TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024166323
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2024157211,2021012745
出願日
2024-09-11,2021-01-29
発明の名称
領域登録方法及び領域登録システム
出願人
ヤンマーパワーテクノロジー株式会社
代理人
個人
,
個人
,
個人
主分類
A01B
69/00 20060101AFI20241121BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】一度設定された枕地領域などの大きさを任意の広さに変更することによって、作業者が希望する作業領域や枕地領域を再度設定する、つまり登録領域を設定し見直すことができる領域登録方法及び領域登録システムを提供する。
【解決手段】走行領域内を自律走行する作業車両の情報を設定することと、前記走行領域に含まれ、前記作業車両が作業を行う作業領域を設定することと、前記走行領域に含まれ、前記作業領域の外側に配される枕地領域を設定することと、前記作業領域及び前記枕地領域が設定された後に前記枕地領域の設定情報を入力する操作を受け付けた場合に、入力された当該設定情報に基づいて前記作業領域及び前記枕地領域の大きさを変更することと、を実行する。
【選択図】図3
特許請求の範囲
【請求項1】
走行領域内を自律走行する作業車両の情報を設定することと、
前記走行領域に含まれ、前記作業車両が作業を行う作業領域を設定することと、
前記走行領域に含まれ、前記作業領域の外側に配される枕地領域を設定することと、
前記作業領域及び前記枕地領域が設定された後に前記枕地領域の設定情報を入力する操作を受け付けた場合に、入力された当該設定情報に基づいて前記作業領域及び前記枕地領域の大きさを変更することと、
を実行する領域登録方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律走行作業車両が走行しながら作業する作業経路などを生成して設定する際に、オペレータ或いはユーザなどが、希望する枕地領域などを適宜に設定し直して変更・登録することができる領域登録方法及び領域登録システムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
自律走行作業車両が走行する作業経路を生成するためには、走行領域として180度の方向転換などを行うために設ける枕地領域と、この枕地領域の内側に配される作業領域などと、を予め区分けして登録しておく必要がある。このような走行経路の生成方法に関しては、特許文献1に記載のものが知られている。
【0003】
この特許文献1には、作業車両の車両情報などから作業行程数を決定することで枕地領域を設定し、枕地領域の大きさに応じて作業領域が設定される方法が記載されている。ここでの枕地領域の設定方法においては、車両情報から枕地領域を設定されるが、作業車両の安全性が確保される幅と作業車両の旋回可能な幅とを確保することができる範囲を最小範囲とする、枕地領域が自動的に設定されている。
【先行技術文献】
【特許文献】
【0004】
WO2015/119263号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、このように枕地領域の大きさが自動的に決定されると、必然的に作業領域の大きさも自動的に決定されてしまい、オペレータ或いはユーザなど(以下、これらをまとめて「作業者」と呼ぶことにする。)の思い通りに枕地領域と作業領域を設定することはできていなかった。
【0006】
そこで、本発明の目的は、一度設定された枕地領域などの大きさを任意の広さに変更することによって、作業者が希望する作業領域や枕地領域を再度設定する、つまり登録領域の設定を見直すことができる領域登録方法及び領域登録システムを提供することである。
【課題を解決するための手段】
【0007】
本発明に係る領域登録方法は、走行領域内を自律走行する作業車両の情報を設定することと、前記走行領域に含まれ、前記作業車両が作業を行う作業領域を設定することと、前記走行領域に含まれ、前記作業領域の外側に配される枕地領域を設定することと、前記作業領域及び前記枕地領域が設定された後に前記枕地領域の設定情報を入力する操作を受け付けた場合に、入力された当該設定情報に基づいて前記作業領域及び前記枕地領域の大きさを変更することと、を実行する方法である。
【0008】
本発明に係る領域登録システムは、走行領域内を自律走行する作業車両の情報を設定する車両情報設定部と、前記走行領域に含まれ、前記作業車両が作業を行う作業領域を設定する作業領域設定部と、前記走行領域に含まれ、前記作業領域の外側に配される枕地領域を設定する枕地領域設定部と、前記作業領域及び前記枕地領域が設定された後に前記枕地領域の設定情報を入力する操作を受け付けた場合に、入力された当該設定情報に基づいて前記作業領域及び前記枕地領域の大きさを変更する変更部と、を備えるシステムである。
【図面の簡単な説明】
【0009】
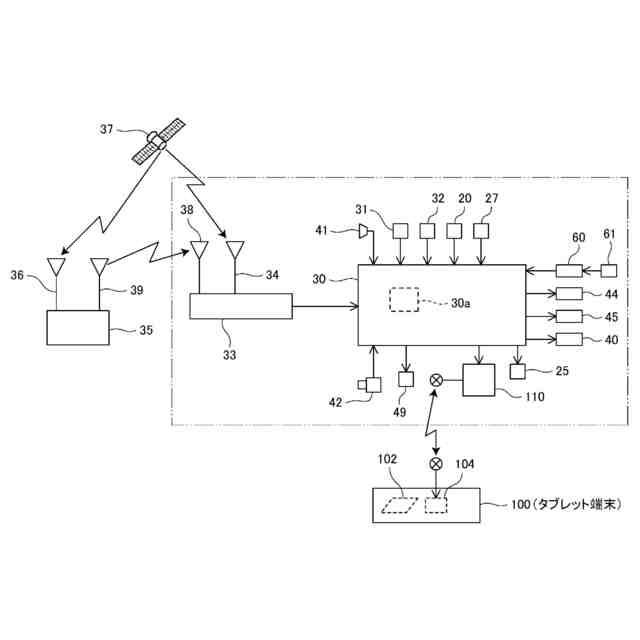
図1は、本発明の第1の実施形態に係る自律走行作業車両とGPS衛星と基準局を示す概略側面図である。
図2は、本発明の第1の実施形態に係る自律走行作業車両とGPS衛星と基準局を示す制御ブロック図である。
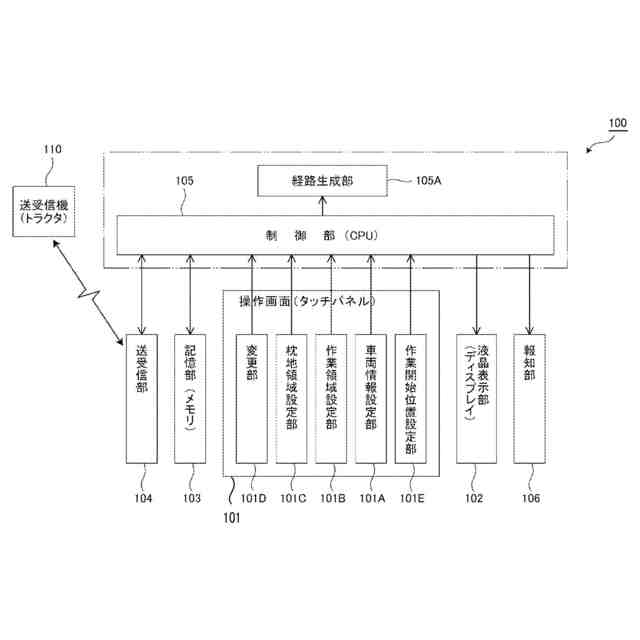
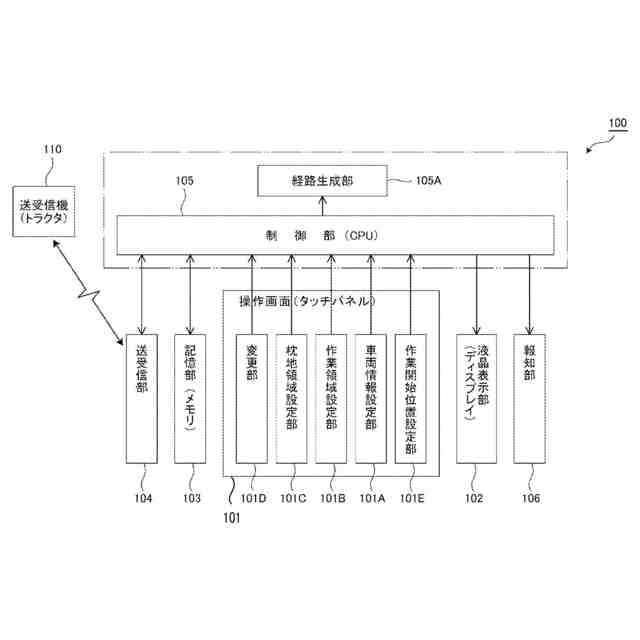
図3は、本発明の第1の実施形態に係る遠隔操作装置の構成を示すブロック図である。
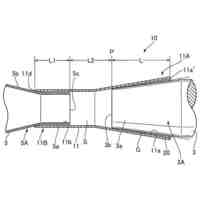
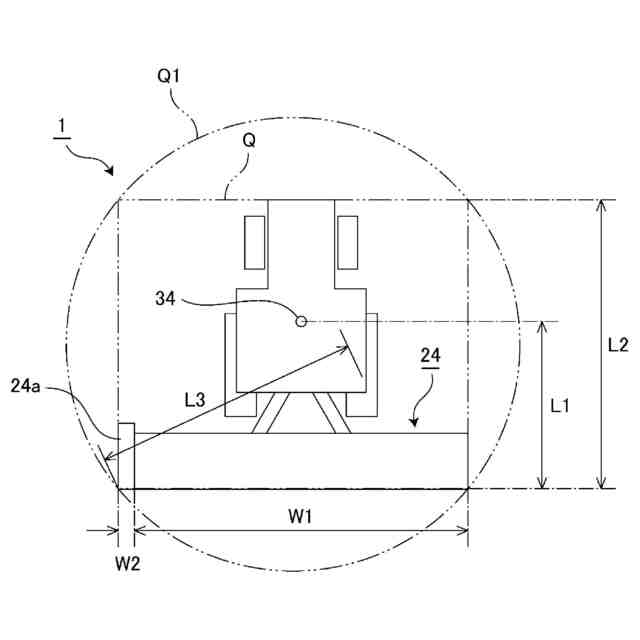
図4は、本発明の第1の実施形態に係る自律走行作業車両の基準となる各部位の長さなどの諸元を示す説明図である。
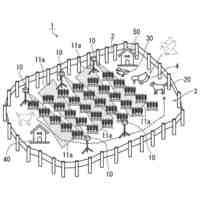
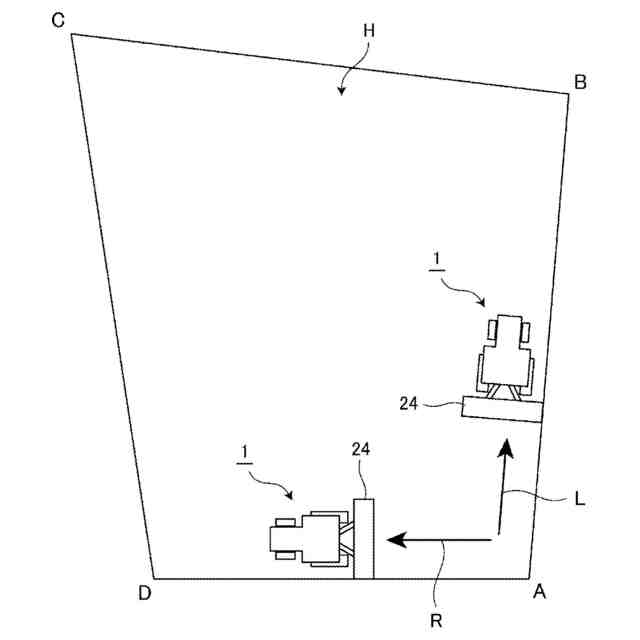
図5は、圃場データを取得するための行程を示す説明図である。
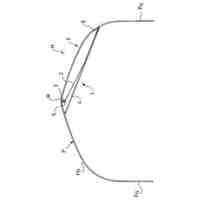
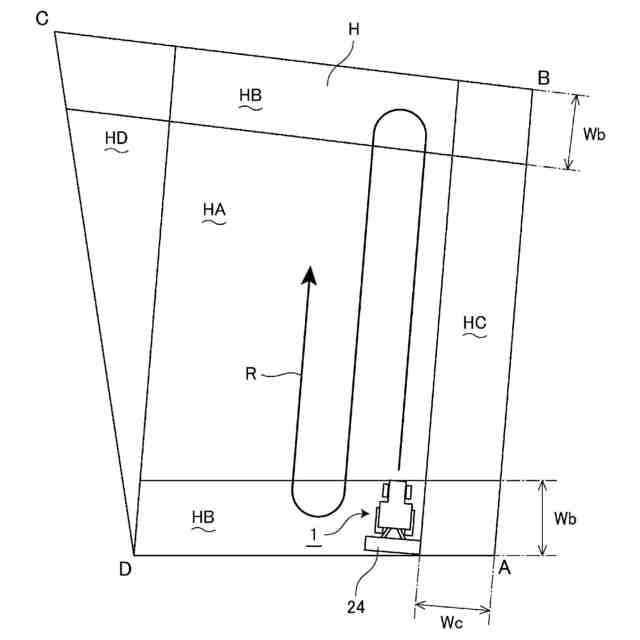
図6は、基準経路の走行可能な方向を示す説明図である。
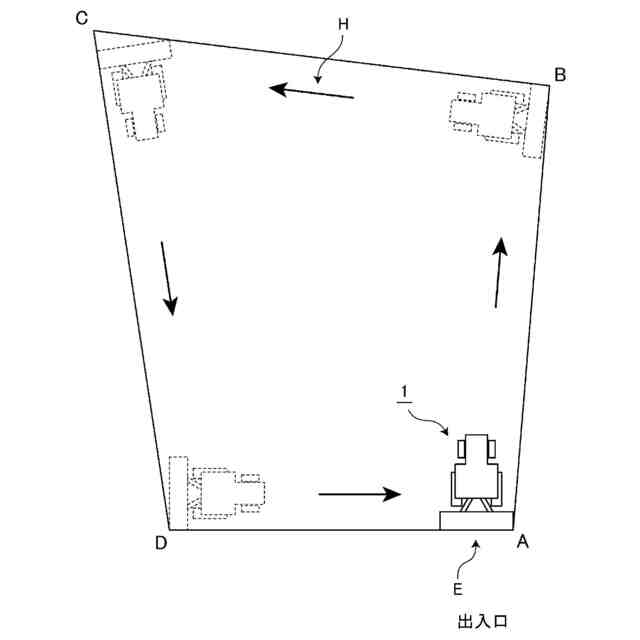
図7は、圃場における作業範囲と枕地と走行経路を示す説明図である。
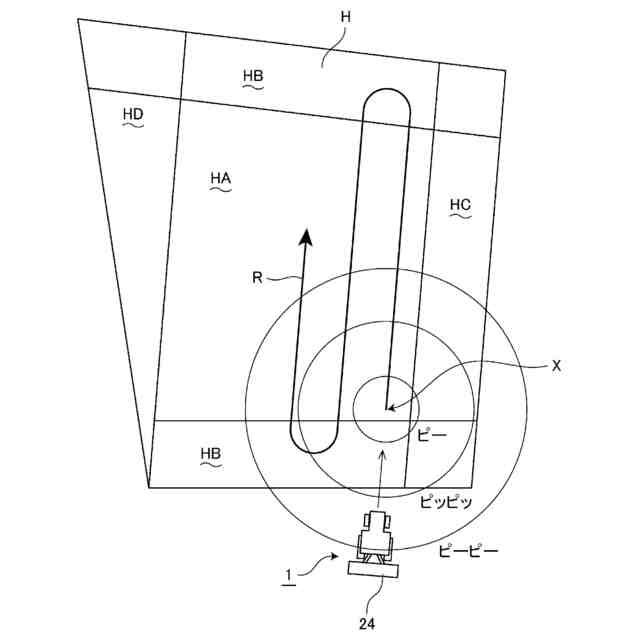
図8は、本発明の第1の実施形態に係る自律走行作業車両が作業開始位置へ近づくときの状態を示す説明図である。
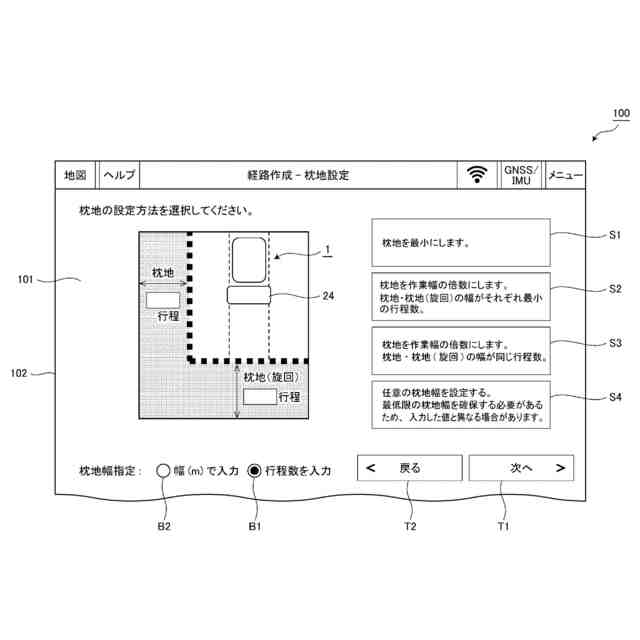
図9は、本発明の第1の実施形態に係る変更部での枕地幅などの変更作業の際の操作画面を示す説明図である。
図10は、本発明の第1の実施形態に係る変更部での枕地幅などの変更作業の際の操作例を示す第1実施例のフローチャートである。
図11Aは、従来の自動枕地幅の設定に伴う設定走行経路の不適格性を示す説明図である。
図11Bは、本実施形態での設定走行経路の適正さを示す説明図である。
図12は、本発明の第1の実施形態に係る変更部での枕地幅などの変更作業の際の操作例を示す第1の別の実施例のフローチャートである。
図13は、本発明の第1の実施形態に係る変更部での枕地幅などの変更作業の際の操作例を示す第1の別の実施例(設定値が小さすぎる場合)のフローチャートである。
図14は、本発明の第1の実施形態に係る変更部での枕地幅などの変更作業の際の操作例を示す第1の別の実施例(設定値が大きすぎる場合)のフローチャートである。
図15は、本発明の第1の別の実施形態に係る変更部での変更作業の際の操作画面を示す説明図である。
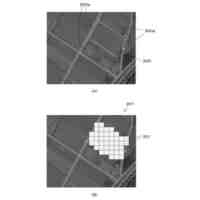
図16は、本発明の第1の別の実施形態での作業エリアの設定方法を示す説明図であり、(a)は自律走行作業車両の走行軌跡を示し、(b)は設定された作業エリアを示す図である。
図17は、本発明の第1の別の実施形態において設定された作業エリアでの自律走行作業車両の走行経路を示す説明図である。
図18は、本発明の第2の実施形態に係る変更部での作業領域の変更作業の際の操作画面を示す説明図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について添付図面を参照しながら説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
除草装置
1か月前
個人
柄杓じょうろ
25日前
個人
ペット用リード
14日前
個人
猫砂ふるいパック
1か月前
個人
水耕栽培装置
1か月前
個人
植物栽培装置
1か月前
個人
動物用トイレ
5日前
井関農機株式会社
作業機
26日前
個人
引張犬散歩補助ベルト
1か月前
株式会社シマノ
釣竿
5日前
個人
植物の栽培管理システム
25日前
個人
養殖システム
11日前
株式会社ウエ・ルコ
ダニ捕獲器
12日前
株式会社共和
果実回し具
25日前
個人
タケノコの多収栽培法
26日前
東都興業株式会社
支持部材
5日前
株式会社大貴
動物用トイレ
12日前
井関農機株式会社
作業車両
12日前
株式会社シマノ
釣竿
1か月前
個人
動物用罠及び罠用装置
1か月前
日機装株式会社
浄化ユニット
1か月前
株式会社シマノ
両軸受リール
1か月前
松山株式会社
農作業機
27日前
松山株式会社
農作業機
1か月前
伊東電機株式会社
植物栽培装置
25日前
個人
水活用による果樹の結実安定化法
1か月前
個人
魚介類養殖システム
11日前
花王株式会社
殺菌剤組成物
1か月前
マコー株式会社
水生生物育成装置
25日前
株式会社猫壱
ペット用食器
1か月前
株式会社クボタ
収穫機
1か月前
いであ株式会社
害鳥獣防除システム
11日前
株式会社大阪製薬
ダニ捕獲具
5日前
グローブライド株式会社
釣竿
25日前
東都興業株式会社
シート巻取り装置
12日前
株式会社和田電業社
遠隔操作切断装置
12日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ