TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024172490
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023090246
出願日
2023-05-31
発明の名称
可搬型端末
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20241205BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】 ロボットが干渉を回避しながら一定の動作を行うためのロボットの軌道を適切に生成する。
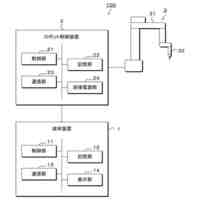
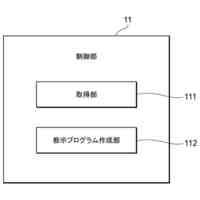
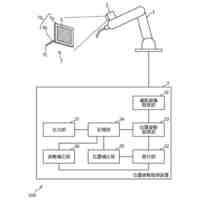
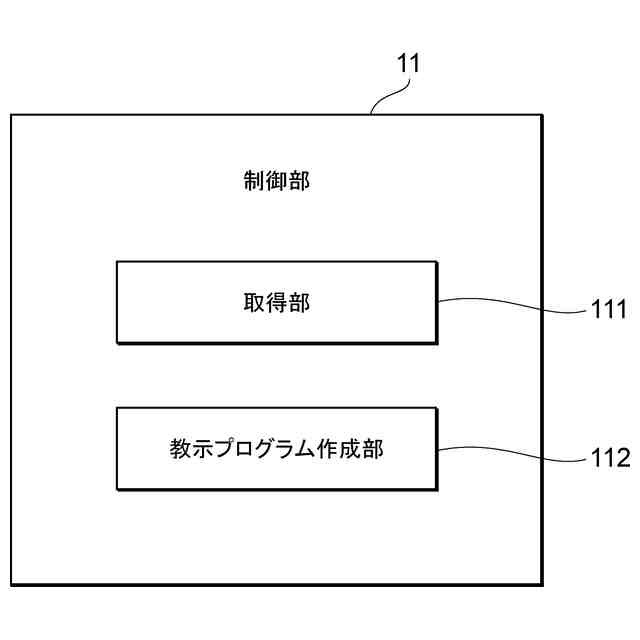
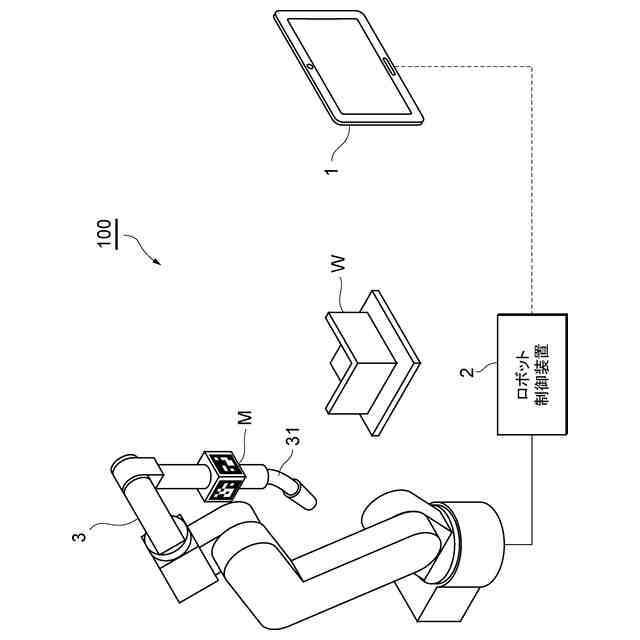
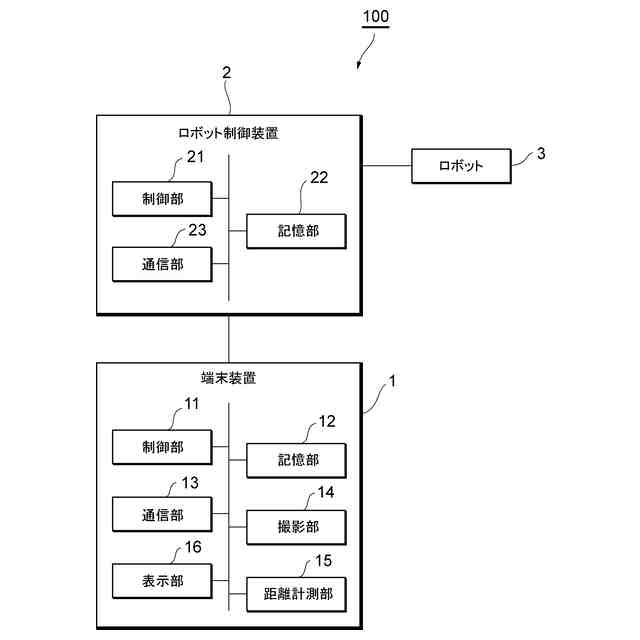
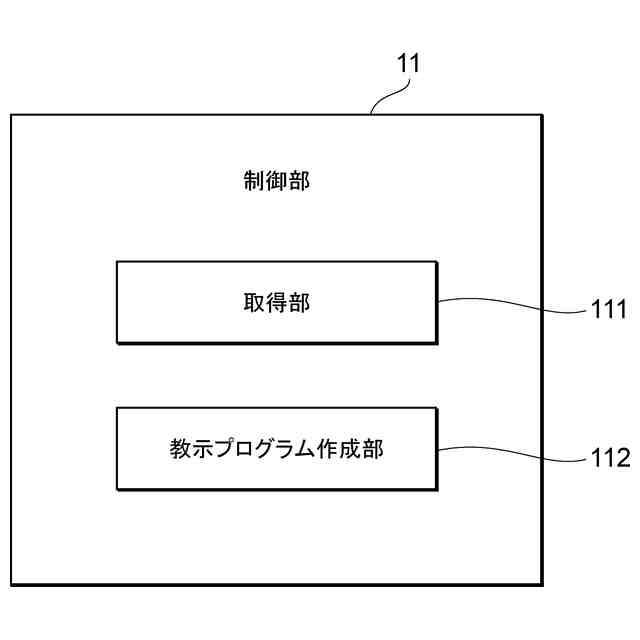
【解決手段】 教示プログラム生成装置は、ロボット及びその周辺の情報に基づいて、所定の動作をロボットに教示するための教示プログラムを生成する教示プログラム生成装置であって、ロボットが干渉を回避しながら所定の動作をするために用いられる情報を、ロボットの駆動を制御するロボット制御装置から取得する取得部111と、上述の情報を基に、ロボットが干渉を回避しながら所定の動作をするために移動する軌道を生成する教示プログラム作成部112とを備える。
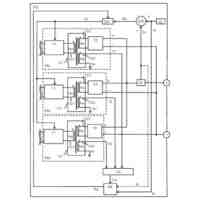
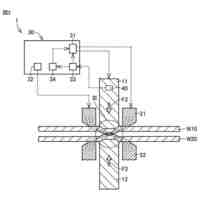
【選択図】 図3
特許請求の範囲
【請求項1】
ロボット及びその周辺の情報に基づいて、所定の動作をロボットに教示するための教示プログラムを生成する教示プログラム生成装置であって、
前記ロボットが干渉を回避しながら前記所定の動作をするために用いられる情報を、前記ロボットの駆動を制御するロボット制御装置から取得する取得部と、
前記情報を基に、前記ロボットが干渉を回避しながら前記所定の動作をするために移動する軌道を生成する教示プログラム作成部と、
を備える教示プログラム生成装置。
続きを表示(約 630 文字)
【請求項2】
請求項1に記載の教示プログラム生成装置であって、
前記情報は、前記ロボットに交換可能に取り付けられたツールの形状、大きさ、又は慣性のうち何れかの情報を含む、教示プログラム生成装置。
【請求項3】
請求項1に記載の教示プログラム生成装置であって、
前記情報は、前記ロボットが前記所定の動作を開始するときの前記ロボットの姿勢又は位置の情報を含む、教示プログラム生成装置。
【請求項4】
請求項1に記載の教示プログラム生成装置であって、
前記情報は、前記ロボットの種別を示す情報を含む、教示プログラム生成装置。
【請求項5】
請求項1に記載の教示プログラム生成装置であって、
前記情報は、前記ロボットの種別を示す情報と、前記ロボットに交換可能に取り付けられたツールの種別を示す情報とを含み、
前記教示プログラム生成装置は、
複数種類のロボットのそれぞれの3次元モデルと、前記ロボットに交換可能に取り付け可能な複数種類のツールのそれぞれの3次元モデルとを記憶する記憶部と、
前記ロボットの種別に対応する前記ロボットの3次元モデルと、前記ツールの種別に対応する前記ツールの3次元モデルとを前記記憶部から読み出し、読み出した前記ロボットの3次元モデルと前記ツールの3次元モデルとを表示する表示部と、
を備える、教示プログラム生成装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、教示プログラム生成装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
ファクトリーオートメーションの分野では、ロボットに実行させるための一定の動作内容を記述するプログラムを予め作成する処理が行われており、このような処理は、ティーチングと呼ばれている。ロボットはティーチングにより予め作成されたプログラムに従って動作し、一定の動作を繰り返し実行する。このようなティーチングとして、例えば、特許文献1には、ロボットが障害物を回避しながら動作するための軌道を生成する方法が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-65939号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、従来のティーチングでは、ツールが取り付けられたロボットが干渉を回避しながら一定の動作を行うためのロボットの軌道を生成するための情報として、ロボットに取り付けられているツールの情報(例えば、ツールの形状、大きさ、又は慣性のうち何れかの情報)が用いられていないため、ロボットに取り付けられるツールが交換された場合に、ツール毎に異なるツールの形状、大きさ、又は慣性などを考慮に入れて、ロボットが干渉を回避しながら一定の動作を行うためのロボットの軌道を生成することができなかった。
【0005】
また、従来のティーチングでは、ロボットが干渉を回避しながら一定の動作を行うためのロボットの軌道を生成するための情報として、ロボットが所定の動作を開始するときのロボットの初期姿勢又は初期位置の正確な情報が用いられていないため、ロボットの初期姿勢又は初期位置の正確な情報を考慮に入れて、ロボットが干渉を回避しながら一定の動作を行うためのロボットの軌道を生成することができなかった。
【0006】
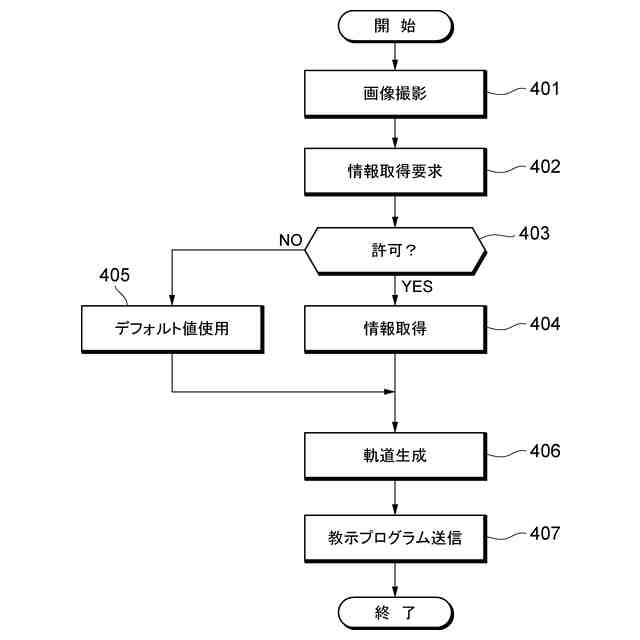
また、ロボット及びその周辺の環境に存在する物体の画像を撮影するとともに、ロボット及びその周辺の環境に存在する物体までの距離を計測し、撮影された画像及び計測された距離に基づいて、ロボット及びその周辺の環境に存在する物体の相対的な位置関係を計算し、その計算結果に基づいて、ロボットの動作を教示するための教示プログラムを作成する従来の方法では、作業者が初期設定値(例えば、ロボットが動作を開始するときの初期位置又は初期姿勢、或いはロボットに取り付けられているツールの種別など)を入力する必要があった。このため、所定の動作をロボットに教示する教示プログラムの作成を開始する時点で、ロボットの位置又は姿勢が変化していたり、或いはツールが交換されたりしている場合には、作業者が入力する初期設定値は、正確な情報とは限らないという課題があった。
【0007】
そこで、本発明は、このような課題を解決し、ロボットが干渉を回避しながら一定の動作を行うためのロボットの軌道を適切に生成することを課題とする。
【課題を解決するための手段】
【0008】
上述の課題を解決するため、本発明に関わる教示プログラム生成装置は、ロボット及びその周辺の情報に基づいて、所定の動作をロボットに教示するための教示プログラムを生成する教示プログラム生成装置であって、ロボットが干渉を回避しながら所定の動作をするために用いられる情報を、ロボットの駆動を制御するロボット制御装置から取得する取得部と、上述の情報を基に、ロボットが干渉を回避しながら所定の動作をするために移動する軌道を生成する教示プログラム作成部とを備える。ロボットが干渉を回避しながら所定の動作をするために用いられる情報をロボット制御装置から取得することにより、ロボットが干渉を回避しながら一定の動作を行うためのロボットの軌道を適切に生成することができる。なお、ロボット及びその周辺の情報は、例えば、ロボット及びその周辺を撮影した画像でもよく、或いはロボット及びその周辺の点群データでもよい。
【0009】
ここで、ロボット制御装置から取得する情報は、例えば、ロボットに交換可能に取り付けられたツールの形状、大きさ、又は慣性のうち何れかの情報を含むものでもよい。これにより、ロボットに取り付けられるツールが交換された場合に、ツール毎に異なるツールの形状、大きさ、又は慣性などを考慮に入れて、ロボットが干渉を回避しながら一定の動作を行うためのロボットの軌道を生成することができる。
【0010】
また、ロボット制御装置から取得する情報は、例えば、ロボットが所定の動作を開始するときのロボットの姿勢又は位置の情報を含むものでもよい。これにより、ロボットが所定の動作を開始するときのロボットの初期姿勢又は初期位置の正確な情報を考慮に入れて、ロボットが干渉を回避しながら一定の動作を行うためのロボットの軌道を生成することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
移動体
7日前
株式会社ダイヘン
開閉器
1か月前
株式会社ダイヘン
移動体
7日前
株式会社ダイヘン
端末装置
7日前
株式会社ダイヘン
搬送装置
今日
株式会社ダイヘン
電源装置
21日前
株式会社ダイヘン
電源装置
21日前
株式会社ダイヘン
充電装置
今日
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
制御装置
1か月前
株式会社ダイヘン
電源装置
22日前
株式会社ダイヘン
可搬型端末
今日
株式会社ダイヘン
充電システム
1か月前
株式会社ダイヘン
充電システム
今日
株式会社ダイヘン
干渉判定装置
今日
株式会社ダイヘン
給電システム
22日前
株式会社ダイヘン
熱加工システム
1か月前
株式会社ダイヘン
ショックセンサ
1か月前
株式会社ダイヘン
レーザ加工装置
今日
株式会社ダイヘン
レーザ加工装置
今日
株式会社ダイヘン
アーク溶接制御方法
22日前
株式会社ダイヘン
パルスアーク溶接制御方法
22日前
株式会社ダイヘン
パルスアーク溶接制御方法
22日前
株式会社ダイヘン
2重シールドティグ溶接方法
8日前
株式会社ダイヘン
2重シールドティグ溶接方法
14日前
株式会社ダイヘン
交流消耗電極アーク溶接制御方法
14日前
株式会社ダイヘン
位置姿勢取得装置、及びプローブ
21日前
株式会社ダイヘン
交流消耗電極アーク溶接制御方法
8日前
株式会社ダイヘン
交流消耗電極アーク溶接制御方法
8日前
株式会社ダイヘン
接合監視システムおよび測定方法
1日前
株式会社ダイヘン
溶接検査装置および溶接システム
1か月前
株式会社ダイヘン
溶接ワイヤ送給装置および溶接装置
20日前
株式会社ダイヘン
制御回路、および、三相力率改善装置
14日前
国立大学法人大阪大学
固相接合装置および固相接合方法
1日前
国立大学法人大阪大学
固相接合装置および不純物の除去方法
1日前
国立大学法人大阪大学
抵抗スポット接合方法及び抵抗スポット接合装置
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ