TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024177950
公報種別
公開特許公報(A)
公開日
2024-12-24
出願番号
2023096394
出願日
2023-06-12
発明の名称
検査支援装置及び検査支援方法
出願人
株式会社日立製作所
代理人
弁理士法人湘洋特許事務所
主分類
G01N
21/84 20060101AFI20241217BHJP(測定;試験)
要約
【課題】作業者が効率的にワークの検査を行えるようにする。
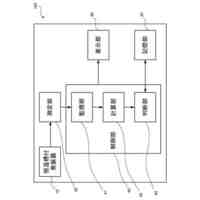
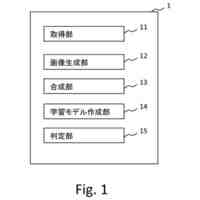
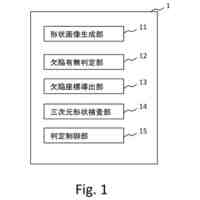
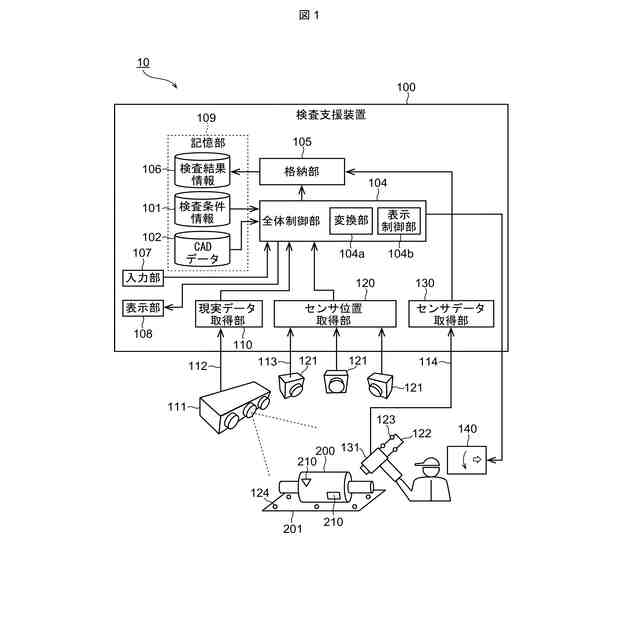
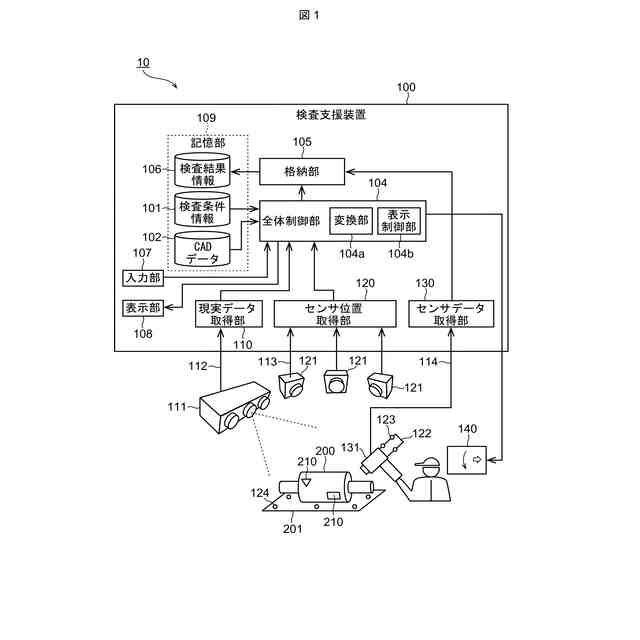
【解決手段】検査支援装置は、現実空間内に置かれたワークの形状、位置、及び姿勢を示す現実データを取得する現実データ取得部と、前記ワークの設計上の形状を示す設計データ上の検査位置に対して、前記設計データを前記現実データに重ねる変換操作を施すことにより、現実空間における前記ワーク上での検査位置を算出する変換部と、前記ワークを検査するセンサの現実空間での位置を取得するセンサ位置取得部と、現実空間における前記ワーク上での前記検査位置と、前記センサの前記位置との差が許容位置ずれ範囲内に収まる方向を、前記センサを移動させる方向として表示装置に表示させる表示制御部とを有する。
【選択図】図1
特許請求の範囲
【請求項1】
現実空間内に置かれたワークの形状、位置、及び姿勢を示す現実データを取得する現実データ取得部と、
前記ワークの設計上の形状を示す設計データ上の検査位置に対して、前記設計データを前記現実データに重ねる変換操作を施すことにより、現実空間における前記ワーク上での検査位置を算出する変換部と、
前記ワークを検査するセンサの現実空間での位置を取得するセンサ位置取得部と、
現実空間における前記ワーク上での前記検査位置と、前記センサの前記位置との差が許容位置ずれ範囲内に収まる方向を、前記センサを移動させる方向として表示装置に表示させる表示制御部と、
を有する検査支援装置。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の検査支援装置であって、
前記変換部は、前記変換操作により前記設計データ上における検査方向を現実空間における前記ワーク上での検査方向に変換し、
前記センサ位置取得部は、前記センサが向いている方向を取得し、
前記表示制御部は、現実空間における前記ワーク上での前記検査方向と前記センサが向いている前記方向とがなす角度が許容角度範囲内に収まる方向を、前記センサを振る方向として前記表示装置に表示させる、
検査支援装置。
【請求項3】
請求項1に記載の検査支援装置であって、
前記設計データ上の前記検査位置と、当該検査位置における検査結果とを関連つけて記憶部に格納する格納部、
を更に有する検査支援装置。
【請求項4】
請求項1に記載の検査支援装置であって、
前記現実データ取得部は、現実空間における前記ワークの前記形状、前記位置、及び前記姿勢を測定する三次元測定器から前記現実データを取得する、
検査支援装置。
【請求項5】
請求項1に記載の検査支援装置であって、
前記変換部は、前記変換操作として前記設計データに対して回転操作と並進操作とを施し、変換後の前記設計データと前記現実データとの偏差が最小となるような前記変換操作を前記検査位置に対して施す、
検査支援装置。
【請求項6】
請求項1に記載の検査支援装置であって、
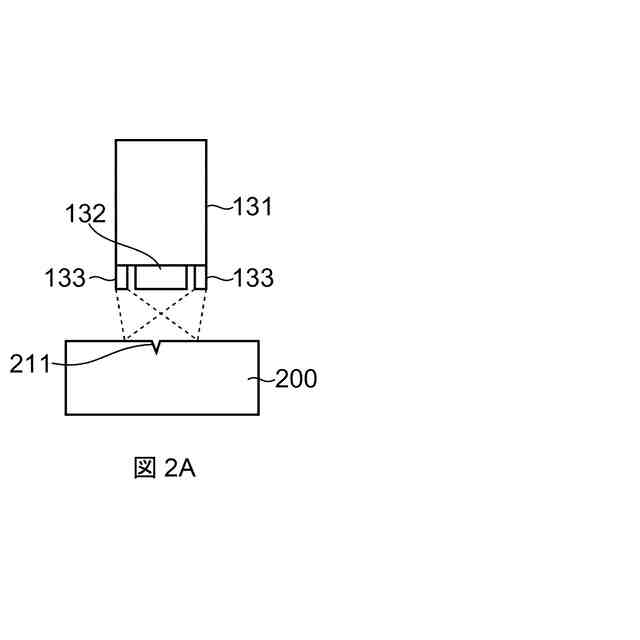
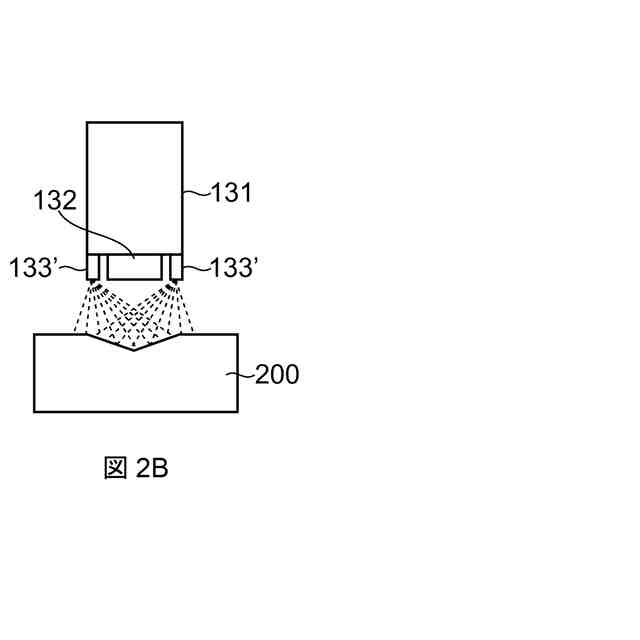
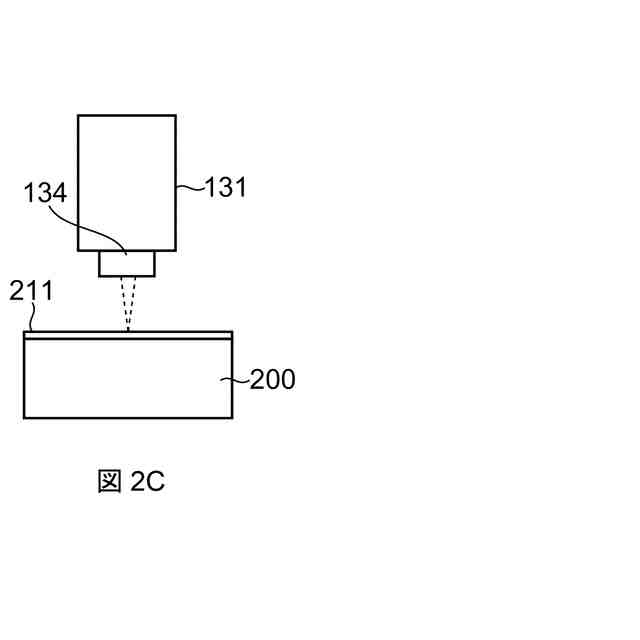
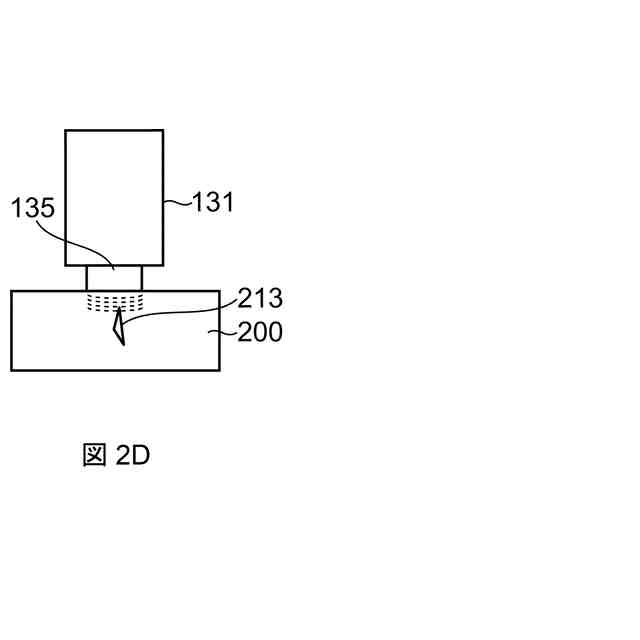
前記センサは、画像による欠陥検出センサ、反射スペクトルによる膜厚又は材質計測センサ、及び超音波又は渦電流による内部欠陥検出センサのいずれかである、
検査支援装置。
【請求項7】
請求項1に記載の検査支援装置であって、
前記表示制御部は、現実空間における前記ワーク上での前記検査位置と前記センサの前記位置との距離が許容距離範囲内に収まる方向を、前記検査位置に前記センサを近づける方向又は遠ざける方向として前記表示装置に表示させる、
検査支援装置。
【請求項8】
請求項1に記載の検査支援装置であって、
前記表示制御部は、現実空間における前記ワーク上での前記検査位置と前記センサの前記位置との差が前記許容位置ずれ範囲内に収まったときに、前記表示装置の表示態様を変化させる、
検査支援装置。
【請求項9】
請求項1に記載の検査支援装置であって、
前記表示制御部は、前記設計データ上の位置のうち、前記変換操作が行われた前記設計データと前記現実データとの差が所定値以上の位置を、前記設計データ上の前記検査位置に設定する、
検査支援装置。
【請求項10】
請求項1に記載の検査支援装置であって、
前記表示制御部は、前記設計データ上の位置のうち、前記センサによって異常が発見された位置を、前記設計データ上の前記検査位置に設定する、
検査支援装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、検査支援装置及び検査支援方法に関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
検査用のセンサを備えたロボットがワークに対して自動で検査を行う場合に、ワーク上の目標の位置にセンサを移動させる方法が提案されている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2021-189003号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、よりフレキシブルな検査を行うために、ロボットではなく作業者が、部品等のワークに欠陥があるかを、センサを把持して手作業で検査することがある。ワークの関心箇所をセンサで測定する際、作業者は、センサの位置及び方向を経験に基づき決めるため、適切な測定を効率的に行うことができない。
【0005】
特許文献1に記載された技術は、ワーク上の目標の位置にロボットを誘導する技術であり、人が手作業で検査をする場合に適用することはできない。
【0006】
本発明は、このような状況に鑑みてなされたものであり、作業者が効率的にワークの検査を行えるようにすることを目的とする。
【課題を解決するための手段】
【0007】
本願は、上記課題の少なくとも一部を解決する手段を複数含んでいるが、その例を挙げるならば、以下の通りである。
【0008】
上記課題を解決するため、本発明の一態様に係る検査支援装置は、現実空間内に置かれたワークの形状、位置、及び姿勢を示す現実データを取得する現実データ取得部と、前記ワークの設計上の形状を示す設計データ上の検査位置に対して、前記設計データを前記現実データに重ねる変換操作を施すことにより、現実空間における前記ワーク上での検査位置を算出する変換部と、前記ワークを検査するセンサの現実空間での位置を取得するセンサ位置取得部と、現実空間における前記ワーク上での前記検査位置と、前記センサの前記位置との差が許容位置ずれ範囲内に収まる方向を、前記センサを移動させる方向として表示装置に表示させる表示制御部とを有する。
【発明の効果】
【0009】
本発明によれば、作業者が効率的にワークの検査を行うことができる。
【0010】
上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
積算巻尺
1か月前
丸一株式会社
試験用継手
1か月前
個人
水準器
18日前
個人
電波反射強度向上方法
1か月前
個人
シート形状体温計
14日前
株式会社大真空
センサ
11日前
大和製衡株式会社
組合せ秤
1か月前
株式会社チノー
液浸プローブ
13日前
アズビル株式会社
圧力センサ
1か月前
日本電波工業株式会社
風速測定装置
11日前
三菱電機株式会社
レーダ装置
1か月前
キヤノン電子株式会社
サーボ加速度計
25日前
キヤノン電子株式会社
サーボ加速度計
25日前
株式会社東芝
センサ
25日前
株式会社東芝
センサ
18日前
トヨタ自動車株式会社
評価装置
1か月前
トヨタ自動車株式会社
解析装置
11日前
株式会社島津製作所
液体注入装置
25日前
株式会社豊田自動織機
車両
13日前
大和製衡株式会社
搬送装置
25日前
株式会社不二越
X線測定装置
1か月前
富士電機株式会社
エンコーダ
1か月前
能美防災株式会社
構造物劣化診断システム
25日前
トヨタ自動車株式会社
電池検査装置
20日前
ミツミ電機株式会社
入力装置
26日前
株式会社ピーエムティー
検査ゲージ
11日前
株式会社リコー
測距システム
26日前
ニチコン株式会社
コンデンサ
1か月前
個人
コンベックスルール用の計測補助用具
11日前
ミツミ電機株式会社
入力装置
25日前
株式会社山城建設
鉄筋用ロッド支持具
1か月前
個人
道または交差点を表現するアルゴリズム
27日前
キヤノン株式会社
検出装置
18日前
株式会社レゾナック
異物検出装置
25日前
TDK株式会社
磁気センサ
26日前
澁谷工業株式会社
清浄度監視装置
18日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ