TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024168551
公報種別
公開特許公報(A)
公開日
2024-12-05
出願番号
2023085334
出願日
2023-05-24
発明の名称
端末装置
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20241128BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業者の操作に応じて産業用ロボットがどのような姿勢に変化するのかを視認可能な端末装置を提供する。
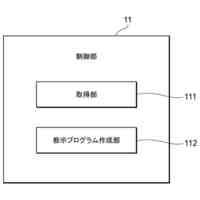
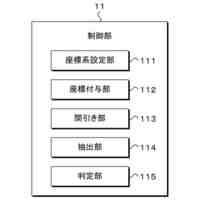
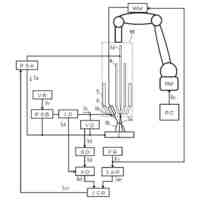
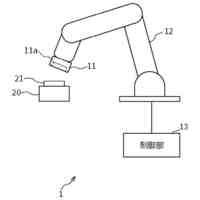
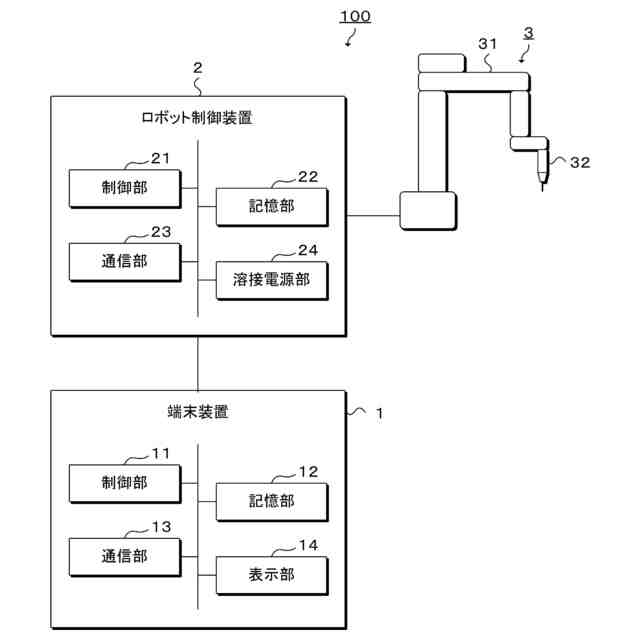
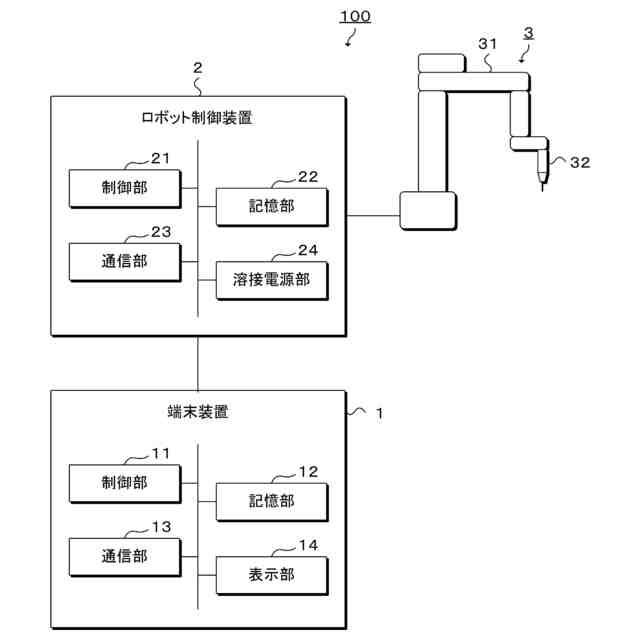
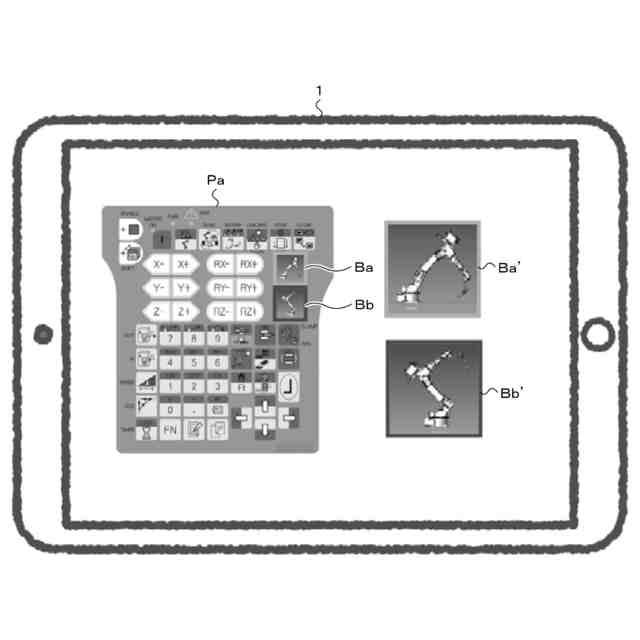
【解決手段】端末装置1は、産業用ロボットの動作を教示可能な端末装置1であって、産業用ロボットを手動で操作する際に、産業用ロボットの動作を前進させるための第1ボタン及び産業用ロボットの動作を後退させるための第2ボタンを含む操作パネルを表示させる制御部11を、備え、制御部11は、第1ボタン又は第2ボタンが押下された場合に、押下されたことにより動作する産業用ロボットの姿勢を所定の表示領域に表示させる。
【選択図】図1
特許請求の範囲
【請求項1】
産業用ロボットの動作を教示可能な端末装置であって、
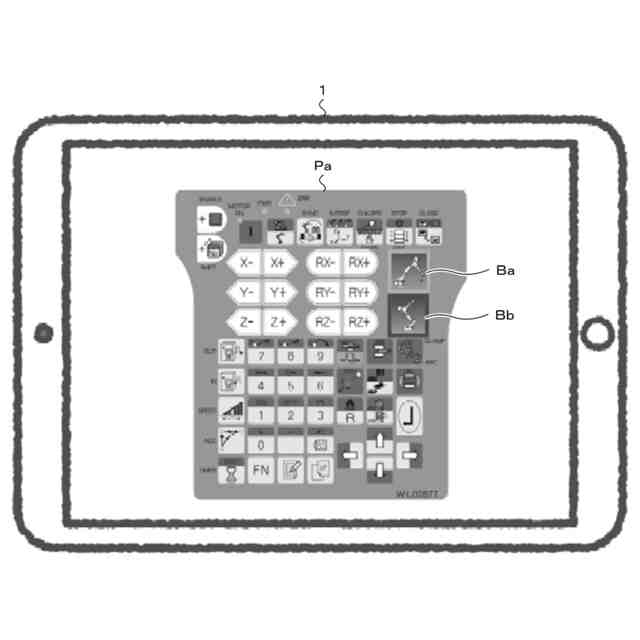
前記産業用ロボットを手動で操作する際に、前記産業用ロボットの動作を前進させるための第1ボタン及び前記産業用ロボットの動作を後退させるための第2ボタンを含む操作パネルを表示させる制御部を、備え、
前記制御部は、前記第1ボタン又は前記第2ボタンが押下された場合に、押下されたことにより動作する前記産業用ロボットの姿勢を所定の表示領域に表示させる、
端末装置。
続きを表示(約 390 文字)
【請求項2】
前記所定の表示領域は、押下された前記第1ボタン又は前記第2ボタンの表示領域である、
請求項1記載の端末装置。
【請求項3】
前記制御部は、前記第1ボタン又は前記第2ボタンが押下された場合に、前記所定の表示領域を拡大し、拡大した表示領域に前記産業用ロボットの姿勢を表示させる、
請求項1記載の端末装置。
【請求項4】
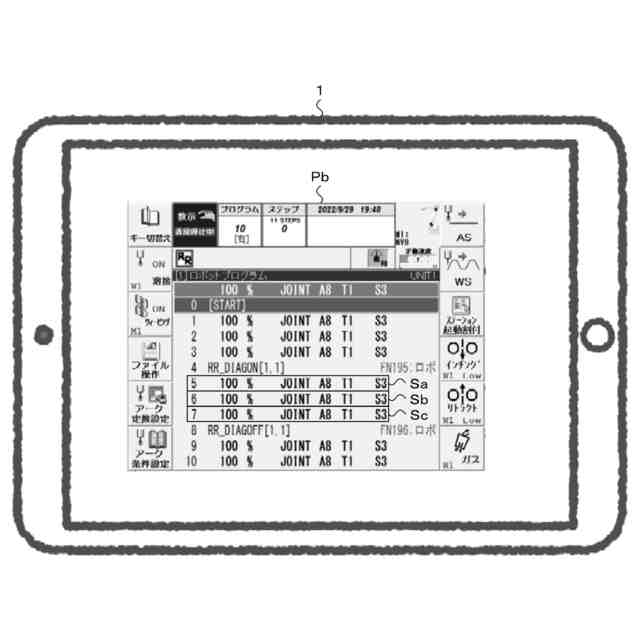
前記制御部は、前記第1ボタン又は前記第2ボタンが押下されることにより動作する前記産業用ロボットの動作の進行状況を識別可能に表示させる、
請求項1記載の端末装置。
【請求項5】
前記制御部は、前記所定の表示領域の背景を段階的に変更する、又は前記産業用ロボットの動きをアニメーション表示させることにより、前記進行状況を識別可能に表示させる、
請求項4記載の端末装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、産業用ロボットの動作を教示可能な端末装置に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
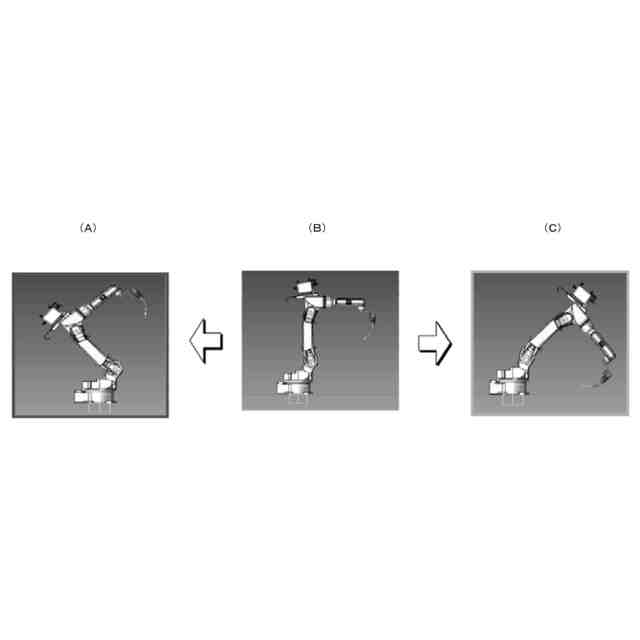
従来から、ロボットの動作を教示する際に、教示用の操作盤を有するティーチペンダントが用いられている。下記特許文献1には、ロボットを動作させるロボットプログラムに基づいて生成された教示点や経路を含む表示データ及びロボットの形状データをグラフィック表示させるロボット教示操作盤が開示されている。このロボット教示操作盤は、ロボットを手動で操作するためのジョグボタンを作業者が押下すると、ロボットが実際に動作する前に、押下されたジョグボタンに対応するロボットの動作方向を表す矢印を、ロボットを表示しているグラフィック表示画面上に表示させる。
【先行技術文献】
【特許文献】
【0003】
特許第4014662号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、ロボットの動作を教示する際に、ロボットの動作方向を表す矢印を表示するだけでは、実際にロボットがどのような姿勢に変化するのかを作業者が直感的に理解することは難しい。
【0005】
そこで、本発明は、作業者の操作に応じて産業用ロボットがどのような姿勢に変化するのかを視認可能な端末装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係る端末装置は、産業用ロボットの動作を教示可能な端末装置であって、産業用ロボットを手動で操作する際に、産業用ロボットの動作を前進させるための第1ボタン及び産業用ロボットの動作を後退させるための第2ボタンを含む操作パネルを表示させる制御部を、備え、制御部は、第1ボタン又は第2ボタンが押下された場合に、押下されたことにより動作する産業用ロボットの姿勢を所定の表示領域に表示させる。
【0007】
この態様によれば、産業用ロボットの動作を前進させるための第1ボタン又は産業用ロボットの動作を後退させるための第2ボタンが押下されたときに、その押下により動作する産業用ロボットの姿勢を所定の表示領域に表示させることができる。それゆえ、作業者は、ボタンを操作したときに、その操作により変化する産業用ロボットの姿勢を容易に把握することが可能となる。
【0008】
上記態様において、所定の表示領域は、押下された第1ボタン又は第2ボタンの表示領域であってもよい。
【0009】
この態様によれば、作業者は、ボタンを操作したときに、操作したボタンを目視することで、操作により変化する産業用ロボットの姿勢を把握することが可能となる。
【0010】
上記態様において、制御部は、第1ボタン又は第2ボタンが押下された場合に、所定の表示領域を拡大し、拡大した表示領域に産業用ロボットの姿勢を表示させてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
碍子
1か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社ダイヘン
溶接トーチ
1か月前
株式会社ダイヘン
可搬型端末
2か月前
株式会社ダイヘン
溶接トーチ
1か月前
株式会社ダイヘン
干渉判定装置
2か月前
株式会社ダイヘン
溶接検査方法
2か月前
株式会社ダイヘン
電力システム
1か月前
株式会社ダイヘン
電力システム
1か月前
株式会社ダイヘン
リユース方法
11日前
株式会社ダイヘン
電力システム
11日前
株式会社ダイヘン
電圧調整装置
26日前
株式会社ダイヘン
パルス電源装置
26日前
株式会社ダイヘン
レーザ加工装置
2か月前
株式会社ダイヘン
絶縁紙巻き機構
1か月前
株式会社ダイヘン
レーザ加工装置
2か月前
株式会社ダイヘン
積層造形溶接方法
11日前
株式会社ダイヘン
プラズマ処理装置
1か月前
株式会社ダイヘン
ロボット制御システム
1日前
株式会社ダイヘン
プリント基板の補強構造
1か月前
株式会社ダイヘン
充電装置および充電設備
1か月前
株式会社ダイヘン
充電装置および充電設備
1か月前
株式会社ダイヘン
給電システム及び受電装置
1か月前
株式会社ダイヘン
巻回支援装置及び取付方法
1か月前
株式会社ダイヘン
2重シールドティグ溶接方法
11日前
株式会社ダイヘン
2重シールドティグ溶接方法
1か月前
株式会社ダイヘン
2重シールドティグ溶接方法
1か月前
株式会社ダイヘン
サブマージアーク溶接システム
2か月前
株式会社ダイヘン
サブマージアーク溶接システム
2か月前
株式会社ダイヘン
サブマージアーク溶接システム
4日前
株式会社ダイヘン
サブマージアーク溶接システム
4日前
株式会社ダイヘン
交流消耗電極アーク溶接制御方法
1か月前
株式会社ダイヘン
交流消耗電極アーク溶接制御方法
1か月前
株式会社ダイヘン
交流消耗電極アーク溶接制御方法
11日前
白山商事株式会社
圧着接続部材
12日前
株式会社ダイヘン
溶接検査装置および溶接検査方法
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ