TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024178862
公報種別
公開特許公報(A)
公開日
2024-12-25
出願番号
2023097342
出願日
2023-06-13
発明の名称
エレベータ内ロボット乗降システム
出願人
株式会社CAOS
代理人
個人
,
個人
主分類
G05D
1/43 20240101AFI20241218BHJP(制御;調整)
要約
【課題】エレベータ内ロボット乗降システムを提供する。
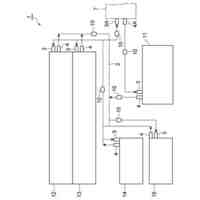
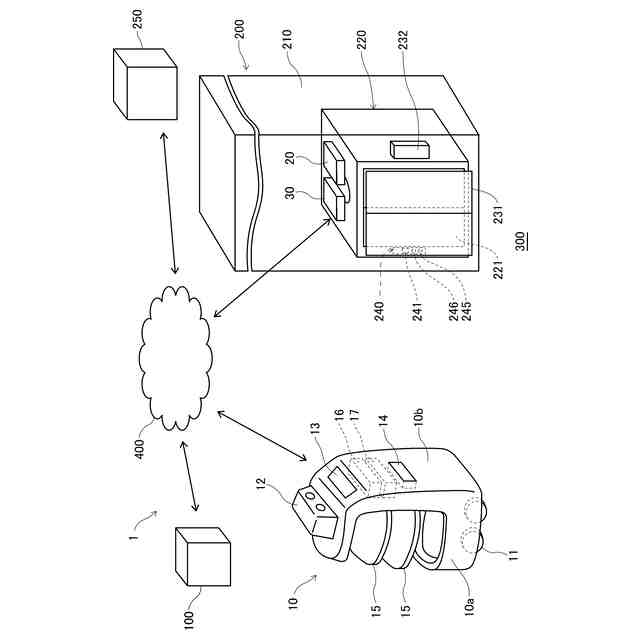
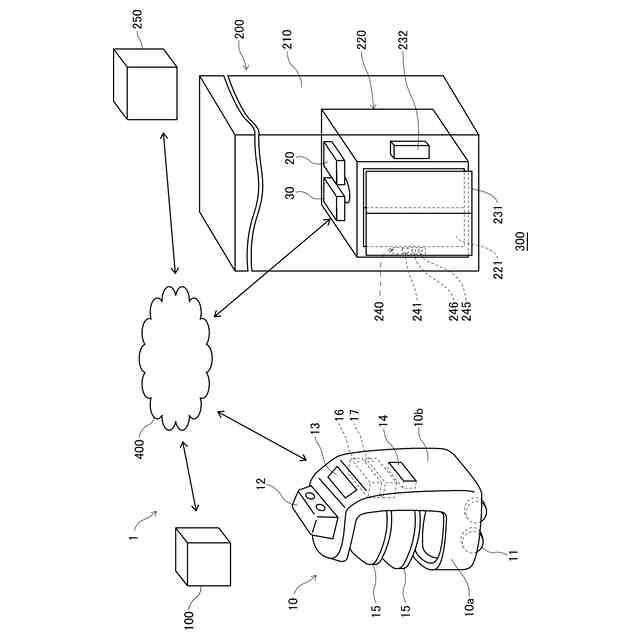
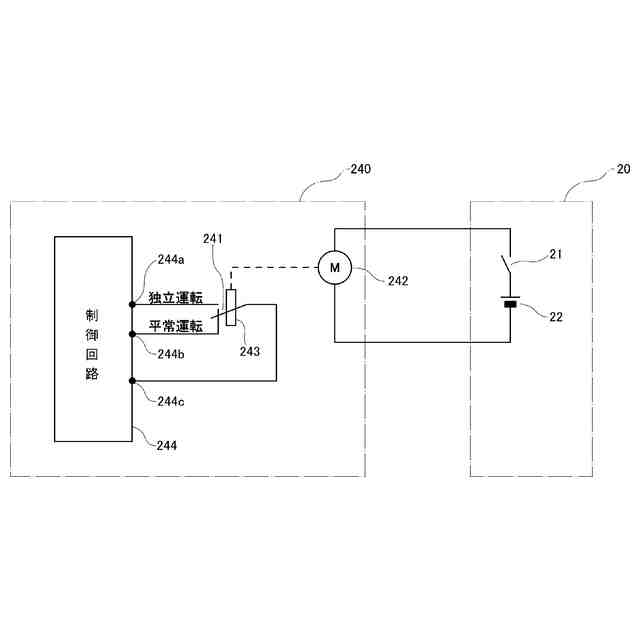
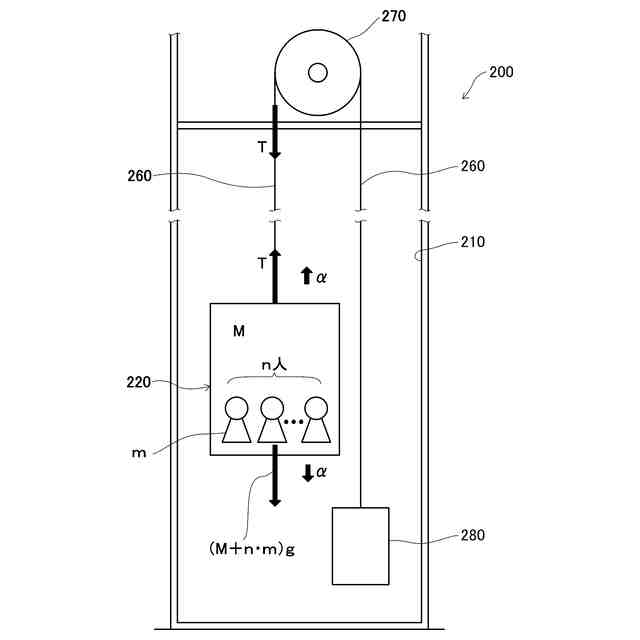
【解決手段】エレベータ200のかご220に取り付けてエレベータの運転情報を入手し、かご内の乗客の在否情報を送信するとともにかごの運転を独立運転モードに切り替え可能に構成されたエレベータ制御ボックス20と、エレベータ制御ボックスが入手した運転情報を交信するルータ30と、ルータからの運転情報を入手する通信手段16、移動する周囲環境の撮像データを得るカメラ12、及び周囲の障害物までの距離を得る障害物センサ14を有し、あらかじめ取得したマップ情報と障害物センサ情報との照合を行うことにより現在位置を推定して目的地に移動するとともに、かご内の乗客の在否情報、及び/又はかご内への移動通路の撮像データに基づきかご内へ乗車する者が居ないと判定したときに、かご内に乗車するロボット10と、ロボットに行先指示情報を交信するサーバ100と、を有する構成とした。
【選択図】図1
特許請求の範囲
【請求項1】
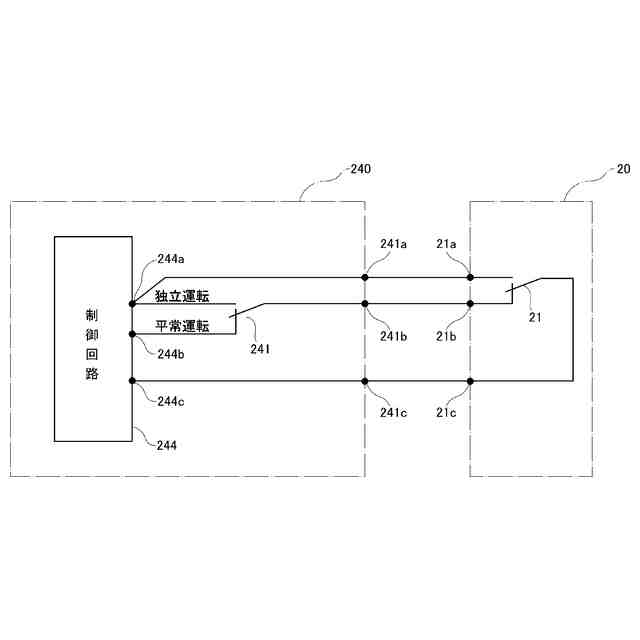
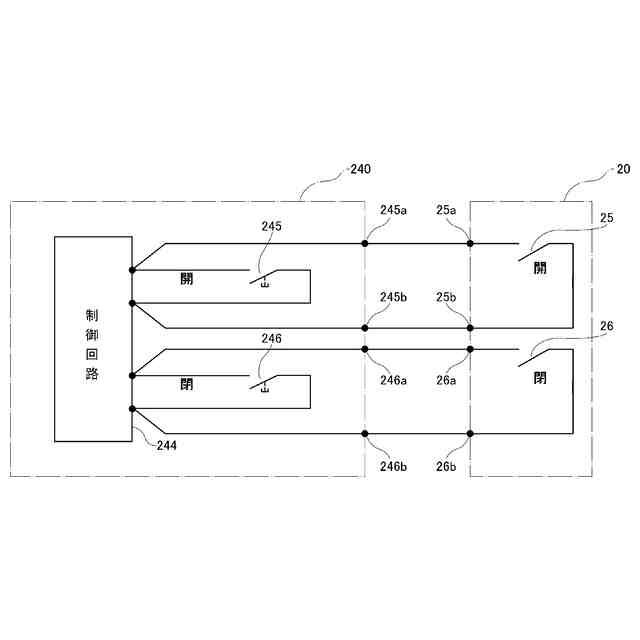
エレベータのかごに取り付けて前記エレベータの運転情報を入手し、前記かご内の乗客の在否情報を送信するとともに前記かごの運転を独立運転モードに切り替え可能に構成されたエレベータ制御ボックスと、
前記エレベータ制御ボックスが入手した前記運転情報を交信するルータと、
前記ルータからの前記運転情報を入手する通信手段、移動する周囲環境の撮像データを得るカメラ、及び周囲の障害物までの距離を得る障害物センサを有し、あらかじめ取得したマップ情報と前記障害物センサ情報との照合を行うことにより現在位置を推定して目的地に移動するとともに、前記かご内の乗客の在否情報、及び/又は前記かご内への移動通路の撮像データに基づき前記かご内へ乗車する者が居ないと判定したときに前記かご内に乗車するロボットと、
前記ロボットに行先指示情報を交信するサーバと、
を有することを特徴とするエレベータ内ロボット乗降システム。
続きを表示(約 240 文字)
【請求項2】
前記移動通路の撮像データは、前記エレベータドアの開扉空間を検知対象とするよう構成されたことを特徴とする請求項1に記載のエレベータ内ロボット乗降システム。
【請求項3】
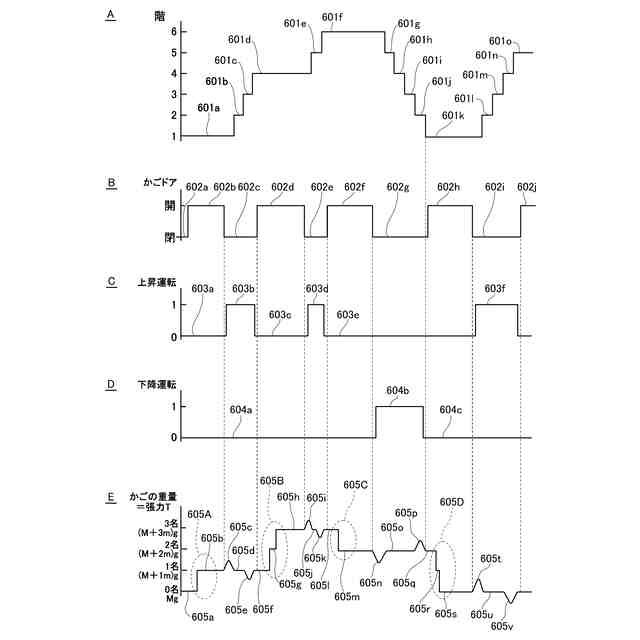
前記エレベータ制御ボックスは、前記かごの所定時間遡った区間内の所定回数のサンプリングにより得られた重量データの回帰直線の傾きを算出し、前記算出値が所定の閾値の範囲内にあるときに、前記かご内に乗客等が居ないと判定することを特徴とする請求項1に記載のエレベータ内ロボット乗降システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、エレベータのかご内の乗客の在否を判定してロボットが乗降するエレベータ内ロボット乗降システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、人手不足や感染症対策などによりホテルや病院などの多層階施設において、ロボットによる無人配達のニーズが高まっている。このようなニーズを実現するには、ロボットがエレベータの運転状況を把握するとともに、かごへの乗車可否を判定してロボット自らが乗降する機能を実現することが必須である。
【0003】
ロボット自らがかごに乗降するためには、かご内の乗客の在否を判定する必要がある。仮に、かご内の乗客の在否判定をしなかった場合には、エレベータのかご内に人が乗っている場合でも、ロボットがかご内に強引に入ろうとしてしまい不測のトラブルを生じるおそれがある。また、エレベータの乗場において、かご内へ人が乗車しようとしているか否かを識別する機能を実現することも必要となる。
【0004】
さらに、かかる機能を実現するうえで、ホテルや病院等の設備の改造や機器の追加設置等をできる限り少なくできるように構成することが望ましい。
【0005】
特許文献1には、複数台のロボットに対してエレベータを利用して移動先の指示・管理を行わせるためのエレベータ管理装置、情報処理装置、エレベータ管理システム及びエレベータ管理装置の制御方法が開示されている。具体的には、エレベータ管理装置は、エレベータの運転状況に基づいて、ロボットの各々が所望の移動先に到着するまでの時間を算出し、算出した時間に基づいて少なくとも1つのロボットを特定する。そして、特定したロボットが所望の移動先まで移動するために利用可能なエレベータに関する情報を含む移動先情報を出力するよう構成されている。
【0006】
また、特許文献2には、地図情報に基づく走行経路を走行するロボットと、ロボットを搬送するエレベータと、地図情報を蓄積するサーバとを備え、サーバは、エレベータがロボットを搬送する際に、ロボットに対し、エレベータによって搬送された先のエリアの地図情報を送信する地図送信部を有する地図情報配信システム及び地図情報配信方法が開示されている。
【0007】
また、特許文献3には、遠隔制御や建物オーナーの依頼により設定状態の変更を行う監視センターと、建物内を移動するロボットで構成されたエレベータの遠隔制御システムが開示されている。具体的には、ロボットが建物の無線設備を利用し、監視センターに設けられる監視センターサーバ経由でエレベータに対しロボットが現在居る階と、目的階と、移動予定時刻を送信し、受信したエレベータはその時刻に、ロボットが現在居る階へかごを移動させ、続いて目的階へ移動するといった一連の制御を行うものである。
【先行技術文献】
【特許文献】
【0008】
特開2021-31264号公報
特開2021-113917号公報
特開2021-70578号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1に記載の技術にあっては、稼働中の複数台のロボットに対して、その中の特定のロボットへの移動制御及び管理を行うため移動先情報をそのロボットに与えて、そのロボットが所望の移動先まで移動可能とするよう構成されている。しかしながら、この特許文献1の技術では、エレベータのかご内へロボットが乗降して異なるフロアへの移動を自由に行うための具体的なシステムを得ることができるとはいえない。
【0010】
また、特許文献2に記載の技術は、エレベータでロボットを搬送する際の移動先のフロアのエリアに関する地図情報を送信して提供するものであり、自己位置推定や経路追従が円滑に行えるようにするためのものである。従って、この特許文献2に記載された技術では、エレベータのかご内へロボットが乗降して異なるフロアへの移動を自由に行うための具体的なシステムを得ることができるとはいえない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
2か月前
個人
無人作業システム
11日前
ugo株式会社
移動体
2か月前
アズビル株式会社
制御装置
4日前
村田機械株式会社
産業機械
25日前
株式会社ダイヘン
移動体
2か月前
株式会社ダイヘン
移動体
2か月前
神港テクノス株式会社
制御装置
2か月前
トヨタ自動車株式会社
自律移動体
2か月前
コフロック株式会社
流量制御装置
5日前
トヨタ自動車株式会社
自律移動体
25日前
トヨタ自動車株式会社
搬送ロボット
3か月前
株式会社丸和製作所
入力機器
4日前
株式会社クボタ
作業車
25日前
トヨタ自動車株式会社
配送システム
2か月前
株式会社明電舎
車両
25日前
アズビル株式会社
パラメータ調整装置
1か月前
株式会社フジキン
流体制御装置
2か月前
株式会社フジキン
流量制御装置
4日前
トヨタ自動車株式会社
ロボットシステム
25日前
トヨタ自動車株式会社
自律移動システム
2か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
ロボットシステム
1か月前
トヨタ自動車株式会社
位置推定システム
2か月前
株式会社ダイフク
搬送設備
12日前
株式会社村田製作所
温度補償回路
11日前
株式会社FUJI
工作機械の操作システム
2か月前
株式会社ダイフク
物品搬送設備
12日前
株式会社ダイフク
物品搬送設備
12日前
ローム株式会社
電源回路
2か月前
株式会社ダイフク
物品搬送設備
2か月前
ローム株式会社
電源回路
1か月前
キヤノン株式会社
情報処理装置
1か月前
株式会社ダイフク
物品搬送設備
18日前
CKD日機電装株式会社
モデルフリーポジカスト制御
3か月前
村田機械株式会社
搬送車システム
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ