TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024165754
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023082235
出願日
2023-05-18
発明の名称
作業機
出願人
株式会社マキタ
代理人
弁理士法人 快友国際特許事務所
主分類
B25F
5/00 20060101AFI20241121BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】異物がハウジングの内部に侵入することを抑制することが可能な技術を提供する。
【解決手段】作業機は、作業部と、作業部を動作させる原動機と、作業部を保持するとともに、原動機を収容するハウジングと、ハウジングに形成された貫通孔を介してハウジングの内部と外部に跨っており、ユーザによって操作されるトリガレバーと、ハウジングの内部に配置されており、トリガレバーのうちハウジングの内部に存在する部分の動きを検出するセンサと、センサでの検出結果に応じて原動機を制御する制御部と、を備える。トリガレバーは、ハウジングに対して、回転シャフトを介して回転可能に支持される。トリガレバーは、トリガレバーの回転軸を中心とした回転体形状を有する遮蔽部を備える。貫通孔の周縁部は、遮蔽部の外周面と対向する対向縁部を含む。
【選択図】図6
特許請求の範囲
【請求項1】
作業部と、
前記作業部を動作させる原動機と、
前記作業部を保持するとともに、前記原動機を収容するハウジングと、
前記ハウジングに形成された貫通孔を介して前記ハウジングの内部と外部に跨っており、ユーザによって操作されるトリガレバーと、
前記ハウジングの内部に配置されており、前記トリガレバーのうち前記ハウジングの内部に存在する部分の動きを検出するセンサと、
前記センサでの検出結果に応じて前記原動機を制御する制御部と、を備えており、
前記トリガレバーは、前記ハウジングに対して、回転シャフトを介して回転可能に支持されており、
前記トリガレバーは、前記トリガレバーの回転軸を中心とした回転体形状を有する遮蔽部を備えており、
前記貫通孔の周縁部は、前記遮蔽部の外周面と対向する対向縁部を含む、作業機。
続きを表示(約 1,000 文字)
【請求項2】
前記遮蔽部は、前記貫通孔の略全体を塞ぐように配置されており、
前記トリガレバーは、
前記遮蔽部から延びており、前記ハウジングの外部に配置されており、前記ユーザによって操作される操作部と、
前記遮蔽部から延びており、前記ハウジングの内部に配置されており、前記センサによって検出される検出部と、をさらに備えており、
前記操作部は、棒形状を有する、請求項1の作業機。
【請求項3】
前記貫通孔は、前記貫通孔が設けられている箇所から前記作業部に向かう方向に対して、略反対方向に開口している、請求項1または2の作業機。
【請求項4】
前記センサは、磁気センサおよびマイクロスイッチのうち少なくとも一つを含む、請求項1から3の何れか一項の作業機。
【請求項5】
前記ハウジングに対する前記トリガレバーの回転移動は、所定の可動範囲内に制限されており、
前記トリガレバーが前記可動範囲の一端から他端まで回転する場合の前記トリガレバーの回転角度は、45度未満である、請求項1から4の何れか一項の作業機。
【請求項6】
前記遮蔽部は、前記貫通孔の略全体を塞ぐように配置されており、
前記トリガレバーは、
前記遮蔽部から延びており、前記ハウジングの外部に配置されており、前記ユーザによって操作される操作部と、
前記遮蔽部から延びており、前記ハウジングの内部に配置されており、前記センサによって検出される検出部と、をさらに備えており、
前記操作部は、棒形状を有しており、
前記ハウジングに対する前記トリガレバーの回転移動は、所定の可動範囲内に制限されており、
前記遮蔽部の外周部分のうち、前記トリガレバーが前記可動範囲の一端から他端まで回転する過程で前記貫通孔を介して前記ハウジングの外部に露出する部分を露出部とした時、
前記回転軸の周方向において前記露出部が存在する角度範囲は、90度以上である、請求項1から5の何れか一項の作業機。
【請求項7】
前記作業部は、被切断物を切断する切断作業、または、被切削物を切削する切削作業を実行するように構成されている、請求項1から6の何れか一項の作業機。
【請求項8】
前記ユーザが片手で持ち運び可能なハンディタイプの作業機である、請求項1から7の何れか一項の作業機。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、作業機に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
特許文献1には、作業部と、前記作業部を動作させる原動機と、前記作業部を保持するとともに、前記原動機を収容するハウジングと、ユーザによって操作されるトリガレバーと、前記ハウジングの内部に配置されるセンサと、前記センサでの検出結果に応じて前記原動機を制御する制御部と、を備える作業機が開示される。前記トリガレバーは、全体が前記ハウジングの外部に配置される。前記センサは、前記ハウジングの外部に存在する前記トリガレバーの動きを検出するように構成されている。
【先行技術文献】
【特許文献】
【0003】
米国出願公開第2016/0219793号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の作業機は、センサとトリガレバーの間がハウジングによって遮られているので、センサによるトリガレバーの検出精度に劣る可能性がある。これを改善する構成として、ハウジングに貫通孔を設け、当該貫通孔を介してトリガレバーをハウジングの内部と外部に跨らせ、トリガレバーのうちハウジングの内部に存在する部分の動きをセンサに検出させることが考えられる。ただしこの構成では、貫通孔の周縁部とトリガレバーの間に設けられる隙間を介して、塵などの異物がハウジングの内部に侵入するおそれがある。本明細書では、異物がハウジングの内部に侵入することを抑制することが可能な技術を提供する。
【課題を解決するための手段】
【0005】
本明細書が開示する作業機は、作業部と、前記作業部を動作させる原動機と、前記作業部を保持するとともに、前記原動機を収容するハウジングと、前記ハウジングに形成された貫通孔を介して前記ハウジングの内部と外部に跨っており、ユーザによって操作されるトリガレバーと、前記ハウジングの内部に配置されており、前記トリガレバーのうち前記ハウジングの内部に存在する部分の動きを検出するセンサと、前記センサでの検出結果に応じて前記原動機を制御する制御部と、を備える。前記トリガレバーは、前記ハウジングに対して、回転シャフトを介して回転可能に支持される。前記トリガレバーは、前記トリガレバーの回転軸を中心とした回転体形状を有する遮蔽部を備える。前記貫通孔の周縁部は、前記遮蔽部の外周面と対向する対向縁部を含む。
【0006】
トリガレバーはハウジングに対して様々な姿勢を取り得る。トリガレバーの姿勢に依っては、貫通孔の周縁部とトリガレバーの間に設けられる隙間が拡大してしまうことも予想される。仮に貫通孔の周縁部とトリガレバーの間に設けられる隙間が拡大すると、異物がハウジングの内部に侵入しやすくなってしまう。上記の構成によれば、遮蔽部がトリガレバーの回転軸を中心とした回転体形状を有するので、トリガレバーが回転しても、遮蔽部の外周面と対向縁部の間の距離は一定に維持される。このため、貫通孔の周縁部とトリガレバーの間に設けられる隙間のうち、少なくとも遮蔽部の外周面と対向縁部の間に設けられる隙間については、トリガレバーの姿勢に依らず、狭い状態を保つことができる。従って、異物がハウジングの内部に侵入することを抑制できる。
【図面の簡単な説明】
【0007】
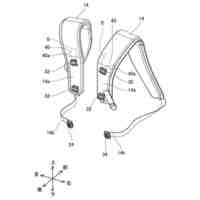
実施例に係る剪定ハサミ2を、前方右方上方から見た斜視図である。
実施例に係る剪定ハサミ2の作業部12の近傍の構成を示す分解図である。
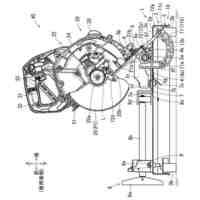
実施例に係る剪定ハサミ2の可動刃8が開位置にある場合の、剪定ハサミ2の内部構造を、右方から見た図である。
実施例に係る剪定ハサミ2のハウジング4に設けられたトリガ貫通孔100を、後方右方下方から見た図である。
実施例に係る剪定ハサミ2のトリガレバー10の近傍の構成を示す図である。
実施例に係る剪定ハサミ2の、ゼロ位置にあるトリガレバー10を、右方から見た図である。
実施例に係る剪定ハサミ2の、最大引き上げ位置にあるトリガレバー10を、右方から見た図である。
実施例に係る剪定ハサミ2の、センサ基板90の近傍の構成を示す図である。
実施例に係る剪定ハサミ2の可動刃8が閉位置にある場合の、剪定ハサミ2の内部構造を右方から見た図である。
【発明を実施するための形態】
【0008】
本発明の代表的かつ非限定的な具体例について、図面を参照して以下に詳細に説明する。この詳細な説明は、本発明の好ましい例を実施するための詳細を当業者に示すことを単純に意図しており、本発明の範囲を限定することを意図したものではない。また、開示された追加的な特徴ならびに発明は、さらに改善された作業機を提供するために、他の特徴や発明とは別に、又は共に用いることができる。
【0009】
また、以下の詳細な説明で開示される特徴や工程の組み合わせは、最も広い意味において本発明を実施する際に必須のものではなく、特に本発明の代表的な具体例を説明するためにのみ記載されるものである。さらに、以下の代表的な具体例の様々な特徴、ならびに、特許請求の範囲に記載されるものの様々な特徴は、本発明の追加的かつ有用な実施形態を提供するにあたって、ここに記載される具体例のとおりに、あるいは列挙された順番のとおりに組合せなければならないものではない。
【0010】
本明細書及び/又は特許請求の範囲に記載された全ての特徴は、実施例及び/又は特許請求の範囲に記載された特徴の構成とは別に、出願当初の開示ならびに特許請求の範囲に記載された特定事項に対する限定として、個別に、かつ互いに独立して開示されることを意図するものである。さらに、全ての数値範囲及びグループ又は集団に関する記載は、出願当初の開示ならびに特許請求の範囲に記載された特定事項に対する限定として、それらの中間の構成を開示する意図を持ってなされている。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
作業機
7日前
株式会社マキタ
打撃工具
今日
株式会社マキタ
電動工具
今日
株式会社マキタ
電動工具
21日前
株式会社マキタ
打撃工具
27日前
株式会社マキタ
電動工具
27日前
株式会社マキタ
電動作業機
27日前
株式会社マキタ
ハンマドリル
今日
株式会社マキタ
背負ユニット
1か月前
株式会社マキタ
電動工具システム
1日前
株式会社マキタ
ハンマ用作業カート
28日前
株式会社マキタ
金工用定置式切断機
28日前
株式会社マキタ
携帯用切断機用スタンドおよび定置式切断機
27日前
個人
木製ハンマー
3か月前
個人
関節モジュール
3か月前
個人
寸切りボルト回し
3か月前
個人
スロットルトリガー
3か月前
日東精工株式会社
搬送装置
7か月前
中国電力株式会社
腰袋
6か月前
コクヨ株式会社
補助器具
2か月前
太陽工業株式会社
チャック装置
2か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
衝撃工具
5か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
株式会社右川ゴム製造所
把持装置
8か月前
川崎重工業株式会社
ロボット
7日前
個人
メンテナンス用スタンド
4か月前
東京計器株式会社
接触検知装置
4か月前
オムロン株式会社
電動把持工具
2か月前
川崎重工業株式会社
罫書用治具
5か月前
株式会社マキタ
打撃工具
今日
トヨタ自動車株式会社
ロボット
4か月前
株式会社マキタ
動力工具
6か月前
学校法人立命館
グリッパ
3か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ