TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024171247
公報種別
公開特許公報(A)
公開日
2024-12-11
出願番号
2023088219
出願日
2023-05-29
発明の名称
測距システム
出願人
株式会社リコー
代理人
個人
,
個人
主分類
G01S
17/10 20200101AFI20241204BHJP(測定;試験)
要約
【課題】量子もつれ状態にある光に基づく推論を実行可能な測距システムを提供する。
【解決手段】本開示の一態様に係る測距システムは、解析部を備え、前記解析部は、互いに量子もつれ状態にある第1光および第2光により取得された量子相関情報を入力し、前記量子相関情報に基づいて推論し、推論結果を出力する推論部を含む。
【選択図】図12
特許請求の範囲
【請求項1】
解析部を備え、
前記解析部は、互いに量子もつれ状態にある第1光および第2光により取得された量子相関情報を入力し、前記量子相関情報に基づいて推論し、推論結果を出力する推論部を含む、測距システム。
続きを表示(約 1,200 文字)
【請求項2】
前記量子相関情報は、異なる時間において前記第1光および前記第2光により取得された複数の空間相関画像である、請求項1に記載の測距システム。
【請求項3】
前記推論部は、前記推論結果として物体が検出されたフレームである物体フレームに関する情報を出力する、請求項1に記載の測距システム。
【請求項4】
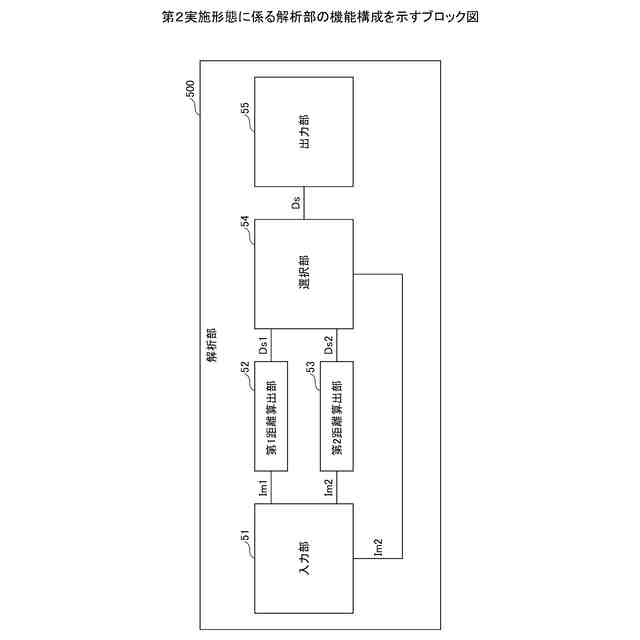
前記解析部は、受光画像が入力される演算部をさらに含み、
前記受光画像は、前記第1光および前記第2光の少なくとも一方が物体で反射されて生じる第1反射光を含む光を受光することにより得られ、
前記量子相関情報は、前記演算部により算出され、前記推論部へ出力される、請求項1に記載の測距システム。
【請求項5】
互いに量子もつれ状態にある第1光および第2光の少なくとも一方が物体で反射されて生じる第1反射光による飛行時間情報を含む第1情報を入力し、解析結果を出力する解析部を備え、
前記解析結果は、前記物体が検出されたフレームである物体フレームに関する情報、前記物体までの飛行時間情報及び前記物体までの距離情報の少なくとも1つを含む、測距システム。
【請求項6】
前記解析部は、前記第1情報から算出された量子相関情報に基づいて推論する推論部を含む、請求項5に記載の測距システム。
【請求項7】
前記解析部に、古典光である第3光が物体で反射されて生じた第2反射光による飛行時間情報を含む第2情報がさらに入力され、
前記解析部は、前記第1情報及び前記第2情報に基づいて前記解析結果を出力する、請求項5に記載の測距システム。
【請求項8】
投受光装置をさらに備え、
前記投受光装置は、
前記第1光と前記第2光とを射出する第1発光部と、
前記第1反射光を受光する受光部と、
前記第1発光部と前記受光部とを制御する制御部と、を備え、
前記解析部は、前記第1発光部および前記受光部の駆動条件を前記解析結果に基づいて算出し、前記制御部に駆動信号を出力する、請求項5に記載の測距システム。
【請求項9】
前記解析部は、前記駆動条件として、前記第1反射光を含む光を受光することにより得られる受光画像を撮像するフレーム数を算出する、請求項8に記載の測距システム。
【請求項10】
前記投受光装置は、古典光である第3光を射出する第2発光部をさらに備え、
前記受光部は前記第1反射光及び前記第3光が物体で反射されて生じた第2反射光を受光し、
前記解析部に、前記第2反射光による飛行時間情報を含む第2情報がさらに入力され、
前記解析部は、前記第1情報及び前記第2情報に基づいて前記解析結果を出力する、請求項8に記載の測距システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、測距システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、レーザ光源から出射されたパルス光を投光し、投光された光が物体により反射または散乱された光である戻り光を受光し、パルス光の出射から戻り光の受光までの時間に基づき、物体またの距離を測定するLiDAR(Light Detection and Ranging)が知られている。
【0003】
また、周波数量子もつれ光子の対に関して、第1光子を第1光路に沿って、第2光子を第2光路に沿って、それぞれ伝送し、第1光路に沿って伝送される光子を第1検出器により検出し、第2光路に沿って伝送される光子を第2検出器により検出する投受光技術が開示されている(例えば、特許文献1参照)。
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1では、量子もつれ状態にある光に基づき推論を行うことについて開示していない。
【0005】
本開示は、量子もつれ状態にある光に基づく推論を実行可能な測距システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係る測距システムは、解析部を備え、前記解析部は、互いに量子もつれ状態にある第1光および第2光により取得された量子相関情報を入力し、前記量子相関情報に基づいて推論し、推論結果を出力する推論部を含む。
【0007】
本開示の一態様に係る測距システムは、互いに量子もつれ状態にある第1光および第2光の少なくとも一方が物体で反射されて生じる第1反射光による飛行時間情報を含む第1情報を入力し、解析結果を出力する解析部を備え、前記解析結果は、前記物体が検出されたフレーム情報、前記物体までの飛行時間情報及び前記物体までの距離情報の少なくとも1つを含む。
【発明の効果】
【0008】
本開示によれば、量子もつれ状態にある光に基づく推論を実行可能な測距システムを提供することができる。
【図面の簡単な説明】
【0009】
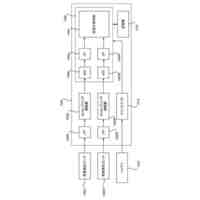
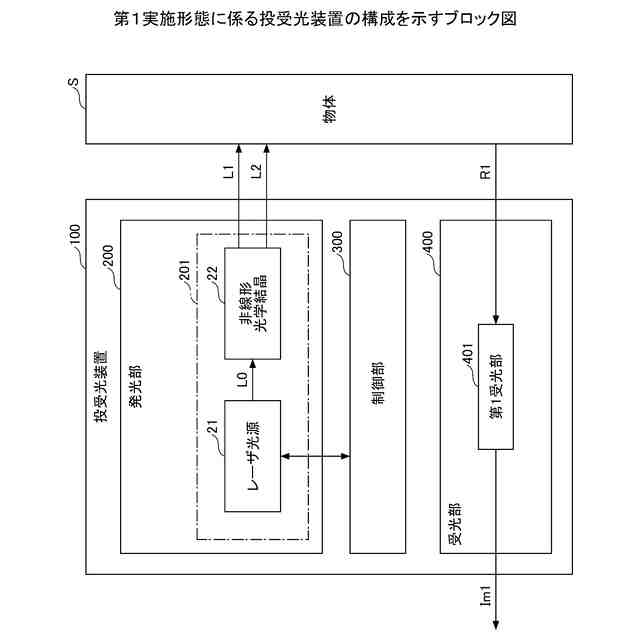
第1実施形態に係る投受光装置の構成を示すブロック図である。
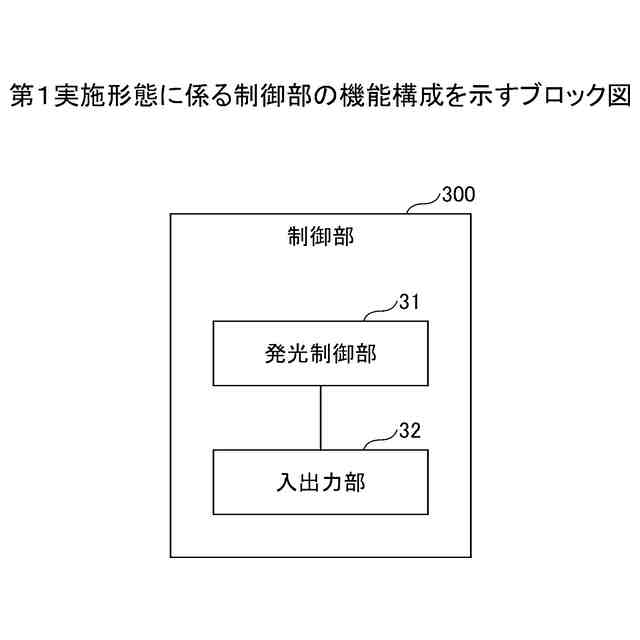
第1実施形態に係る制御部の機能構成を示すブロック図である。
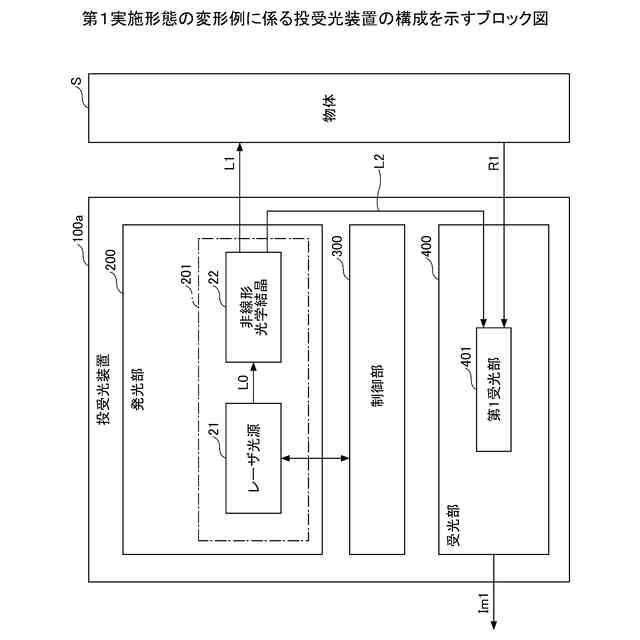
第1実施形態の変形例に係る投受光装置の構成を示すブロック図である。
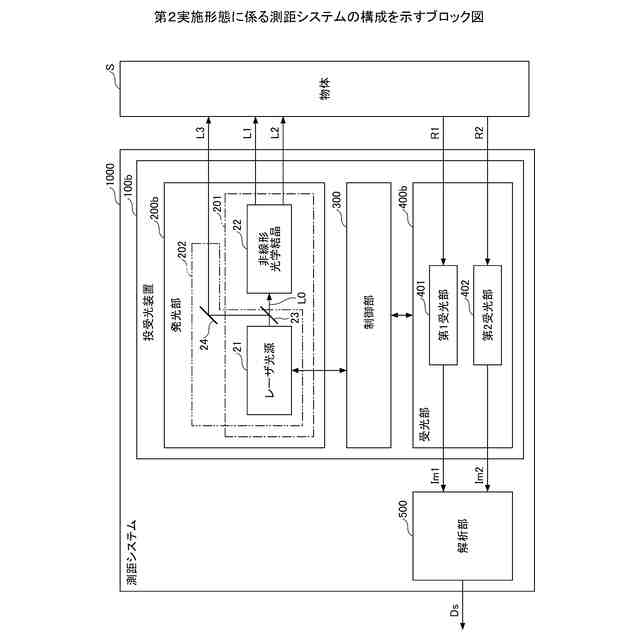
第2実施形態に係る測距システムの構成を示すブロック図である。
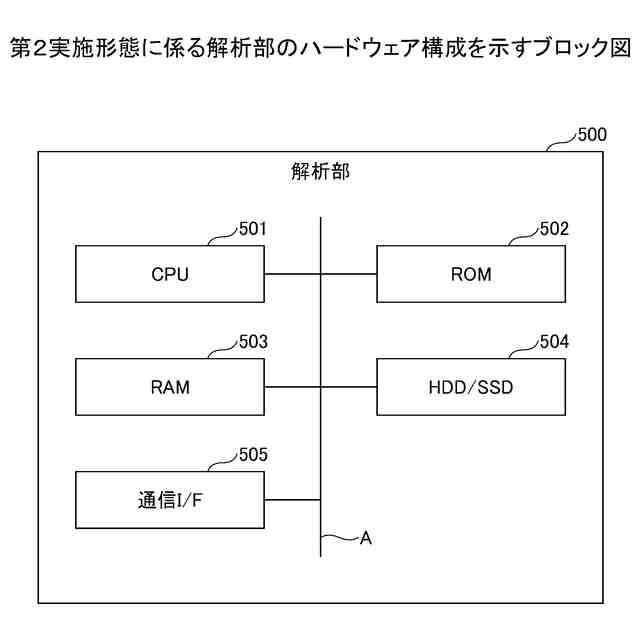
第2実施形態に係る解析部のハードウェア構成を示すブロック図である。
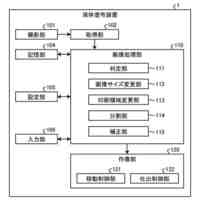
第2実施形態に係る解析部の機能構成を示すブロック図である。
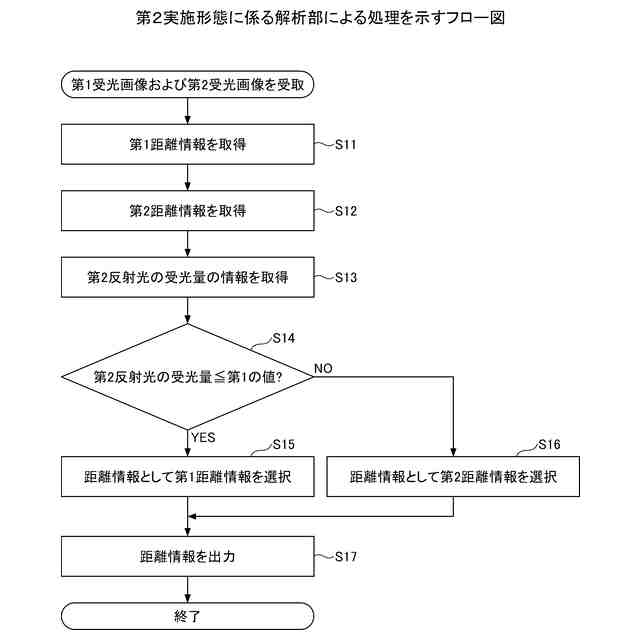
第2実施形態に係る解析部による処理を示すフロー図である。
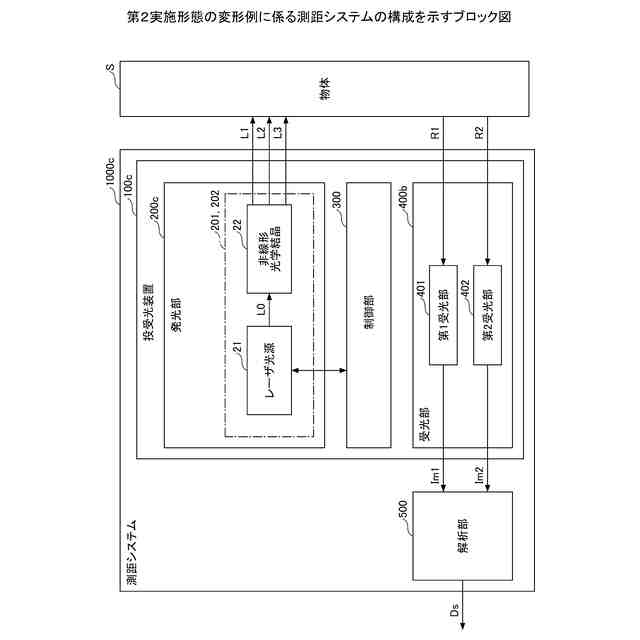
第2実施形態の変形例に係る測距システムの構成を示すブロック図である。
第3実施形態に係る測距システムの構成を示すブロック図である。
第3実施形態の変形例に係る測距システムの構成を示すブロック図である。
第4実施形態に係る測距システムの構成を示すブロック図である。
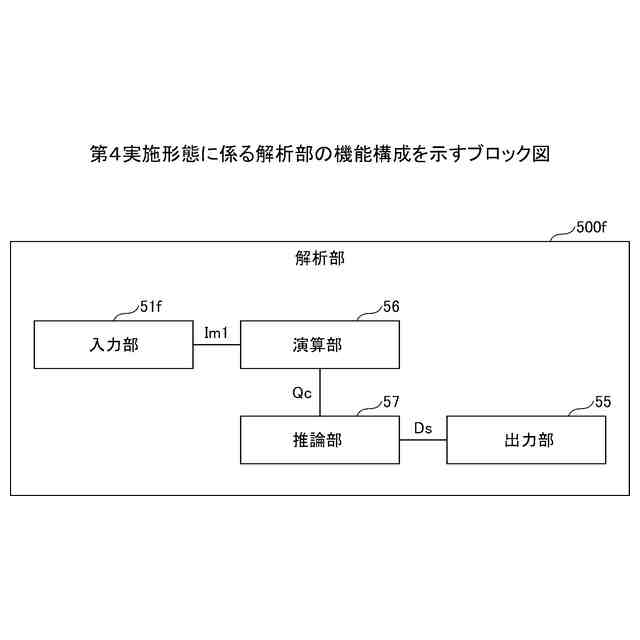
第4実施形態に係る解析部の機能構成を示すブロック図である。
第4実施形態に係る解析部による処理を示すフロー図である。
第5実施形態に係る測距システムの構成を示すブロック図である。
第5実施形態に係る解析部の機能構成を示すブロック図である。
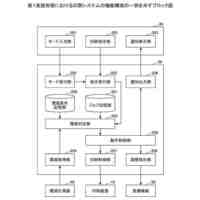
第5実施形態に係る制御部の機能構成を示すブロック図である。
第5実施形態に係る測距システムの動作を示すフロー図である。
第5実施形態の変形例に係る測距システムの動作を示すフロー図である。
第6実施形態に係る測距システムの構成を示すブロック図である。
第6実施形態に係る解析部の機能構成を示すブロック図である。
第6実施形態に係る測距システムの動作を示すフロー図である。
【発明を実施するための形態】
【0010】
以下、本開示の実施形態について添付の図面を参照しながら説明する。なお、本明細書及び図面において、実質的に同一の機能構成を備える構成要素については、同一の符号を付することにより重複した説明を適宜省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社リコー
画像形成装置
4日前
株式会社リコー
画像形成装置
3日前
株式会社リコー
定着装置及び画像形成装置
4日前
株式会社リコー
画像読取装置及び画像形成装置
3日前
株式会社リコー
シート搬送装置及び画像形成装置
3日前
株式会社リコー
画像処理装置、および画像処理方法
3日前
株式会社リコー
加熱装置、定着装置及び画像形成装置
2日前
株式会社リコー
情報処理装置、開発支援システムおよびプログラム
3日前
株式会社リコー
液体塗布装置、液体塗布システム、液体塗布方法およびプログラム
2日前
株式会社リコー
液体塗布装置、液体塗布システム、液体塗布方法およびプログラム
2日前
株式会社リコー
ファクシミリ装置、情報処理システム、情報処理方法及びプログラム
3日前
株式会社リコー
足踏み検知装置、情報処理システム、足踏み検知方法および動画再生方法
4日前
株式会社リコー
情報処理装置、情報処理システム、情報処理方法、印刷媒体、及びプログラム
4日前
株式会社リコー
情報処理装置、印刷システム、印刷方法及びプログラム
1日前
株式会社リコー
情報処理装置、情報処理方法、プログラム、情報処理システム
2日前
株式会社リコー
データ管理システム、端末装置、プログラム、データ入力方法
2日前
株式会社リコー
コミュニケーション支援システム、コミュニケーション支援装置、コミュニケーション支援方法、及びプログラム
4日前
日本精機株式会社
計器装置
9日前
株式会社東光高岳
計器
5日前
日本精機株式会社
液面検出装置
11日前
株式会社ミツトヨ
測定器
2日前
大和製衡株式会社
組合せ秤
11日前
大和製衡株式会社
組合せ秤
17日前
大和製衡株式会社
組合せ秤
11日前
大同特殊鋼株式会社
疵検出方法
2日前
ダイハツ工業株式会社
試験用治具
17日前
エグゼヴィータ株式会社
端末装置
3日前
日本特殊陶業株式会社
ガスセンサ
3日前
日本特殊陶業株式会社
ガスセンサ
12日前
日本特殊陶業株式会社
ガスセンサ
23日前
日本特殊陶業株式会社
ガスセンサ
12日前
日本特殊陶業株式会社
ガスセンサ
3日前
タカノ株式会社
試料分析装置
2日前
タカノ株式会社
試料分析装置
2日前
富士電機株式会社
エンコーダ
4日前
富士電機株式会社
エンコーダ
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ