TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024165836
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023082369
出願日
2023-05-18
発明の名称
制御装置、移動体、経路計画装置、プログラム、及び、学習済みモデルを生成するための方法
出願人
学校法人明治大学
代理人
弁理士法人RYUKA国際特許事務所
主分類
G05D
1/43 20240101AFI20241121BHJP(制御;調整)
要約
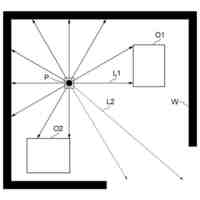
【解決手段】 自律移動する移動体を制御するための制御装置が、移動体の出発地点から目的地点までの予定経路を決定する経路計画部を備える。経路計画部は、複数の地点のそれぞれに対応する複数のノード、及び、複数のノードのそれぞれを結合する1以上のエッジを含む重み付きグラフを記憶する第2記憶装置を参照して、出発地点又は出発地点の近傍に配された地点に対応するノードである始点ノードから、目的地点又は目的地点の近傍に配された地点に対応するノードである終点ノードまでのエッジの重みの和が最も小さくなるようなノード列を導出することで、予定経路を決定する。重み付きグラフにおいて、1以上のエッジのそれぞれの重みは、各エッジが結合する2個のノードのそれぞれに対応する2個の地点のそれぞれの参照画像が類似する度合いを示す。
【選択図】図1
特許請求の範囲
【請求項1】
予め定められた地理的範囲の内部を自律移動する移動体を制御するための制御装置であって、
前記移動体は、前記移動体の周囲を撮像する第1撮像装置を備え、
前記制御装置は、前記地理的範囲の内部に配される複数の地点のそれぞれにおいて予め撮像された画像である複数の参照画像を、前記複数の地点の識別情報と対応付けて記憶する第1記憶装置にアクセス可能に構成されており、
前記制御装置は、
前記移動体の出発地点から目的地点までの予定経路を決定する経路計画部と、
前記複数の地点のうち、前記予定経路を構成する1以上の地点である1以上の中継地点を示す経路情報を取得する経路情報取得部と、
前記1以上の中継地点のうち、前記移動体の目標となる目標地点を決定する目標地点決定部と、
前記第1記憶装置を参照して、前記複数の参照画像のうち、前記目標地点に対応付けられた参照画像である目標画像を取得する目標画像取得部と、
前記移動体の現在の位置及び姿勢において前記第1撮像装置が撮像した画像である現在画像を取得する現在画像取得部と、
前記目標画像及び前記現在画像に基づいて、前記移動体の現在の位置及び姿勢と、前記目標地点において目標となる前記移動体の位置及び姿勢との間の相対的な関係を示す指標である相対指標の値を導出する相対指標導出部と、
を備え、
前記相対指標導出部は、(i)前記目標画像及び前記現在画像を、学習済みの推定モデルに入力し、(ii)前記推定モデルから、前記相対指標に関する推定結果に対応する出力を導出し、
前記経路計画部は、前記複数の地点のそれぞれに対応する複数のノード、及び、前記複数のノードのそれぞれを結合する1以上のエッジを含む重み付きグラフを記憶する第2記憶装置を参照して、前記出発地点又は前記出発地点の近傍に配された地点に対応するノードである始点ノードから、前記目的地点又は前記目的地点の近傍に配された地点に対応するノードである終点ノードまでのエッジの重みの和が最も小さくなるようなノード列を導出することで、前記予定経路を決定し、
前記重み付きグラフにおいて、前記1以上のエッジのそれぞれの重みは、各エッジが結合する2個のノードのそれぞれに対応する2個の地点のそれぞれの参照画像が類似する度合いを示す、
制御装置。
続きを表示(約 1,700 文字)
【請求項2】
前記推定モデルは、
前記目標画像及び前記現在画像を入力とし、前記目標画像の特徴量及び前記現在画像の特徴量を抽出する特徴量抽出部と、
前記目標画像の特徴量及び前記現在画像の特徴量を入力とし、前記相対指標に関する前記推定結果を出力する相対指標推定部と、
を有する、
請求項1に記載の制御装置。
【請求項3】
前記特徴量抽出部は、
前記目標画像を入力し、前記目標画像の特徴量を抽出する第1抽出部と、
前記現在画像を入力し、前記現在画像の特徴量を抽出する第2抽出部と、
を含み、
前記第1抽出部は、(i)前記目標画像を学習済みの第1抽出モデルに入力し、(ii)前記第1抽出モデルから、前記目標画像の特徴量に関する推定結果に対応する出力を導出し、
前記第2抽出部は、(i)前記現在画像を学習済みの第2抽出モデルに入力し、(ii)前記第2抽出モデルから、前記現在画像の特徴量に関する推定結果に対応する出力を導出し、
前記第1抽出モデル及び前記第2抽出モデルは、画像を入力とし、当該画像の特徴ベクトルを出力とする距離学習により生成された学習済みモデルである、
請求項2に記載の制御装置。
【請求項4】
複数の第1学習用データを含む第1学習用データセットを取得する第1データセット取得部と、
前記第1学習用データセットに含まれる2個の第1学習用データの組み合わせを用いて機械学習を実行することにより、学習済みの前記推定モデルを生成する推定モデル生成部と、
をさらに備え、
前記第1学習用データのそれぞれは、画像と、当該画像を撮像した第2撮像装置の位置である撮像位置と、前記第2撮像装置の姿勢である撮像姿勢とが対応付けられたデータであり、
前記推定モデル生成部は、複数の前記組み合わせのそれぞれについて、前記2個の第1学習用データの一方に含まれる第1画像と、前記2個の第1学習用データの他方に含まれる第2画像とを入力とし、前記第1画像に対応する撮像位置及び撮像姿勢と、前記第2画像に対応する撮像位置及び撮像姿勢との間の相対的な関係の推定結果に関する値を出力とする機械学習により、前記推定モデルを生成する、
請求項1に記載の制御装置。
【請求項5】
前記相対指標導出部が導出した前記相対指標に基づいて前記移動体を移動させる移動制御部をさらに備える、
請求項1に記載の制御装置。
【請求項6】
パーティクルフィルタ又は逐次モンテカルロ法により前記移動体の現在位置を推定し、当該推定された現在位置に基づいて前記相対指標の値を補正する補正部をさらに備え、
前記移動制御部は、前記補正部が補正した前記相対指標の値に基づいて前記移動体を移動させる、
請求項5に記載の制御装置。
【請求項7】
前記出発地点において前記第1撮像装置が撮像した画像である出発地画像を取得する出発地画像取得部と、
前記複数の参照画像のそれぞれが前記出発地画像に類似する度合いを導出する類似度導出部と、
前記出発地画像に最も類似する参照画像に対応するノードを、前記始点ノードとして決定する始点ノード決定部と、
をさらに備える、
請求項1に記載の制御装置。
【請求項8】
ユーザからの入力に基づいて、前記終点ノードを決定する終点ノード決定部をさらに備える、
請求項1に記載の制御装置。
【請求項9】
自律的に移動可能な移動体であって、
請求項1から請求項8までの何れか一項に記載の制御装置と、
前記制御装置の指示に従って前記移動体を移動させる駆動部と、
を備える、
移動体。
【請求項10】
コンピュータを、請求項1から請求項8までの何れか一項に記載の制御装置として機能させるためのプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、移動体、経路計画装置、プログラム、及び、学習済みモデルを生成するための方法に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
特許文献1には、画像及び位置姿勢のデータベースを用いてロボットの現在位置姿勢を決定する方法が開示されている。特許文献2には、画像及び位置のデータベースを用いて移動体の自己位置を推定する方法が開示されている。特許文献3には、環境地図及び自己位置推定手段を備えない自律移動システムが開示されている。
(先行技術文献)
(特許文献)
(特許文献1) 特許第6632173号公報
(特許文献2) 特開2016-162013号公報
(特許文献3) 特開2022-187529号公報
【発明の概要】
【課題を解決するための手段】
【0003】
本発明の第1の態様においては、制御装置が提供される。上記の制御装置は、例えば、予め定められた地理的範囲の内部を自律移動する移動体を制御する。上記の制御装置において、移動体は、例えば、移動体の周囲を撮像する第1撮像装置を備える。上記の制御装置は、例えば、地理的範囲の内部に配される複数の地点のそれぞれにおいて予め撮像された画像である複数の参照画像を、複数の地点の識別情報と対応付けて記憶する第1記憶装置にアクセス可能に構成される。
【0004】
上記の制御装置は、例えば、移動体の出発地点から目的地点までの予定経路を決定する経路計画部を備える。上記の制御装置は、例えば、複数の地点のうち、予定経路を構成する1以上の地点である1以上の中継地点を示す経路情報を取得する経路情報取得部を備える。上記の制御装置は、例えば、1以上の中継地点のうち、移動体の目標となる目標地点を決定する目標地点決定部を備える。上記の制御装置は、例えば、第1記憶装置を参照して、複数の参照画像のうち、目標地点に対応付けられた参照画像である目標画像を取得する目標画像取得部を備える。上記の制御装置は、例えば、移動体の現在の位置及び姿勢において第1撮像装置が撮像した画像である現在画像を取得する現在画像取得部を備える。上記の制御装置は、例えば、目標画像及び現在画像に基づいて、移動体の現在の位置及び姿勢と、目標地点において目標となる移動体の位置及び姿勢との間の相対的な関係を示す指標である相対指標の値を導出する相対指標導出部を備える。
【0005】
上記の何れかの制御装置において、相対指標導出部は、例えば、(i)目標画像及び現在画像を、学習済みの推定モデルに入力し、(ii)推定モデルから、相対指標に関する推定結果に対応する出力を導出する。上記の何れかの制御装置において、経路計画部は、例えば、複数の地点のそれぞれに対応する複数のノード、及び、複数のノードのそれぞれを結合する1以上のエッジを含む重み付きグラフを記憶する第2記憶装置を参照して、出発地点又は出発地点の近傍に配された地点に対応するノードである始点ノードから、目的地点又は目的地点の近傍に配された地点に対応するノードである終点ノードまでのエッジの重みの和が最も小さくなるようなノード列を導出することで、予定経路を決定する。上記の制御装置に係る重み付きグラフにおいて、1以上のエッジのそれぞれの重みは、例えば、各エッジが結合する2個のノードのそれぞれに対応する2個の地点のそれぞれの参照画像が類似する度合いを示す。
【0006】
上記の何れかの制御装置において、推定モデルは、目標画像及び現在画像を入力とし、目標画像の特徴量及び現在画像の特徴量を抽出する特徴量抽出部を有してよい。上記の何れかの制御装置において、推定モデルは、目標画像の特徴量及び現在画像の特徴量を入力とし、相対指標に関する推定結果を出力する相対指標推定部を有してよい。
【0007】
上記の何れかの制御装置において、特徴量抽出部は、目標画像を入力し、目標画像の特徴量を抽出する第1抽出部を含んでよい。上記の何れかの制御装置において、特徴量抽出部は、現在画像を入力し、現在画像の特徴量を抽出する第2抽出部を含んでよい。上記の何れかの制御装置において、第1抽出部は、(i)目標画像を学習済みの第1抽出モデルに入力し、(ii)第1抽出モデルから、目標画像の特徴量に関する推定結果に対応する出力を導出してよい。上記の何れかの制御装置において、第2抽出部は、(i)現在画像を学習済みの第2抽出モデルに入力し、(ii)第2抽出モデルから、現在画像の特徴量に関する推定結果に対応する出力を導出してよい。上記の何れかの制御装置において、第1抽出モデル及び第2抽出モデルは、画像を入力とし、当該画像の特徴ベクトルを出力とする距離学習により生成された学習済みモデルであってよい。
【0008】
上記の何れかの制御装置は、複数の第1学習用データを含む第1学習用データセットを取得する第1データセット取得部を備えてよい。上記の何れかの制御装置は、第1学習用データセットに含まれる2個の第1学習用データの組み合わせを用いて機械学習を実行することにより、学習済みの推定モデルを生成する推定モデル生成部を備えてよい。上記の何れかの制御装置において、第1学習用データのそれぞれは、画像と、当該画像を撮像した第2撮像装置の位置である撮像位置と、第2撮像装置の姿勢である撮像姿勢とが対応付けられたデータであってよい。上記の何れかの制御装置において、推定モデル生成部は、複数の組み合わせのそれぞれについて、2個の第1学習用データの一方に含まれる第1画像と、2個の第1学習用データの他方に含まれる第2画像とを入力とし、第1画像に対応する撮像位置及び撮像姿勢と、第2画像に対応する撮像位置及び撮像姿勢との間の相対的な関係の推定結果に関する値を出力とする機械学習により、推定モデルを生成してよい。
【0009】
上記の何れかの制御装置は、相対指標導出部が導出した相対指標に基づいて移動体を移動させる移動制御部を備えてよい。上記の何れかの制御装置は、パーティクルフィルタ又は逐次モンテカルロ法により移動体の現在位置を推定し、当該推定された現在位置に基づいて相対指標の値を補正する補正部を備えてよい。上記の何れかの制御装置において、移動制御部は、補正部が補正した相対指標の値に基づいて移動体を移動させてよい。
【0010】
上記の何れかの制御装置は、出発地点において第1撮像装置が撮像した画像である出発地画像を取得する出発地画像取得部を備えてよい。上記の何れかの制御装置は、複数の参照画像のそれぞれが出発地画像に類似する度合いを導出する類似度導出部を備えてよい。上記の何れかの制御装置は、出発地画像に最も類似する参照画像に対応するノードを、始点ノードとして決定する始点ノード決定部を備えてよい。上記の何れかの制御装置は、ユーザからの入力に基づいて、終点ノードを決定する終点ノード決定部を備えてよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
学校法人明治大学
2型免疫の抑制剤
1か月前
学校法人明治大学
化合物及び有機半導体材料
15日前
ミサワホーム株式会社
建物躯体構造
3日前
学校法人明治大学
アスパラガスの栽培方法および該栽培方法に用いられる液状マルチ剤
6日前
株式会社ダイフク
搬送設備
14日前
トヨタ自動車株式会社
ペダル機構
13日前
三菱電機株式会社
自己位置推定装置
23日前
株式会社やまびこ
走行制御装置
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
21日前
株式会社タブチ
減圧弁
1か月前
株式会社計数技研
移動体、及びプログラム
14日前
WHILL株式会社
電動モビリティ
22日前
株式会社ダイヘン
搬送車
21日前
ローム株式会社
半導体装置
2日前
日本信号株式会社
自走式装置
28日前
株式会社ダイヘン
移動体、及び誘導線検出装置
6日前
株式会社デンソー
診断装置
1か月前
井関農機株式会社
作業車両
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
6日前
株式会社アイシン
自律移動体
28日前
株式会社アイシン
自律移動体
28日前
株式会社アイシン
自律移動体
28日前
株式会社アイシン
自律移動体
28日前
FCLコンポーネント株式会社
電源回路および検出装置
1か月前
三菱電機株式会社
状態推定装置及び移動体制御装置
24日前
株式会社東海理化電機製作所
ペダル装置
9日前
オークラ輸送機株式会社
走行車および自律走行方法
2日前
株式会社ダイヘン
情報処理装置
21日前
横河電機株式会社
電流出力装置
15日前
ファナック株式会社
機械プログラミング方法
1か月前
株式会社マキタ
作業ロボット
1か月前
株式会社東海理化電機製作所
ペダル装置
9日前
株式会社東海理化電機製作所
ペダル装置
9日前
ファナック株式会社
工作機械の迅速な移動計画
1か月前
個人
自動搬送車
22日前
オークラ輸送機株式会社
走行車および走行車システム
2日前
続きを見る
他の特許を見る











 特許ウォッチ
特許ウォッチ