TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024173277
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023091599
出願日
2023-06-02
発明の名称
自重補償装置
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
19/00 20060101AFI20241205BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】被支持体の着脱にかかわらず、安定したバランス状態を維持する。
【解決手段】自重補償装置は、支持点で第一アーム及び第二アームを回転可能に支持する架台と、第一アームに接続されて被支持体を支持可能な支持アームと、第一ウェイトの位置を調整可能な第一位置調整部と、第二ウェイトの位置を調整可能な第二位置調整部と、第一アームの回転を規制する第一ブレーキ部と、第二アームの回転を規制する第二ブレーキ部と、支持アームに生じるひずみを検出する第一ひずみ検出部と、第二アームに生じるひずみを検出する第二ひずみ検出部と、各検出部の検出結果に基づいて、第一ブレーキ部及び第二ブレーキ部や第一位置調整部及び第二位置調整部を駆動させる制御部と、を備える。
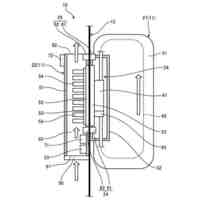
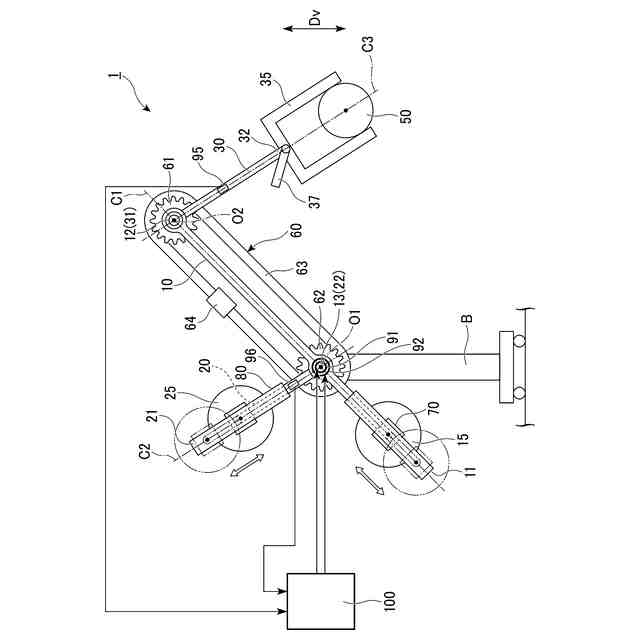
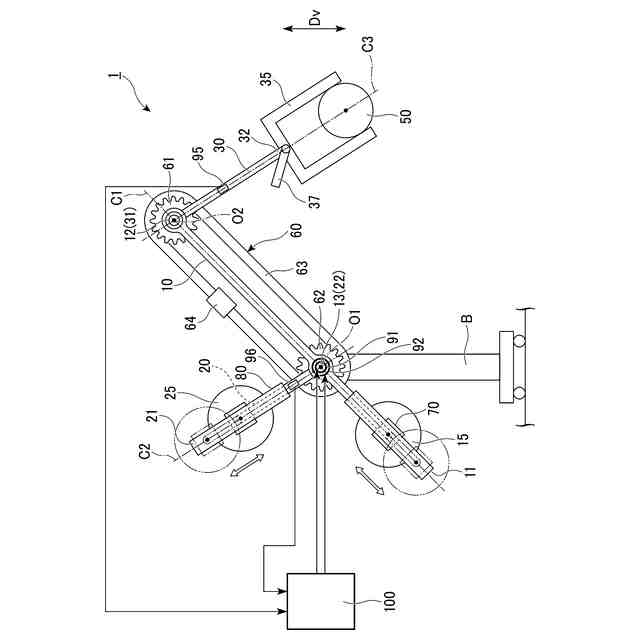
【選択図】図1
特許請求の範囲
【請求項1】
第一端部と、第二端部と、前記第一端部及び前記第二端部の間に配置された支持点とを有する第一アームと、
前記第一アームを前記支持点で回転可能に支持する架台と、
前記支持点から前記第一端部に向かように前記第一アームの延在方向に離間した位置で前記第一アームに支持された第一ウェイトと、
前記支持点で前記第一アームと独立して回転可能に支持され、前記支持点から前記第一アームの延在方向と交差する方向に延びる第二アームと、
前記支持点から前記第二アームの延在方向に離間した位置で前記第二アームに支持された第二ウェイトと、
前記第二端部で回転可能に支持され、前記第二アームが延びる方向と平行かつ反対方向に延びる支持アームと、
前記第一アームと接続されている端部と反対側の端部で前記支持アームに接続され、被支持体を着脱可能な把持部と、
前記支持アームと前記第二アームとが常時互いに平行となるように動作を連動させる連動機構と、
前記第二端部と前記支持点と前記第一端部とを結ぶ仮想直線上における前記支持点と前記第一ウェイトの距離を変更するように、前記支持点に対する前記第一ウェイトの位置を調整可能な第一位置調整部と、
前記支持点から前記第二アームの延在方向に延びる仮想直線上における前記支持点と前記第二ウェイトの距離を変更するように、前記支持点に対する前記第二ウェイトの位置を調整可能な第二位置調整部と、
前記支持点での前記架台に対する前記第一アームの回転を規制する第一ブレーキ部と、
前記支持点での前記架台に対する前記第二アームの回転を規制する第二ブレーキ部と、
前記支持アームに配置され、前記支持アームに生じるひずみを検出する第一ひずみ検出部と、
前記第二アームに配置され、前記第二アームに生じるひずみを検出する第二ひずみ検出部と、
前記第一ひずみ検出部及び前記第二ひずみ検出部の検出結果が入力されるとともに、入力された前記検出結果に基づいて、前記第一ブレーキ部及び前記第二ブレーキ部を駆動させるブレーキ信号と、前記第一位置調整部及び前記第二位置調整部を駆動させる位置調整信号を出力する制御部とを備え、
前記第二アームは、前記支持点を通る第一軸線を中心に前記第一アームに対して独立に回転可能とされ、
前記支持アームは、前記第一アーム上の前記第二端部を通り前記第一軸線に対して平行に延びる第二軸線を中心に、前記第一アームに対して回転可能とされ、
前記第二アームと前記支持アームとは、同期して動作するように連結されている自重補償装置。
続きを表示(約 360 文字)
【請求項2】
前記制御部は、前記第一ひずみ検出部及び前記第二ひずみ検出部の前記検出結果の比が予め定めた値を超えた時に、前記第一ブレーキ部及び前記第二ブレーキ部を駆動させるブレーキ信号を出力する請求項1に記載の自重補償装置。
【請求項3】
前記把持部を操作する操作部をさらに備え、
前記制御部は、前記操作部によって前記第一ブレーキ部及び前記第二ブレーキ部にブレーキ信号を出力する請求項1又は2に記載の自重補償装置。
【請求項4】
前記制御部は、前記把持部が前記被支持体を把持した状態で、前記第一ひずみ検出部及び前記第二ひずみ検出部の前記検出結果の比が予め定めた基準値に近づくように、前記第一位置調整部及び前記第二位置調整部に位置調整信号を出力する請求項1又は2に記載の自重補償装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、自重補償装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
近年、製造現場において、機械及びロボット等による自動化や作業者の少人数化が推進されているが、人手による作業を完全に無くすことは難しい。人手による作業のうちの1つとして、作業者が重い工具を扱う作業がある。このような作業は、作業の効率化を図るうえで、大きな障壁となっている。このような重い工具の自重を補償する機構として、自重補償装置がある(例えば、特許文献1参照)。
【0003】
特許文献1には、異なる被支持体の質量に応じて、重量補償力を調整可能な自重補償装置が記載されている。この自重補償装置は、第一アームと、支持点で第一アームと独立して回転可能に支持された第二アームと、被支持体を支持可能な支持アームと、支持アームと第二アームとを常時平行に維持する連動機構とを備えている。さらに、第一アームに支持された第一ウェイトと支持点との距離は第一位置調整部によって調整可能とされている。また、第二アームに支持された第二ウェイトと支持点との距離は第二位置調整部によって調整可能とされている。このような構成とされた自重補償装置を用いることで、被支持体の質量が変化しても、第一ウェイト及び第二ウェイトの位置を調整するだけで、被支持体の自重を補償するための重量補償力が調整可能とされている。
【先行技術文献】
【特許文献】
【0004】
特開2022-175659号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に開示された自重補償装置の場合、被支持体を着脱可能なハンドで把持する際に、把持する被支持体の質量に合わせてウェイトの位置を正確に調整して、第一アーム周りのバランスを調整する必要がある。さらに、ハンドで把持していた被支持体を離した場合のように、被支持体が急に支持アームから外れた場合には、第一アーム周りのバランスが崩れて、第一アームが急激に跳ね上がる可能性がある。そのため、被支持体の着脱にかかわらず、操作の安全性を維持することが望まれている。
【0006】
本開示は、上記課題を解決するためになされたものであって、被支持体の着脱にかかわらず、操作の安全性を維持することが可能な自重補償装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本開示に係る自重補償装置は、第一端部と、第二端部と、前記第一端部及び前記第二端部の間に配置された支持点とを有する第一アームと、前記第一アームを前記支持点で回転可能に支持する架台と、前記支持点から前記第一端部に向かうように前記第一アームの延在方向に離間した位置で前記第一アームに支持された第一ウェイトと、前記支持点で前記第一アームと独立して回転可能に支持され、前記支持点から前記第一アームの延在方向と交差する方向に延びる第二アームと、前記支持点から前記第二アームの延在方向に離間した位置で前記第二アームに支持された第二ウェイトと、前記第二端部で回転可能に支持され、前記第二アームが延びる方向と平行かつ反対方向に延びる支持アームと、前記第一アームと接続されている端部と反対側の端部で前記支持アームに接続され、被支持体を着脱可能な把持部と、前記支持アームと前記第二アームとが常時互いに平行となるように動作を連動させる連動機構と、前記第二端部と前記支持点と前記第一端部とを結ぶ仮想直線上における前記支持点と前記第一ウェイトの距離を変更するように、前記支持点に対する前記第一ウェイトの位置を調整可能な第一位置調整部と、前記支持点から前記第二アームの延在方向に延びる仮想直線上における前記支持点と前記第二ウェイトの距離を変更するように、前記支持点に対する前記第二ウェイトの位置を調整可能な第二位置調整部と、前記支持点での前記架台に対する前記第一アームの回転を規制する第一ブレーキ部と、前記支持点での前記架台に対する前記第二アームの回転を規制する第二ブレーキ部と、前記支持アームに配置され、前記支持アームに生じるひずみを検出する第一ひずみ検出部と、前記第二アームに配置され、前記第二アームに生じるひずみを検出する第二ひずみ検出部と、前記第一ひずみ検出部、及び前記第二ひずみ検出部の検出結果が入力されるとともに、入力された前記検出結果に基づいて、前記第一ブレーキ部及び前記第二ブレーキ部を駆動させるブレーキ信号と、前記第一位置調整部及び前記第二位置調整部を駆動させる位置調整信号を出力する制御部とを備え、前記第二アームは、前記支持点を通る第一軸線を中心に前記第一アームに対して独立に回転可能とされ、前記支持アームは、前記第一アーム上の前記第二端部を通り前記第一軸線に対して平行に延びる第二軸線を中心に、前記第一アームに対して回転可能とされ、前記第二アームと前記支持アームとは、同期して動作するように連結されている。
【発明の効果】
【0008】
本開示の自重補償装置によれば、被支持体の着脱にかかわらず、操作の安全性を維持できる。
【図面の簡単な説明】
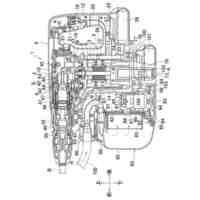
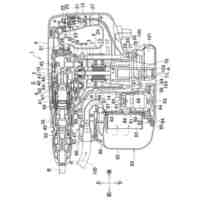
【0009】
第一実施形態に係る自重補償装置の構成を示す模式図である。
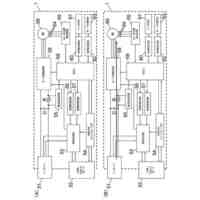
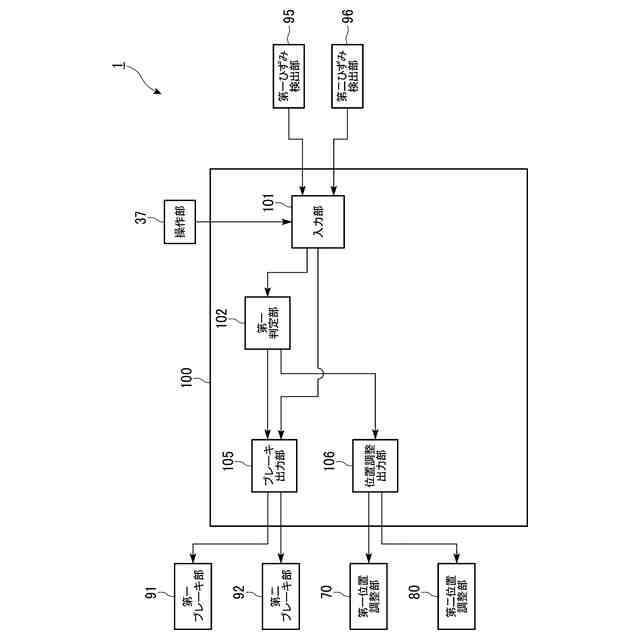
自重補償装置の制御部を示す機能ブロック図である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照して、本開示による自重補償装置1を実施するための形態を説明する。しかし、本開示はこの実施形態のみに限定されるものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱重工業株式会社
モータ制御装置
今日
三菱重工業株式会社
人体用熱交換装置
今日
三菱重工業株式会社
集塵システム及び集塵方法
今日
三菱重工業株式会社
濃度管理設備及び濃度管理方法
3日前
株式会社エビス
連結具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
打撃工具
1か月前
川崎重工業株式会社
ロボット
1か月前
株式会社マキタ
ハンマドリル
1か月前
川崎重工業株式会社
ロボット
1か月前
CKD株式会社
吸着型搬送装置
今日
長堀工業株式会社
締結装置
16日前
株式会社安川電機
ロボット
3日前
株式会社安川電機
ロボット
3日前
株式会社安川電機
ロボット
3日前
川崎重工業株式会社
塗装ロボット
7日前
株式会社アマダ
磁気吸着装置
6日前
株式会社不二越
ロボットの操作装置
1か月前
株式会社山下工業研究所
ラチェットレンチ
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
6日前
工機ホールディングス株式会社
作業機
6日前
株式会社ミマキエンジニアリング
印刷システム
15日前
株式会社ミマキエンジニアリング
印刷システム
15日前
株式会社ミマキエンジニアリング
印刷システム
15日前
株式会社マキタ
電動工具用集塵システム
29日前
株式会社マキタ
電動工具用集塵システム
29日前
工機ホールディングス株式会社
電気機器
1か月前
トヨタ自動車株式会社
経路決定システム及び方法
7日前
株式会社マキタ
打撃工具
7日前
理研軽金属工業株式会社
金具取付用の補助具
1か月前
株式会社マキタ
打撃工具
7日前
株式会社マキタ
打撃工具
7日前
株式会社マキタ
往復動工具
7日前
株式会社マキタ
電動作業機
6日前
株式会社マキタ
往復動工具
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ