TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024163915
公報種別
公開特許公報(A)
公開日
2024-11-25
出願番号
2021163336
出願日
2021-10-04
発明の名称
撮像装置、制御方法、プログラム
出願人
ソニーグループ株式会社
代理人
個人
,
個人
主分類
H04N
23/67 20230101AFI20241118BHJP(電気通信技術)
要約
【課題】マニュアルフォーカス状態からトラッキングオートフォーカスに円滑に遷移できるようにする。
【解決手段】 撮像装置が、手動操作に基づくフォーカスレンズ駆動が行われるマニュアルフォーカス状態でトリガ検出を行い、トリガの検出に基づいてトラッキングオートフォーカス処理を開始するフォーカス制御部を備えるようにする。
【選択図】図5
特許請求の範囲
【請求項1】
手動操作に基づくフォーカスレンズ駆動が行われるマニュアルフォーカス状態でトリガを検出する処理であるトリガ検出を行い、前記トリガ検出の結果に基づいてトラッキングオートフォーカス処理を開始する制御部を備える
撮像装置。
続きを表示(約 590 文字)
【請求項2】
前記トリガは、撮像画像を表示する画面内で位置を指定するユーザ操作である
請求項1に記載の撮像装置。
【請求項3】
前記トリガは、ユーザによる特定の操作子の操作である
請求項1に記載の撮像装置。
【請求項4】
前記トリガは、撮像画像に対する物体検出処理に基づいて発生される
請求項1に記載の撮像装置。
【請求項5】
前記トリガは、センシング情報に基づいて発生される
請求項1に記載の撮像装置。
【請求項6】
前記センシング情報は、被写体に対する奥行情報である
請求項5に記載の撮像装置。
【請求項7】
前記トリガは、撮像画像の画像平面内の領域としての面内範囲の設定に基づいて発生される
請求項1に記載の撮像装置。
【請求項8】
前記制御部は、前記面内範囲の提示制御を行う
請求項7に記載の撮像装置。
【請求項9】
前記トリガは、被写体までの距離についての範囲である奥行範囲の設定に基づいて発生される
請求項1に記載の撮像装置。
【請求項10】
前記制御部は、前記奥行範囲の提示制御を行う
請求項9に記載の撮像装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本技術は撮像装置、撮像装置の制御方法、プログラムに関し、特にフォーカス制御の技術に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
例えば特許文献1に記載されるように、撮像装置には、自動的なフォーカス制御としてオートフォーカス機能(以下、オートフォーカス(Auto Focus)を「AF」と記載する場合がある)が用意されるとともに、手動操作によるマニュアルフォーカス機能(以下、マニュアルフォーカス(Manual Focus)を「MF」と記載する場合がある)が用意されているものがある。
【先行技術文献】
【特許文献】
【0003】
特開2008-262049号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような撮像装置では、ユーザの多様な撮影機会に応じて、AF制御とMF動作を連動させ、適切なフォーカス制御を行うことが望ましい。例えばユーザ操作によるMFでフォーカス動作を行っている状態(以下、MF状態ともいう)から、複雑な操作を経ずに、適切なターゲットに対してトラッキングAFが実行できるようにすることが望まれる。
そこで本開示では、MF状態からユーザの意図に沿ったトラッキングAFが簡易に実現できるようにする技術を提案する。
【課題を解決するための手段】
【0005】
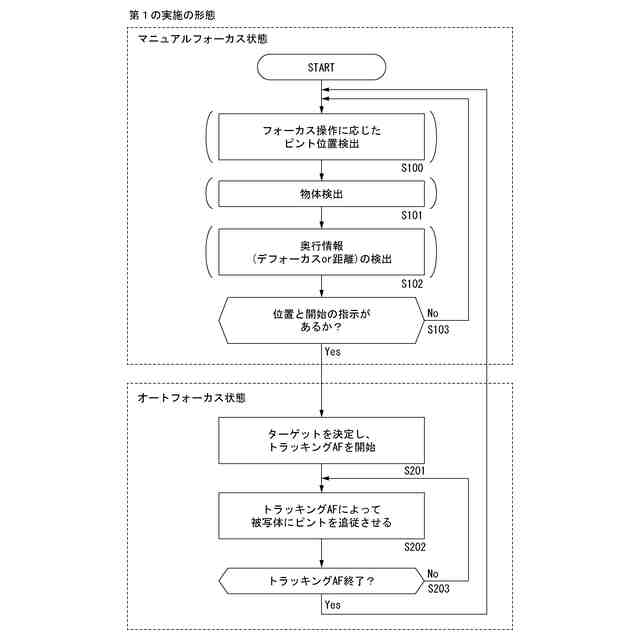
本技術に係る撮像装置は、手動操作に基づくフォーカスレンズ駆動が行われるマニュアルフォーカス状態でトリガを検出する処理であるトリガ検出を行い、前記トリガ検出の結果に基づいてトラッキングオートフォーカス処理を開始する制御部を備える。
マニュアルフォーカス状態で所定のトリガを検出することに応じて、トラッキングオートフォーカスを発動させる。
【図面の簡単な説明】
【0006】
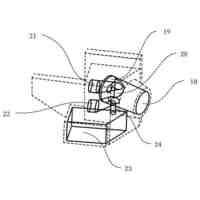
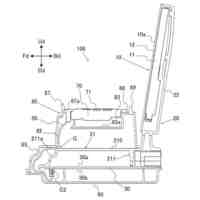
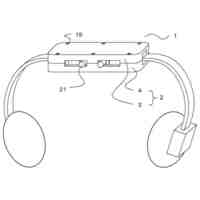
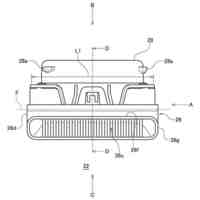
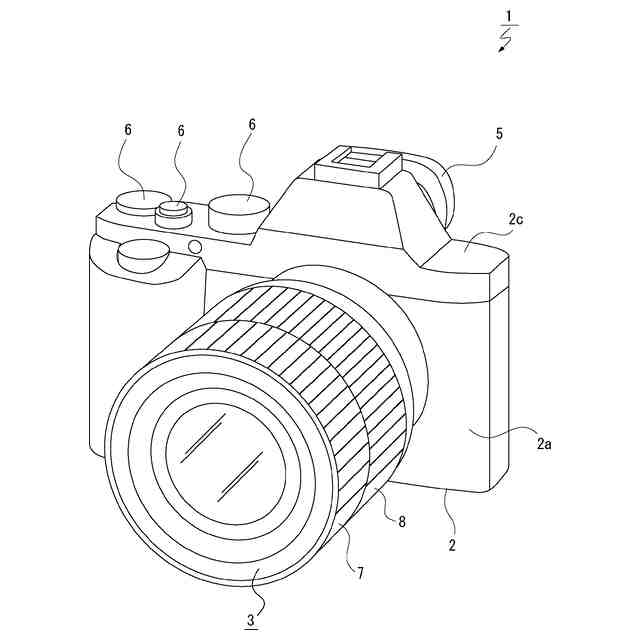
本技術の実施の形態の撮像装置の斜視図である。
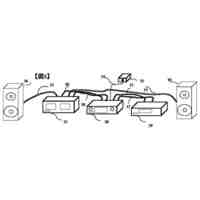
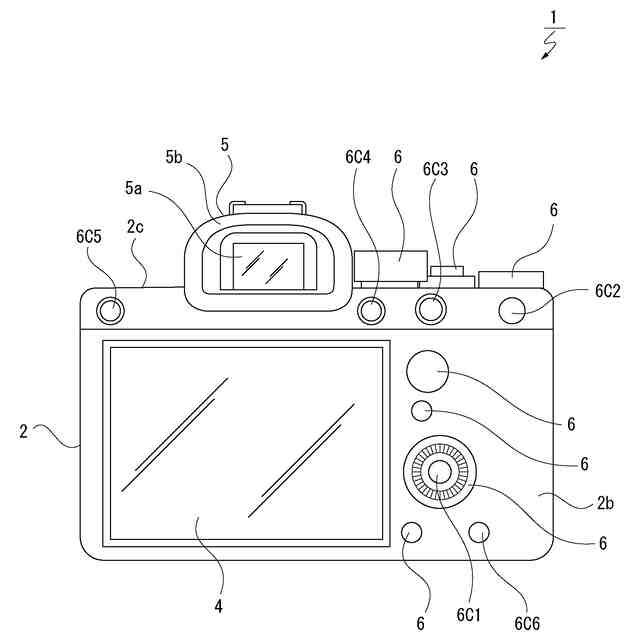
実施の形態の撮像装置の背面図である。
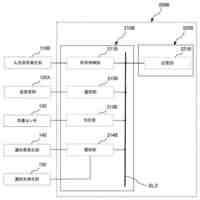
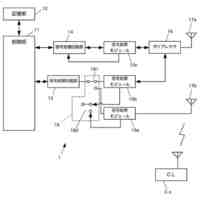
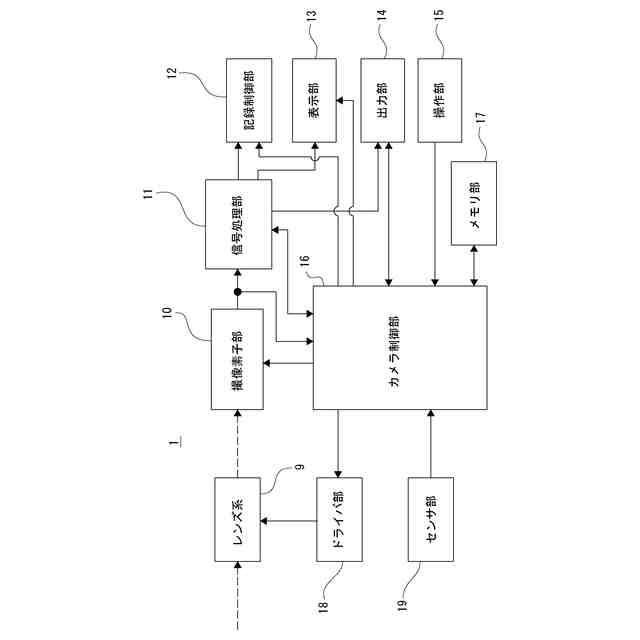
実施の形態の撮像装置のブロック図である。
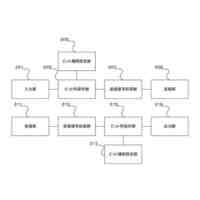
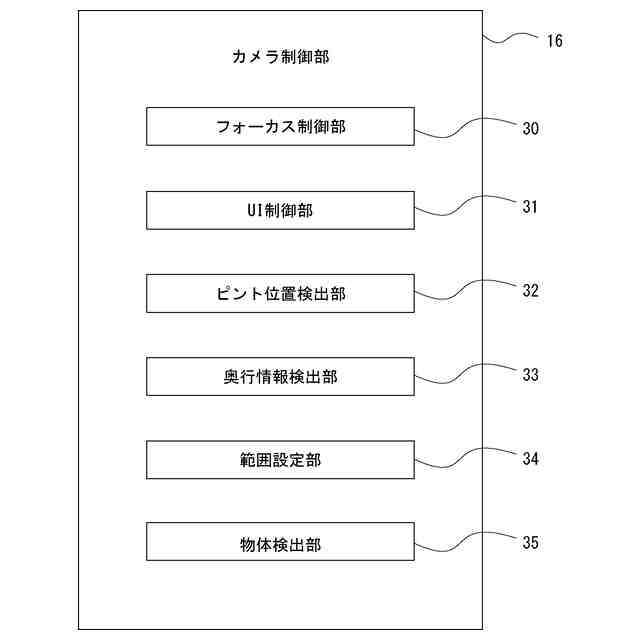
実施の形態の撮像装置の機能構成例の説明図である。
第1の実施の形態の処理のフローチャートである。
実施の形態のデフォーカス情報又は距離情報の検出の説明図である。
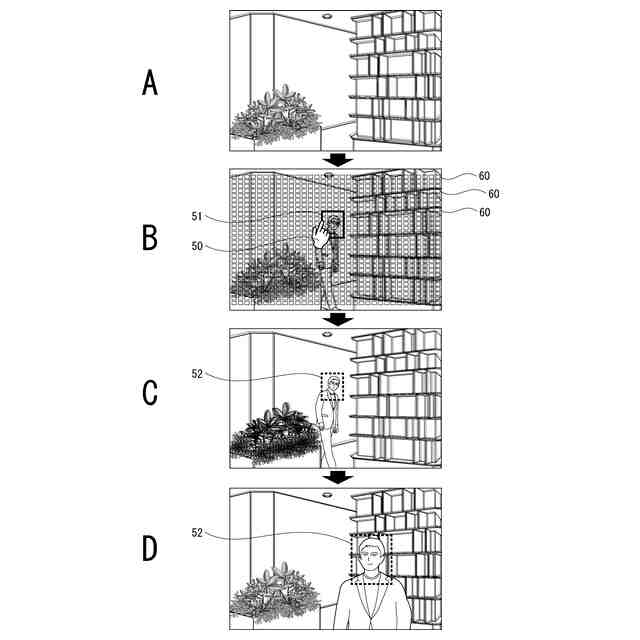
第1の実施の形態による動作状態遷移の説明図である。
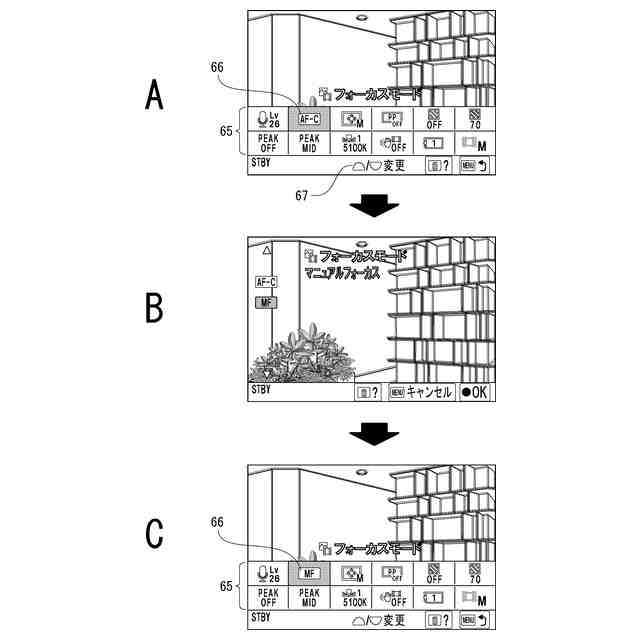
第1の実施の形態のモード設定の説明図である。
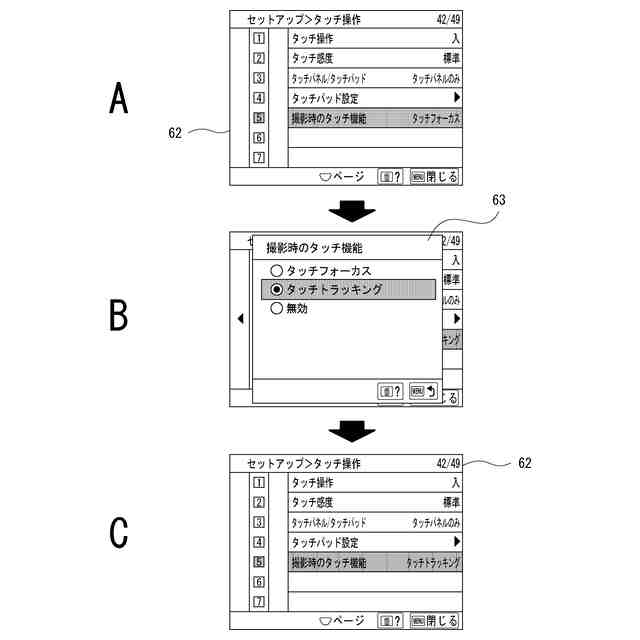
第1の実施の形態のタッチ操作の設定の説明図である。
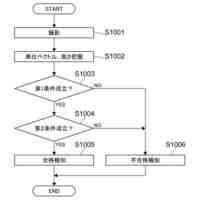
第2の実施の形態の処理のフローチャートである。
第2の実施の形態による動作状態遷移の説明図である。
第2の実施の形態のキーアサインの説明図である。
第3の実施の形態の処理のフローチャートである。
第3の実施の形態による動作状態遷移の説明図である。
セマンティックセグメンテーションによる物体検出の説明図である。
第4の実施の形態の処理のフローチャートである。
第4の実施の形態による動作状態遷移の説明図である。
第4の実施の形態におけるカラーマップの説明図である。
第5の実施の形態の処理のフローチャートである。
第5の実施の形態による動作状態遷移の説明図である。
【発明を実施するための形態】
【0007】
以下、実施の形態を次の順序で説明する。
<1.撮像装置の構成>
<2.撮像装置の機能構成>
<3.第1の実施の形態>
<4.第2の実施の形態>
<5.第3の実施の形態>
<6.第4の実施の形態>
<7.第5の実施の形態>
<8.まとめ及び変形例>
【0008】
本開示で用いるいくつかの語句について説明しておく。
「画像」は動画及び静止画を含む用語として用いる。表示される画像としての意味だけでなく、画像データとしての意味も含むものとする。
「撮像」とは、イメージセンサの光電変換に基づいて画像データを生成することを指す。
「撮像画像」は、イメージセンサの光電変換を経て得られた撮像された画像のことであり、動画や静止画として記録される画像や、スルー画等としてモニタ表示される画像を含む。
「被写体」とは、撮像画像に含まれる全ての被写体を指す。
「物体検出処理」とは、画像内で特定の被写体の種別を検出する処理の総称とする。
「検出物体」は被写体のうちで物体検出処理により検出された物体である。例えば被写体のうちで、顔、人、瞳、動物、特定物として検出された画像や、検出された被写体自体を指す用語とする。
「トラッキングオートフォーカス(トラッキングAF)」は、ターゲットとした被写体に対して自動的に追尾するようにするフォーカス動作である。
【0009】
<1.撮像装置の構成>
本実施の形態に係る撮像装置1の外観を図1及び図2に示す。
なお撮像装置1は、交換式のレンズを備えたカメラの例としているが、これに限られることなく、レンズ一体型のカメラであってもよい。また本開示の技術は、スチルカメラやビデオカメラや他の機器に組み込まれる各種の撮像装置に広く適用することができる。
【0010】
撮像装置1は、内外に所要の各部が配置されるカメラ筐体2と、カメラ筐体2の前面部2aに取り付けられたレンズ鏡筒3とを備えて構成されている。
カメラ筐体2の後面部2bには、背面モニタ4が配置されている。背面モニタ4には、スルー画や記録画像などが表示される。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
挿耳装置
1か月前
個人
仮想アース
1か月前
個人
環境音制御方法
今日
個人
車両の制御装置
1か月前
日本無線株式会社
秘匿通信
今日
日本精機株式会社
表示装置
今日
個人
押しボタン式側圧調整器
7日前
個人
投げ銭管理システム
1か月前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
撮像装置
1か月前
太陽誘電株式会社
超音波装置
1か月前
パイオニア株式会社
音響装置
1か月前
個人
平面映像の回転による立体映像
1か月前
17LIVE株式会社
サーバ
22日前
キヤノン電子株式会社
画像読取装置
20日前
ブラザー工業株式会社
読取装置
1か月前
キヤノン株式会社
画像読取装置
1か月前
キヤノン株式会社
無線通信装置
1か月前
個人
テレビ画面の立体画像の表示方法
今日
キヤノン電子株式会社
シート搬送装置
20日前
株式会社クボタ
作業車両
20日前
ブラザー工業株式会社
印刷装置
1か月前
ブラザー工業株式会社
利用管理システム
1か月前
日本セラミック株式会社
超音波送受信器
7日前
株式会社ACSL
確認方法
1か月前
シャープ株式会社
表示装置
29日前
アイホン株式会社
インターホン機器
1か月前
株式会社小糸製作所
音発生ユニット
1か月前
スズキ株式会社
車両用撮影システム
20日前
株式会社ミチヒロ
SoTモジュール
今日
リオン株式会社
マイクロホン
7日前
株式会社バッファロー
無線通信装置
1か月前
TOA株式会社
IP放送の停止、切替制御
1か月前
株式会社ニコン
撮像装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ