題に鑑みてなされたものであって、ガスの流量を調整する流量制御システムにおいて、サージング現象およびチョーキング現象の発生を抑制することを目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成するため、本開示の一態様に係る流量制御システムは、ガスが流れるガス管と、前記ガス管に配置され、前記ガスの流量を調整する第1流量調整部および第2流量調整部と、前記ガス管において前記第1流量調整部の一次側かつ前記第2流量調整部の一次側に配置され、前記ガス管を流れる前記ガスの実際の静圧である実静圧を検出する圧力センサと、前記ガス管において前記第1流量調整部の一次側かつ前記第2流量調整部の一次側に配置され、前記ガス管を流れる前記ガスの実際の温度である実温度を検出する温度センサと、前記第1流量調整部および前記第2流量調整部を制御する制御装置と、を備え、前記制御装置は、前記ガスについて予め定められた基準の密度である基準密度、基準の速度である基準速度、基準の静圧である基準静圧、基準の温度である基準温度、および、前記第1流量調整部が正常に動作する前記ガスの流量の範囲である正常流量範囲を予め記憶し、前記実静圧、前記実温度、前記基準密度、前記基準速度、前記基準静圧、および、前記基準温度を用いて、前記ガス管を流れる前記ガスの実際の流量である実流量を算出するとともに、前記実流量が前記正常流量範囲内にある場合に前記実流量と目標流量とを等しくするように前記第1流量調整部の操作量を決定し、前記実流量が前記正常流量範囲外にある場合に前記実流量が前記正常流量範囲内の値となるように前記第2流量調整部の操作量を決定する。
【0007】
また、本開示の一態様に係る流量制御方法は、ガス管を流れ且つ第1流量調整部および第2流量調整部によって流量が調整されるガスにおいて前記ガス管を流れる前記ガスの実際の静圧である実静圧および前記ガスの実際の温度である実温度を検出する工程と、前記実静圧および前記実温度を検出する工程で検出された前記実静圧および前記実温度、ならびに、前記ガスについて予め定められた基準の密度である基準密度、基準の速度である基準速度、基準の静圧である基準静圧、および、基準の温度である基準温度を用いて、前記ガスの実際の流量である実流量を算出する工程と、前記実流量を算出する工程で算出された前記実流量が、前記第1流量調整部が正常に動作する前記ガスの流量の範囲である正常流量範囲内にあるか否かを判定する工程と、前記実流量が前記正常流量範囲内であるか否かを判定する工程で前記実流量が前記正常流量範囲内にあると判定された場合に、前記実流量と目標流量とを等しくするように前記第1流量調整部の操作量を決定する工程と、前記実流量が前記正常流量範囲内であるか否かを判定する工程で前記実流量が前記正常流量範囲外にあると判定された場合に、前記実流量が前記正常流量範囲内の値となるように前記第2流量調整部の操作量を決定する工程と、を含む。
【発明の効果】
【0008】
本開示の流量制御システムによれば、サージング現象およびチョーキング現象の発生を抑制することができる。
【図面の簡単な説明】
【0009】
図1は、本開示の実施形態に係る流量制御システムの構成を示す模式図である。
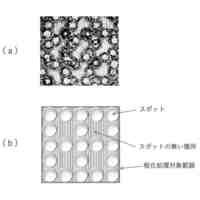
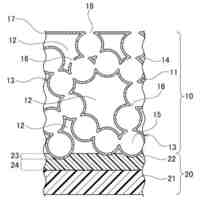
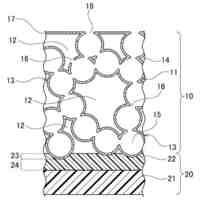
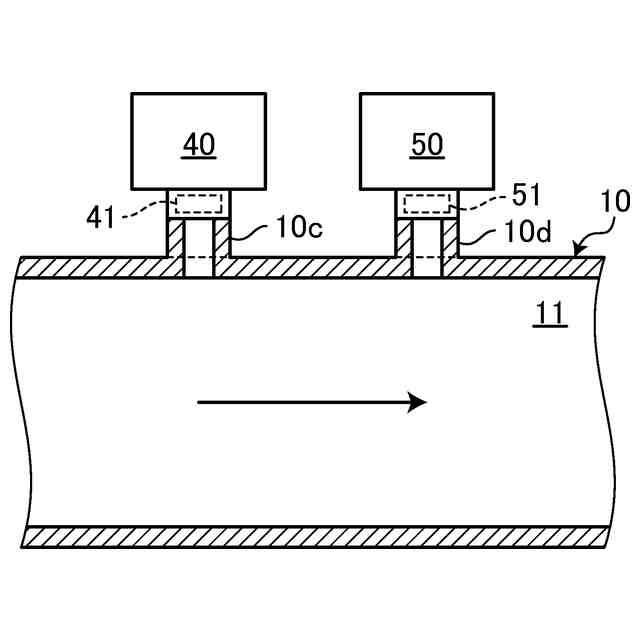
図2は、図1に示す温度センサおよび圧力センサを示す模式図である。
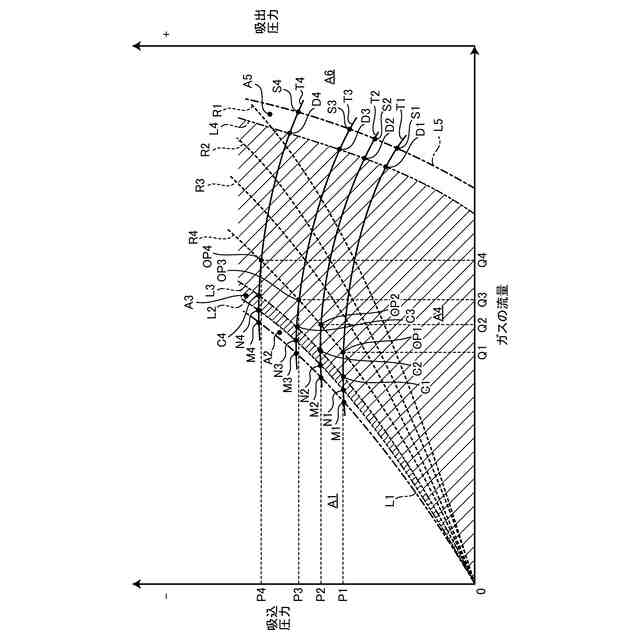
図3は、ガスの流量と送風機の吸込圧力と送風モータの回転数との関係を示す図である。
図4は、流量制御部が実流量を算出し、送風機の操作量およびダンパの操作量を決定するときに実行するフローチャートである。
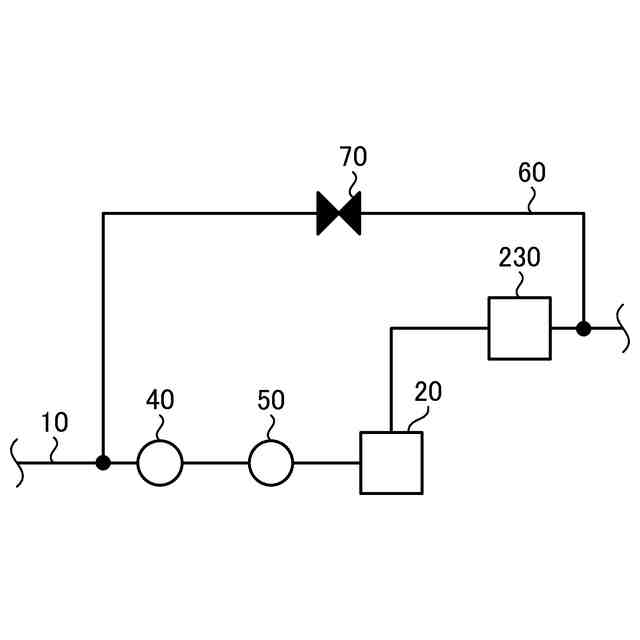
図5は、本開示の実施形態の第1変形例に係る流量制御システムの構成を示す模式図である。
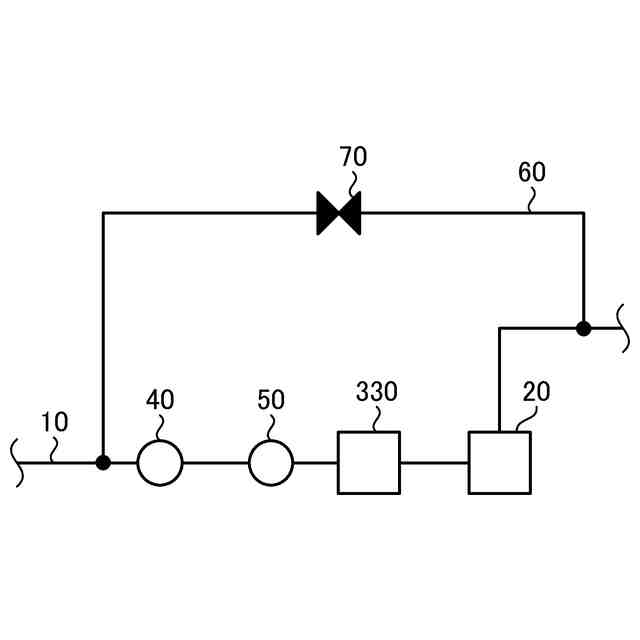
図6は、本開示の実施形態の第2変形例に係る流量制御システムの構成を示す模式図である。
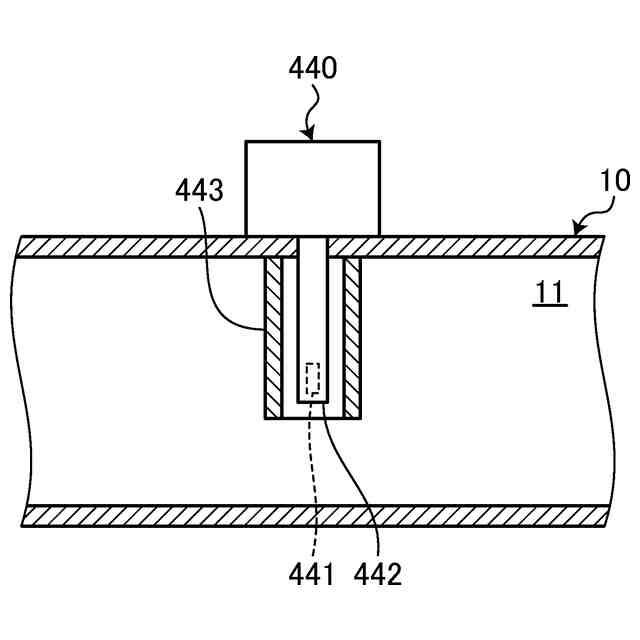
図7は、本開示の実施形態の第3変形例に係る流量制御システムの温度センサを示す模式図である。
図8は、本開示の実施形態の第4変形例に係る流量制御システムの構成を示す図である。
【発明を実施するための形態】
【0010】
以下に、本開示の各実施の形態について、図面を参照しつつ説明する。以下の実施形態に記載した内容により本開示が限定されるものではない。また、以下に記載した構成要素には、当業者が容易に想定できるもの、実質的に同一のものが含まれる。さらに、以下に記載した構成要素は適宜組み合わせることが可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本軽金属株式会社
遮音壁
6日前
日本軽金属株式会社
接合方法
5日前
日本軽金属株式会社
外観ムラ抑制部材
5日前
日本軽金属株式会社
外観ムラ抑制部材
5日前
日本軽金属株式会社
蓋体及びその製造方法
5日前
日本軽金属株式会社
撥液部材及びその製造方法
5日前
日本軽金属株式会社
撥液部材及びその製造方法
5日前
日本軽金属株式会社
めっき部材及びその製造方法
今日
日本軽金属株式会社
脱臭制御システム及び脱臭制御方法
12日前
日本軽金属株式会社
ヒートパイプ及び、ヒートパイプの製造方法
5日前
日本軽金属株式会社
板状アルミナ粉末及びその製造方法、並びに塗料又は化粧品
5日前
日本軽金属株式会社
分析用担体、イムノクロマトグラフィー用テストストリップ及び分析用担体の製造方法
5日前
日本軽金属株式会社
分析用担体、イムノクロマトグラフィー用テストストリップ及び分析用担体の製造方法
5日前
個人
生産早送り装置
2か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社カネカ
製造システム
1か月前
オムロン株式会社
スレーブ装置
16日前
株式会社熊谷組
障害物の検出方法
7日前
株式会社FUJI
加工機械ライン
2か月前
愛知製鋼株式会社
車両用システム
1か月前
ローム株式会社
基準電圧源
1か月前
新電元工業株式会社
作業用ロボット
5日前
個人
作業車両自動化システム
2か月前
豊田合成株式会社
機器制御装置
12日前
愛知製鋼株式会社
目標軌跡の設定方法
2か月前
トヨタ自動車株式会社
生産管理システム
2か月前
株式会社ダイフク
搬送設備
26日前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
移動制御システム
2か月前
トヨタ自動車株式会社
減圧弁
2か月前
キヤノン電子株式会社
加工装置、及び、制御方法
3か月前
株式会社オプトン
制御プログラム生成装置
3か月前
株式会社鷺宮製作所
制御装置
3か月前
エイブリック株式会社
電流補償回路及び半導体装置
1日前
トヨタ自動車株式会社
クラッチペダル
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ