TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024172311
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023089940
出願日
2023-05-31
発明の名称
干渉判定装置
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
19/06 20060101AFI20241205BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットが他の物体と干渉するかどうかを判定する際に、判定に用いる点群データを効率よく削減することができる干渉判定装置を提供する。
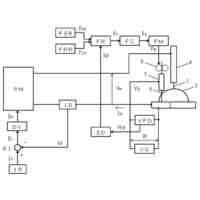
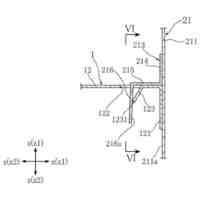
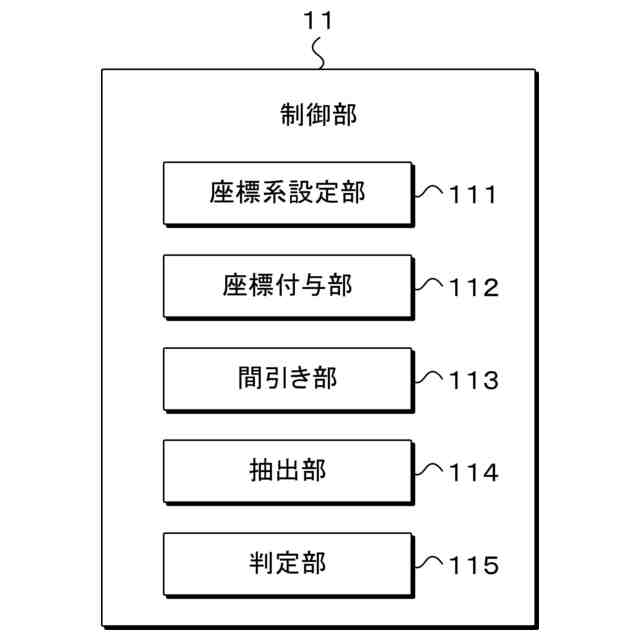
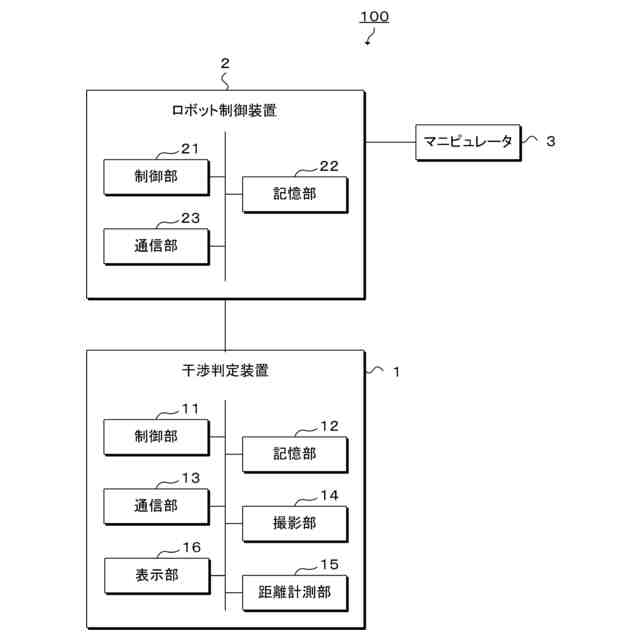
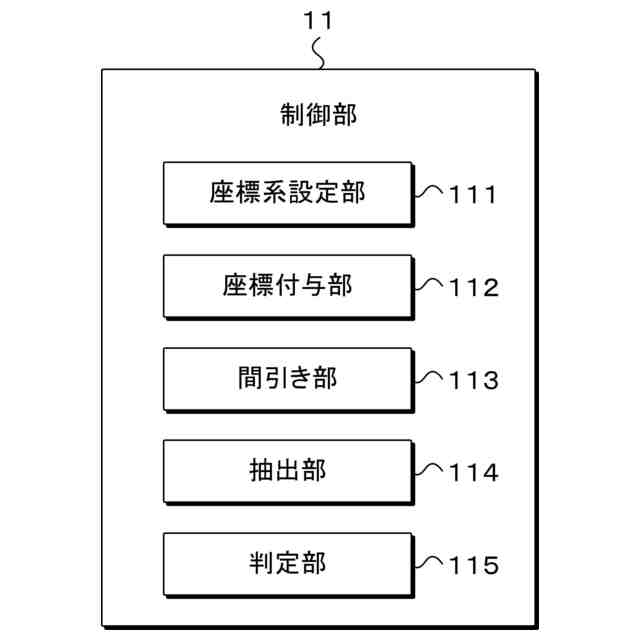
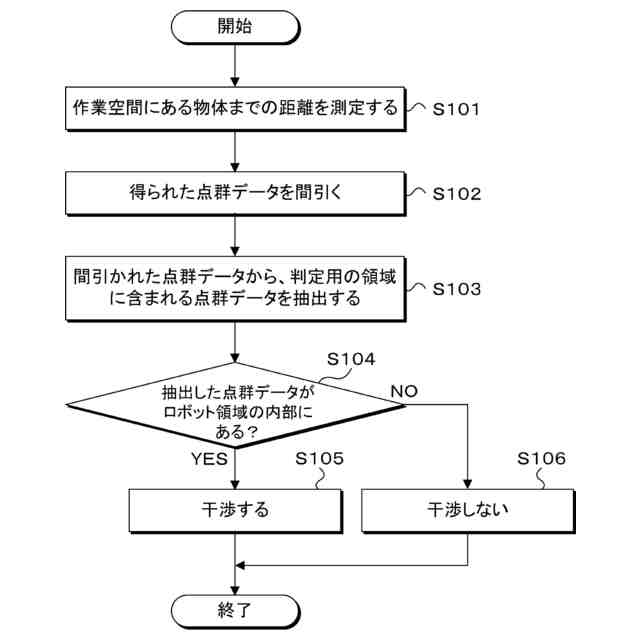
【解決手段】干渉判定装置は、ロボットの作業空間に含まれる物体までの距離を測定する距離計測部と、距離計測部により得られる点群データの範囲及び点数に基づいて、距離計測部により得られる点群データを間引く間引き部113と、間引き部113により間引かれた後の点群データから、作業空間に配置されるロボットのモデルに対応するロボット領域を包含する判定用の領域に含まれる点群データを抽出する抽出部114と、抽出部114により抽出された点群データが、ロボット領域の内部にある場合に、ロボットが物体と干渉すると判定する判定部115と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
ロボットの作業空間に含まれる物体までの距離を測定する距離計測部と、
前記距離計測部により得られる点群データの範囲及び点数に基づいて、前記距離計測部により得られる点群データを間引く間引き部と、
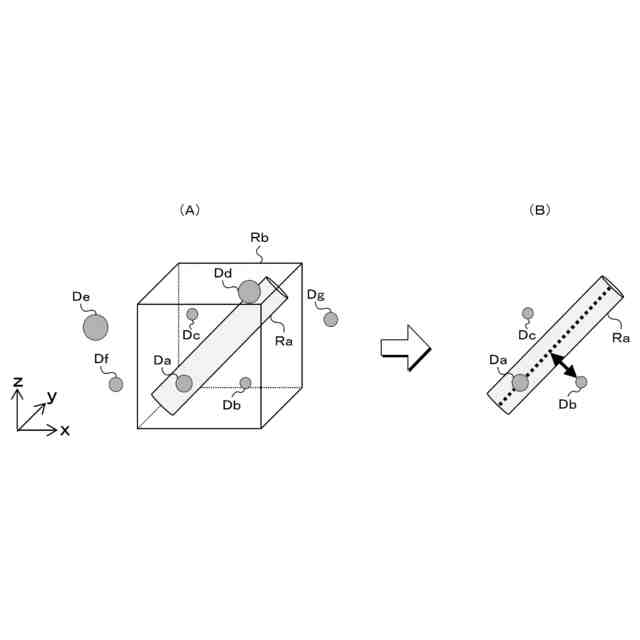
前記間引き部により間引かれた後の点群データから、前記作業空間に配置される前記ロボットのモデルに対応するロボット領域を包含する判定用の領域に含まれる点群データを抽出する抽出部と、
前記抽出部により抽出された点群データが、前記ロボット領域の内部にある場合に、前記ロボットが前記物体と干渉すると判定する判定部と、
を備える干渉判定装置。
続きを表示(約 860 文字)
【請求項2】
ロボットの作業空間に含まれる物体までの距離を測定する距離計測部と、
前記距離計測部により得られる点群データの範囲及び点数に基づいて、前記距離計測部により得られる点群データを間引く間引き部と、
前記間引き部により間引かれた後の点群データが、前記作業空間に配置される前記ロボットのモデルに対応するロボット領域の内部にある場合に、前記ロボットが前記物体と干渉すると判定する判定部と、
を備える干渉判定装置。
【請求項3】
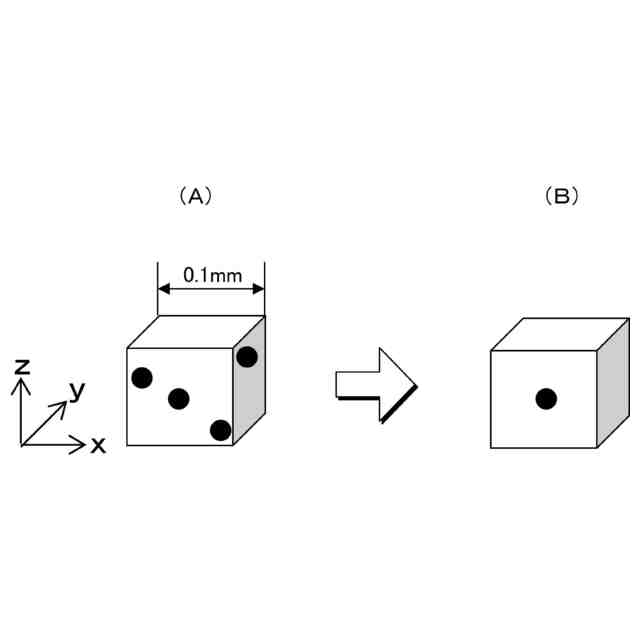
前記間引き部は、前記距離計測部により得られる点群データの範囲及び点数に基づいて点群データを間引く際に、間引きの対象となる点群データのグループを画定するための空間のサイズを算定し、前記空間により画定されるグループごとに点群データを間引く、
請求項1又は2記載の干渉判定装置。
【請求項4】
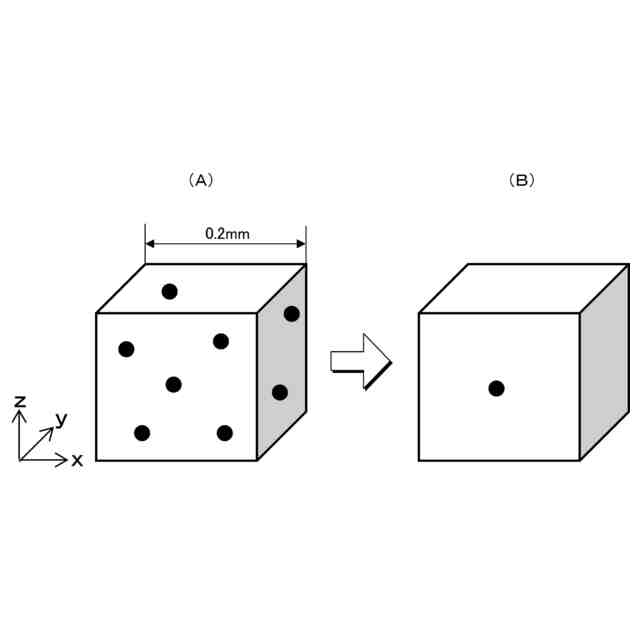
前記間引き部は、間引いた後に残った点群データ全体の点数が、目標とする点数よりも多い場合に、前記空間のサイズを大きくし、大きくした後の前記空間によって画定されるグループごとに、点群データをさらに間引く、
請求項3記載の干渉判定装置。
【請求項5】
ロボットの作業空間に含まれる物体までの距離を測定する距離計測部と、
前記距離計測部により得られる点群データから、前記作業空間に配置される前記ロボットのモデルに対応するロボット領域を包含する判定用の領域に含まれる点群データを抽出する抽出部と、
前記抽出部により抽出された点群データが、前記ロボット領域の内部にある場合に、前記ロボットが前記物体と干渉すると判定する判定部と、
を備える干渉判定装置。
【請求項6】
前記判定用の領域は、前記ロボットのリンクごとに設けられ、
前記判定部は、前記ロボットが前記物体と干渉するかどうかを、前記ロボットのリンクごとに判定する、
請求項1又は5記載の干渉判定装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、干渉判定装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、工場などで作業を行うロボットの動作計画において、ロボットのアームなどが干渉しないようにチェックすることが行われている。干渉の有無をチェックする手法として、例えば、ロボットなどの物体に対応する3次元座標の点群データを取得し、取得した点群データを利用してチェックする手法が用いられている。しかしながら、全ての点群データを用いて処理を行うと負荷が増大するため、処理に用いる点群データを効率よく削減することが望まれる。
【0003】
処理負荷を低減するものとして、例えば、下記特許文献1に、ロボットの複数の構成要素間の干渉をチェックする干渉チェック装置が開示されている。この干渉チェック装置は、ロボットを頭、胸、腰、右上腕、右肘、右前腕などの部位に分類し、ロボットの姿勢に応じて、干渉の可能性がある部位を各部位の組み合わせごとに特定するための干渉マトリックスを記憶させ、この干渉マトリックスを用いてロボットの干渉をチェックしている。
【0004】
この干渉チェック装置は、コントローラの動作指令値から想定されるロボットの姿勢に基づいて、干渉マトリックスを参照し、干渉の可能性がある部位の組み合わせが存在する場合に、それらの部位に対応する3次元座標同士が重なり合っているか否かを判定することで、干渉を検出する。
【先行技術文献】
【特許文献】
【0005】
特開2011-131303号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1の干渉チェック装置は、ロボットの部位同士の干渉をチェックするものであり、ロボットが他の物体と干渉するかどうかをチェックするものではない。
【0007】
そこで、本発明は、ロボットが他の物体と干渉するかどうかを判定する際に、判定に用いる点群データを効率よく削減することができる干渉判定装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の一態様に係る干渉判定装置は、ロボットの作業空間に含まれる物体までの距離を測定する距離計測部と、距離計測部により得られる点群データの範囲及び点数に基づいて、距離計測部により得られる点群データを間引く間引き部と、間引き部により間引かれた後の点群データから、作業空間に配置されるロボットのモデルに対応するロボット領域を包含する判定用の領域に含まれる点群データを抽出する抽出部と、抽出部により抽出された点群データが、ロボット領域の内部にある場合に、ロボットが物体と干渉すると判定する判定部と、を備える。
【0009】
この態様によれば、ロボットの作業空間に含まれる物体に対応する点群データを取得し、取得した点群データを点群データの範囲及び点数に基づいて間引き、間引いた後の点群データから、ロボットのモデルに対応するロボット領域を包含する判定用の領域に含まれる点群データを抽出し、抽出した点群データがロボット領域の内部にある場合に、ロボットが物体と干渉すると判定することができる。
【0010】
これにより、物体に対応する点群データを間引き、その間引いた後の点群データから、干渉の判定に必要な点群データを抽出し、その抽出した点群データを用いてロボットが他の物体と干渉するかどうかを判定することが可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
電気機器
23日前
株式会社ダイヘン
溶接装置
9日前
株式会社ダイヘン
電力システム
4日前
株式会社ダイヘン
直流電源回路
16日前
株式会社ダイヘン
インバータ装置
16日前
株式会社ダイヘン
蓄電池システム
23日前
株式会社ダイヘン
蓄電池システム
9日前
株式会社ダイヘン
絶縁型コンバータ
16日前
株式会社ダイヘン
絶縁型コンバータ
16日前
株式会社ダイヘン
溶接装置及び溶接方法
16日前
株式会社ダイヘン
圧接装置及び圧接方法
10日前
株式会社ダイヘン
トランス用のコイル基板
16日前
株式会社ダイヘン
非消耗電極アーク溶接方法
10日前
株式会社ダイヘン
2重シールドティグ溶接方法
10日前
株式会社ダイヘン
複合溶接装置及び複合溶接方法
10日前
株式会社ダイヘン
分離装置、分離方法、溶接切断装置
18日前
株式会社ダイヘン
電源装置におけるケースの取付構造
9日前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
12日前
株式会社ダイヘン
処理装置、プログラム、及び処理方法
17日前
株式会社ダイヘン
多電極サブマージアーク溶接システム
10日前
株式会社ダイヘン
固相接合装置、制御装置、および制御方法
12日前
株式会社ダイヘン
搬送ロボットの教示システム、および搬送ロボットの教示方法
16日前
OMC株式会社
ロボット
9日前
川崎重工業株式会社
ハンド
1か月前
株式会社クレスコ
補助吸着具
2日前
株式会社不二越
ロボット
1か月前
個人
けがき用治具
1か月前
個人
深孔スリーブ駆動ロッド構造
22日前
株式会社不二越
ロボット操作装置
29日前
株式会社エビス
腰ベルト用連結具
9日前
川崎重工業株式会社
ロボット
1か月前
個人
バール
22日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ