TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024169438
公報種別
公開特許公報(A)
公開日
2024-12-05
出願番号
2024145112,2023084178
出願日
2024-08-27,2019-12-06
発明の名称
ビデオピクチャの復号および符号化の方法ならびに装置
出願人
華為技術有限公司
,
HUAWEI TECHNOLOGIES CO.,LTD.
代理人
個人
,
個人
主分類
H04N
19/513 20140101AFI20241128BHJP(電気通信技術)
要約
【課題】ビデオピクチャの復号および符号化の方法と、ビデオピクチャの復号および符号化の装置とを提供する。
【解決手段】マージモードまたはスキップモードが使用されると決定されるとき、動きベクトル差分を用いたマージモード(MMVD)インジケータが真であることが復号を通じて決定される場合、三角予測ユニット(triangle prediction unit,triangle PU)インジケータはコーディングされなくてもよい。triangle PUインジケータは、MMVDインジケータが偽であることが復号を通じて決定されるときにのみコーディングされる。これは、使用されるコーディングリソースの量を減らし、ビットストリームのビットオーバーヘッドを減らすことができる。
【選択図】図10A
特許請求の範囲
【請求項1】
ビデオピクチャ復号方法であって、
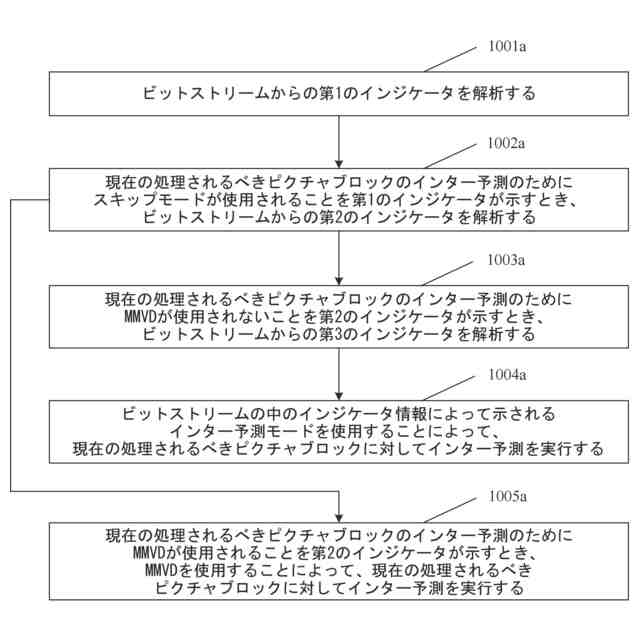
ビットストリームからの第1のインジケータを解析するステップと、
現在の処理されるべきピクチャブロックのインター予測のためにスキップモードが使用されることを前記第1のインジケータが示すとき、前記ビットストリームからの第2のインジケータを解析するステップと、
前記現在の処理されるべきピクチャブロックのインター予測のために動きベクトル差分を用いたマージモード(MMVD)が使用されないことを前記第2のインジケータが示すとき、前記ビットストリームからの第3のインジケータを解析するステップであって、前記第3のインジケータが第1の値であるとき、それは、前記現在の処理されるべきピクチャブロックのインター予測のために三角予測ユニットモードが使用されることが許容されることを示し、または、前記第3のインジケータが第2の値であるとき、それは、前記現在の処理されるべきピクチャブロックのインター予測のために三角予測ユニットモードが使用されることが許容されないことを示し、前記第3のインジケータがピクチャブロックレベルのインジケータである、ステップと、
前記ビットストリームの中のインジケータ情報によって示されるインター予測モードを使用することによって、前記現在の処理されるべきピクチャブロックに対してインター予測を実行するステップであって、前記インジケータ情報が、前記第1のインジケータ、前記第2のインジケータ、および前記第3のインジケータのうちの1つまたは複数を含む、ステップと
を有する方法。
続きを表示(約 2,800 文字)
【請求項2】
前記ビットストリームの中のインジケータ情報によって示されるインター予測モードを使用することによって、前記現在の処理されるべきピクチャブロックに対してインター予測を実行する前記ステップが、
前記第3のインジケータが前記第1の値であるとき、前記三角予測ユニットモードを使用することによって、前記現在の処理されるべきピクチャブロックに対してインター予測を実行することを許容するステップ、または、
前記第3のインジケータが前記第2の値であるとき、前記スキップモードを使用することによって、前記現在の処理されるべきピクチャブロックに対してインター予測を実行することを許容するステップ
を含む、請求項1に記載の方法。
【請求項3】
前記第1の値が0であり、前記第2の値が1である、請求項1または2に記載の方法。
【請求項4】
前記ビットストリームの中のインジケータ情報によって示されるインター予測モードを使用することによって、前記現在の処理されるべきピクチャブロックに対してインター予測を実行する前記ステップが、
前記現在の処理されるべきピクチャブロックのインター予測のために前記MMVDが使用されることを前記第2のインジケータが示すとき、前記MMVDを使用することによって、前記現在の処理されるべきピクチャブロックに対してインター予測を実行するステップ
を含む、請求項1に記載の方法。
【請求項5】
前記現在の処理されるべきピクチャブロックのインター予測のために前記スキップモードが使用されないことを前記第1のインジケータが示すとき、前記ビットストリームからの第4のインジケータを解析するステップと、
前記現在の処理されるべきピクチャブロックのインター予測のためにマージモードが使用されることを前記第4のインジケータが示すとき、前記ビットストリームからの第5のインジケータを解析するステップと、
前記現在の処理されるべきピクチャブロックのインター予測のためにMMVDが使用されないことを前記第5のインジケータが示すとき、前記ビットストリームからの第6のインジケータを解析するステップであって、前記第6のインジケータがピクチャブロックレベルのインジケータであり、前記第6のインジケータが第3の値であるとき、それは、前記現在の処理されるべきピクチャブロックのインター予測のために三角予測ユニットモードが使用されることが許容されることを示し、または、前記第6のインジケータが第4の値であるとき、それは、前記現在の処理されるべきピクチャブロックのインター予測のために三角予測ユニットモードが使用されることが許容されないことを示す、ステップと
をさらに有する、請求項1から4のいずれか一項に記載の方法。
【請求項6】
前記ビットストリームの中のインジケータ情報によって示されるインター予測モードを使用することによって、前記現在の処理されるべきピクチャブロックに対してインター予測を実行する前記ステップが、
前記第6のインジケータが前記第3の値であるとき、前記三角予測ユニットモードを使用することによって、前記現在の処理されるべきピクチャブロックに対してインター予測を実行することを許容するステップ、または、
前記第6のインジケータが前記第4の値であるとき、前記マージモードを使用することによって、前記現在の処理されるべきピクチャブロックに対してインター予測を実行することを許容するステップ
を含む、請求項5に記載の方法。
【請求項7】
前記第3の値が0であり、前記第4の値が1である、請求項5または6に記載の方法。
【請求項8】
前記ビットストリームからの第3のインジケータを解析する前記ステップが、
前記三角予測ユニットモードがインター予測のために使用されることが許容されるという条件を前記現在の処理されるべきピクチャブロックが満たすとき、前記ビットストリームからの前記第3のインジケータを解析するステップ
を含む、請求項1から7のいずれか一項に記載の方法。
【請求項9】
ビデオピクチャ復号方法であって、
ビットストリームからの第4のインジケータを解析するステップと、
現在の処理されるべきピクチャブロックのインター予測のためにマージモードが使用されることを前記第4のインジケータが示すとき、前記ビットストリームからの第5のインジケータを解析するステップと、
前記現在の処理されるべきピクチャブロックのインター予測のために動きベクトル差分を用いたマージモード(MMVD)が使用されることが許容されないことを前記第5のインジケータが示すとき、前記ビットストリームからの第6のインジケータを解析するステップであって、前記第6のインジケータが第3の値であるとき、それは、前記現在の処理されるべきピクチャブロックのインター予測のために三角予測ユニットモードが使用されることが許容されることを示し、または、前記第6のインジケータが第4の値であるとき、それは、前記現在の処理されるべきピクチャブロックのインター予測のために三角予測ユニットモードが使用されることが許容されないことを示し、前記第6のインジケータがピクチャブロックレベルのインジケータである、ステップと、
前記ビットストリームの中のインジケータ情報によって示されるインター予測モードを使用することによって、前記現在の処理されるべきピクチャブロックに対してインター予測を実行するステップであって、前記インジケータ情報が、前記第4のインジケータ、前記第5のインジケータ、および前記第6のインジケータのうちの1つまたは複数を含む、ステップと
を有する方法。
【請求項10】
前記ビットストリームの中のインジケータ情報によって示されるインター予測モードを使用することによって、前記現在の処理されるべきピクチャブロックに対してインター予測を実行する前記ステップが、
前記第6のインジケータが前記第3の値であるとき、前記三角予測ユニットモードを使用することによって、前記現在の処理されるべきピクチャブロックに対してインター予測を実行することを許容するステップ、または、
前記第6のインジケータが前記第4の値であるとき、前記マージモードを使用することによって、前記現在の処理されるべきピクチャブロックに対してインター予測を実行することを許容するステップ
を含む、請求項9に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
関連出願の相互参照
本出願は、その全体が参照によって本明細書に組み込まれる、2018年12月7日に中国特許庁に出願された「VIDEO PICTURE PREDICTION METHOD AND APPARATUS」という表題の中国特許出願第201811497390.2号の優先権を主張する。本出願は、その全体が参照によって本明細書に組み込まれる、2018年12月21日に中国特許庁に出願された「VIDEO PICTURE DECODING AND ENCODING METHOD AND APPARATUS」という表題の中国特許出願第201811574426.2号の優先権を主張する。
続きを表示(約 2,400 文字)
【0002】
本出願は、ピクチャコーディング技術の分野に関し、詳細には、ビデオピクチャ復号方法、ビデオピクチャ符号化方法、ビデオピクチャ復号装置、およびビデオピクチャ符号化装置に関する。
【背景技術】
【0003】
情報技術の発展により、高精細テレビジョン、ウェブ会議、IPTV、および3Dテレビジョンなどのビデオサービスが急速に発展している。直感性および高い効率などの利点により、ビデオ信号は、人々の日常生活において主要な情報取得方式になっている。ビデオ信号は、大量のデータを含むので、大量の送信帯域幅および記憶空間を占有する。ビデオ信号を効果的に送信して記憶するために、圧縮コーディングがビデオ信号に対して実行される必要がある。ビデオ圧縮技術は、ビデオ応用の分野において欠かせない重要技術に徐々になっている。
【0004】
ビデオコーディング圧縮の基本的な原理は、空間領域と、時間領域と、符号語との間の相関を使用することによって、冗長性を最大限減らすことである。現在、普及している方法は、ピクチャブロックベースのハイブリッドビデオコーディングフレームワークを使用することによって、ならびに、予測(イントラ予測およびインター予測を含む)、変換、量子化、およびエントロピーコーディングなどのステップを実行することによって、ビデオコーディング圧縮を実施することである。
【0005】
様々なビデオ符号化/復号方法において、インター予測における動き推定/動き補償は、符号化/復号性能に影響する重要技術である。既存のインター予測では、動きベクトル差分を用いたマージモード(merge motion vector difference, MMVD)および三角予測ユニット(triangle prediction unit, triangle PU)モードが追加される。しかしながら、既存のインター予測の実装形態では、同じ条件のもとで、MMVDとtriangle PUの両方がコーディングされる必要がある。その結果、両方のモードを両立させる際に冗長性が生じる。
【発明の概要】
【課題を解決するための手段】
【0006】
本出願は、MMVDとtriangle PUモードを両立させる際に生じる冗長性の従来の問題をある程度解決するための、ビデオピクチャの復号および符号化の方法、ならびにビデオピクチャの復号および符号化の装置を提供する。
【0007】
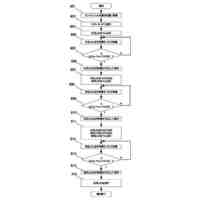
第1の態様によれば、本出願の実施形態は、ビデオピクチャ復号方法を提供し、この方法は、
ビットストリームからの第1のインジケータを解析するステップと、現在の処理されるべきピクチャブロックのインター予測のためにスキップモードが使用される(たとえば、スキップモードが許容される)ことを第1のインジケータが示すとき、ビットストリームからの第2のインジケータを解析するステップと、現在の処理されるべきピクチャブロックのインター予測のために動きベクトル差分を用いたマージモード(MMVD)が使用されない(たとえば、スキップモードにおいて、現在の処理されるべきピクチャブロックのインター予測のためにMMVDが使用されない)ことを第2のインジケータが示すとき、ビットストリームからの第3のインジケータを解析するステップとを含み、第3のインジケータが第1の値であるとき、それは、現在の処理されるべきピクチャブロックのインター予測のために三角予測ユニットモードが使用される(たとえば、スキップモードにおいて、現在の処理されるべきピクチャブロックのインター予測のために三角予測ユニットモードが使用される)ことを示し、または、第3のインジケータが第2の値であるとき、それは、現在の処理されるべきピクチャブロックのインター予測のために三角予測ユニットモードが使用されることが許容されない(たとえば、スキップモードにおいて、現在の処理されるべきピクチャブロックのインター予測のために三角予測ユニットモードが使用されることが許容されない)ことを示す。
【0008】
第3のインジケータはsps_triangle_enabled_flagではなく、ビットストリームの中のインジケータ情報によって示されるインター予測モードを使用することによって、現在の処理されるべきピクチャブロックに対してインター予測が実行され、インジケータ情報は、第1のインジケータ、第2のインジケータ、および第3のインジケータのうちの1つまたは複数を含むことに留意されたい。
【0009】
第3のインジケータが解析される前に別のインジケータがさらに解析され得る事例が、本出願において排除されないことを理解されたい。たとえば、第3のインジケータは、別のインジケータがfalseであると解析された後に解析され得る。
【0010】
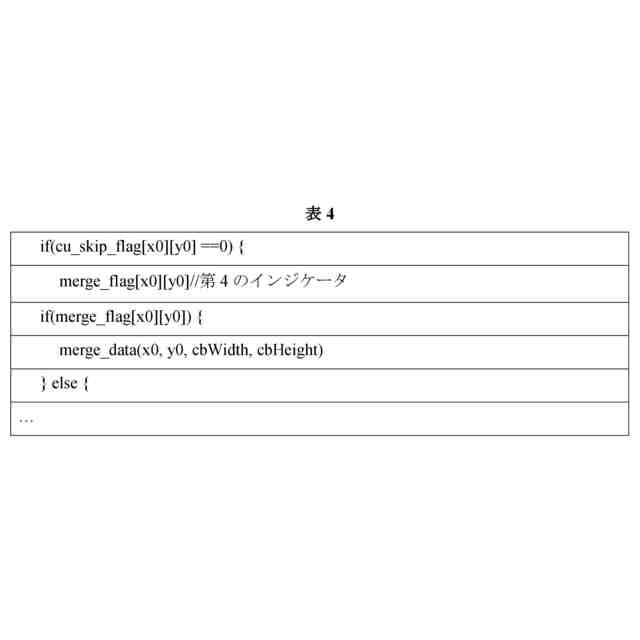
たとえば、第1のインジケータはcu_skip_flag[x0][y0]とも呼ばれてもよく、第1のインジケータは標準的なテキストまたは符号である前述の名称を使用してもよい。第2のインジケータは、skip_mmvd_flag[x0][y0]、mmvd_flag[x0][y0]、またはmerge_mmvd_flag[x0][y0]とも呼ばれてもよく、第2のインジケータは標準的なテキストまたは符号である前述の名称のうちの1つを使用してもよい。第3のインジケータは、skip_triangle_flag[x0][y0]、triangle_flag[x0][y0]、またはmerge_triangle_flag[x0][y0]とも呼ばれてもよく、第3のインジケータは標準的なテキストまたは符号である前述の名称のうちの1つを使用してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
華為技術有限公司
スケーラブルな符号化及び復号方法及び装置
3日前
華為技術有限公司
クロマ量子化パラメータのマッピング関数のシグナリングのための方法及び装置
11日前
個人
防犯AIプラグイン
22日前
個人
テレビ会議拡張システム
17日前
日本放送協会
無線通信装置
22日前
キヤノン電子株式会社
画像読取装置
12日前
キヤノン電子株式会社
画像処理装置
23日前
TOA株式会社
音響システム
18日前
個人
無線中継赤外線コピーリモコン
19日前
キヤノン株式会社
画像読取装置
9日前
理想科学工業株式会社
連絡システム
17日前
株式会社ニコン
撮像装置
17日前
株式会社ニコン
カメラボディ
9日前
株式会社ユピテル
撮像装置等
17日前
二幸産業株式会社
建物設備の管理装置
4日前
17LIVE株式会社
サーバ及び方法
10日前
キヤノン株式会社
冷却装置と電子機器
18日前
キヤノン株式会社
撮像装置
17日前
株式会社JVCケンウッド
映像記録装置
18日前
キヤノン株式会社
撮像装置
2日前
株式会社国際電気
無線通信システム
22日前
ニッタン株式会社
引率支援システム
17日前
KDDI株式会社
基地局及び通信端末
18日前
株式会社豊田自動織機
情報送受信方法
2日前
株式会社JVCケンウッド
撮影画像処理装置
19日前
日産自動車株式会社
スピーカ取付構造
22日前
株式会社国際電気
滞留検知システム
24日前
シャープ株式会社
動画像符号化装置、復号装置
18日前
キヤノン株式会社
画像読取装置、画像形成装置
22日前
アズビル株式会社
情報処理装置及びプログラム
22日前
日本電気株式会社
光中継器、及び光通信システム
10日前
株式会社デンソー
通信システム
18日前
キヤノン株式会社
電子機器
2日前
アイホン株式会社
制御システム
22日前
株式会社デンソー
通信システム
17日前
三菱電機株式会社
光通信装置
2日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ