TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024158273
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023073342
出願日
2023-04-27
発明の名称
プログラム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G08G
1/09 20060101AFI20241031BHJP(信号)
要約
【課題】遠隔操作デバイスの操作者が車両の状態を直観的に認識できる。
【解決手段】車両(1)の位置および車両(1)の進行方向に関する情報と、車両(1)の自動運転を遠隔操作する遠隔操作デバイス(25)の位置に関する情報を取得する。遠隔操作デバイス(25)の表示画面(24)上に、上方から見たときの車両(1)の形状を表す車両画像を表示し、その際、車両画像を、上述の情報に基づいて、遠隔操作デバイス(25)の位置から車両(1)を見たときの車両画像として表示させる。
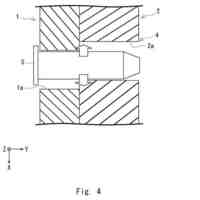
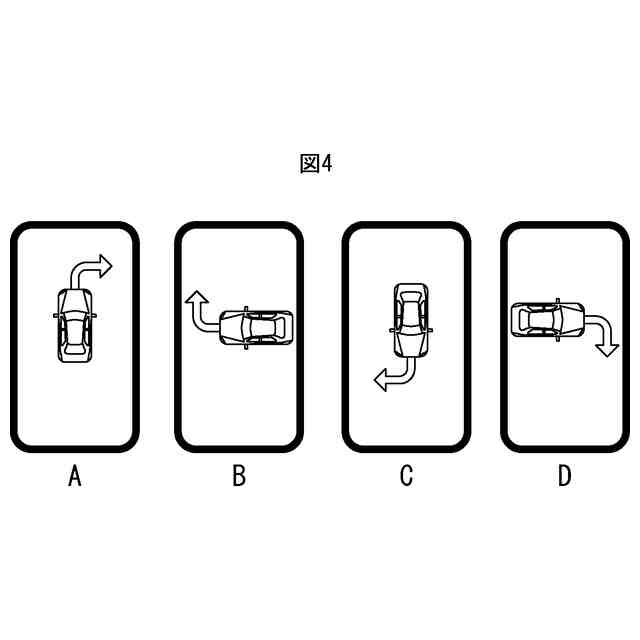
【選択図】図4
特許請求の範囲
【請求項1】
車両の位置および車両の進行方向に関する情報と、車両の自動運転を遠隔操作する遠隔操作デバイスの位置に関する情報を取得し、該遠隔操作デバイスの表示画面上に、上方から見たときの該車両の形状を表す車両画像を表示し、その際、該車両画像を、上記情報に基づいて、遠隔操作デバイスの位置から車両を見たときの車両画像として表示させるよう、コンピュータに機能させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明はプログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
携帯電話端末による遠隔操作により車両を駐車させる遠隔駐車システムにおいて、車両駐車動作中における車両と目標駐車スペースと周辺障害物との位置関係をリアルタイムに検出し、これら車両と目標駐車スペースと周辺障害物との平面上にける位置関係を携帯電話端末の表示画面上にリアルタイムに表示するようにした遠隔駐車システムが公知である(例えば特許文献1を参照)。この携帯電話端末の表示画面上には、車両の駐車動作中、車両が表示画面の中央部に位置固定されていて車両周りの目標駐車スペースと周辺障害物がリアルタイムで移動するように表示される。
【先行技術文献】
【特許文献】
【0003】
中国特許出願公開第111754809号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、このように表示画面の中央部に車両が位置固定されていると、携帯電話端末の操作者が目視している車両の向き、例えば、車両の進行方向と、表示画面上における車両の向き、例えば、車両の進行方向とが異なっている場合には、車両の状態、例えば、車両がどちらの方向に進行しているかを直観的に認識するのが困難であるという問題がある。
【課題を解決するための手段】
【0005】
このような問題を解決するために、本発明によれば、車両の位置および車両の進行方向に関する情報と、車両の自動運転を遠隔操作する遠隔操作デバイスの位置に関する情報を取得し、遠隔操作デバイスの表示画面上に、上方から見たときの車両の形状を表す車両画像を表示し、その際、この車両画像を、上述の情報に基づいて、遠隔操作デバイスの位置から車両を見たときの車両画像として表示させるよう、コンピュータに機能させるプログラムが提供される。
【発明の効果】
【0006】
車両の状態を直観的に認識することができる。
【図面の簡単な説明】
【0007】
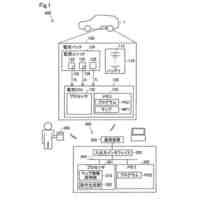
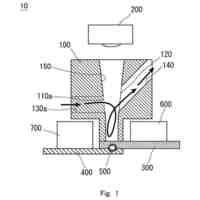
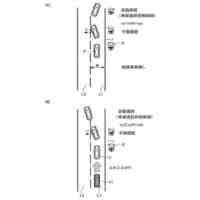
図1は、車両の駐車スペースからの出庫処理を図解的に示す図である。
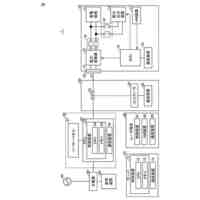
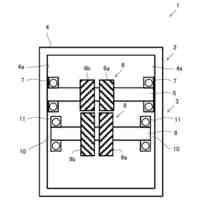
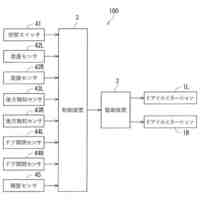
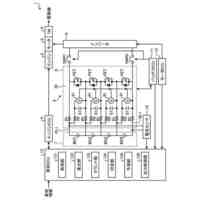
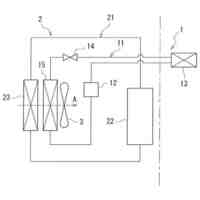
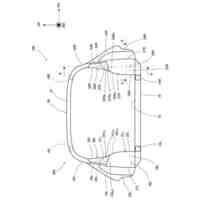
図2は、車両の構成を示す図である。
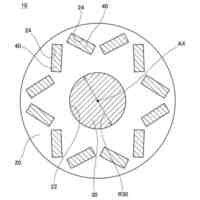
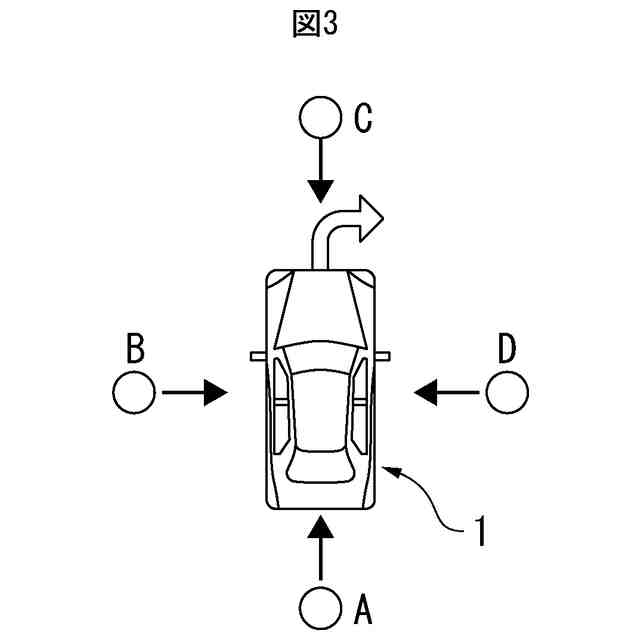
図3は、上方から見たときの車両の形状を示す図である。
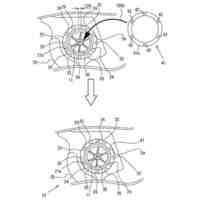
図4は、携帯端末の表示画面上に表示される車両の画像を示す図である。
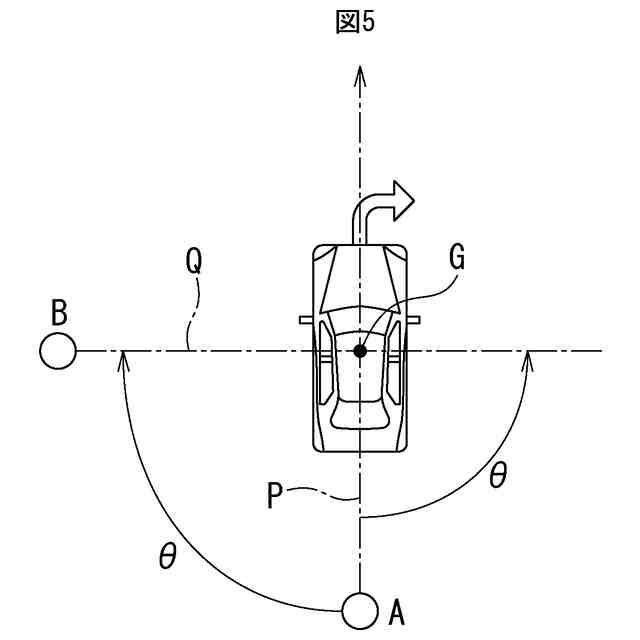
図5は、携帯端末の表示画面上に表示される車両の画像の変化を説明するための図である。
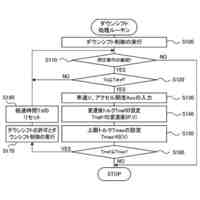
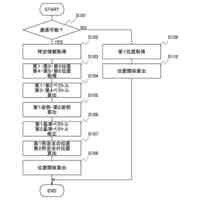
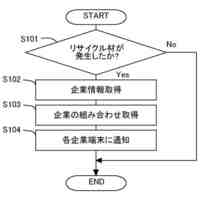
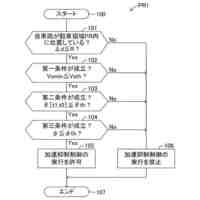
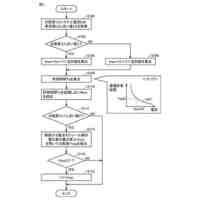
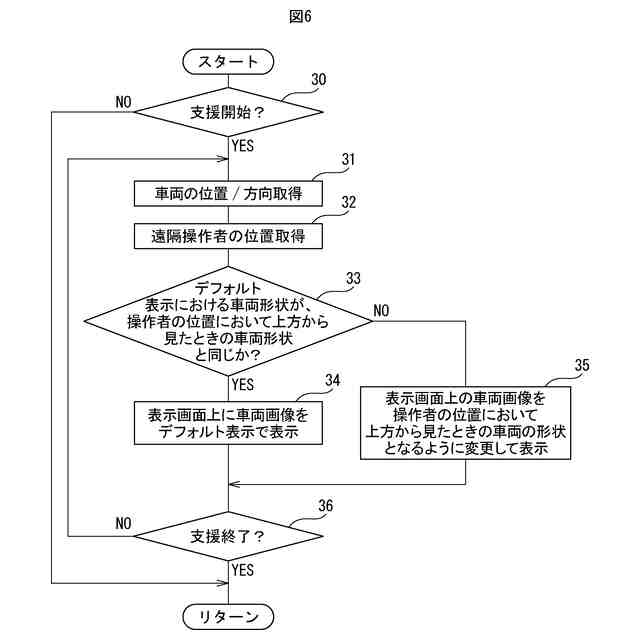
図6は、携帯端末の表示画面上に表示される車両画像等を調整するためのフローチャートである。
【発明を実施するための形態】
【0008】
図1(A)および図1(B)は、車両を自動運転により駐車スペースから出庫させる出庫処理の代表的な例を示している。なお、図1(A)は、縦列駐車している多数の車両の中から或る車両1の出庫作業が行われる場合を示している。この場合、図1(A)に示される例では、車両1は駐車スペース2から出庫位置3まで矢印で示されるように左前方に自動運転により移動せしめられる。一方、図1(B)は、並列駐車している多数の車両の中から或る車両1の出庫作業が行われる場合を示している。この場合、図1(B)に示される例では、車両1が駐車スペース2から出庫位置3aまで矢印で示されるように右前方に自動運転により旋回しつつ前進せしめられるか、車両1が駐車スペース2から出庫位置3bまで矢印で示されるように左前方に自動運転により旋回しつつ前進せしめられるか、車両1が駐車スペース2から出庫位置3cまで矢印で示されるように左後方に自動運転により旋回しつつ後退せしめられるか、車両1が駐車スペース2から出庫位置3dまで矢印で示されるように右後方に自動運転により旋回しつつ後退せしめられる。
【0009】
さて、本発明は、車両1が、自動運転による車両の出庫制御を行う出庫支援システムを具備しており、出庫支援システムによる出庫支援の開始および停止を遠隔操作デバイスの遠隔操作により行えるようにし、出庫支援システムによる車両1の出庫支援を開始したときに、遠隔操作デバイスの表示画面上に、上方から見たときの車両の形状を表す車両画像を表示させるようにした場合を対象としている。このような場合において、本発明による一実施例では、遠隔操作デバイスの表示画面上において、駐車スペース2からの車両1の出庫方向を、右前方、左前方、右後方、左後方のように設定し得るように構成されている。ところが、このように遠隔操作デバイスの表示画面上において、車両1の出庫方向を、右前方、左前方、右後方、左後方のように設定し得るようにした場合には、遠隔操作デバイスの表示画面上における車両の向き、例えば、車両の進行方向と、遠隔操作デバイスの操作者が目視している車両の向き、例えば、車両の進行方向とが異なってしまうと、車両1を駐車スペース2からどちらの方向に出庫させれば、車両1を遠隔操作者の希望する方向へ出庫できるかを直観的に認識するのが困難となる。
【0010】
例えば、図1(A)に示される場合において、遠隔操作デバイスの遠隔操作者がP点に位置しているときに、遠隔操作デバイスの表示画面上の車両画像が、P点から見たときとは逆になるように、即ち、車両前方が左で車両後方が右となるように表示されていると、出庫位置3まで出庫させるのに、一瞬、出庫方向を左前方に設定してよいか戸惑うことになる。一方、図1(B)に示される場合において、例えば、遠隔操作デバイスの遠隔操作者がQ点に位置しているときに、遠隔操作デバイスの表示画面上の車両画像が、Q点から見たときとは逆になるように、即ち、車両後方が手前で車両前方が向こう側となるように表示されていると、車両1を駐車スペース2からどちらの方向に出庫させれば、車両1を遠隔操作者の希望する方向へ出庫できるかを直観的に認識し得なくなる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
方法
6日前
トヨタ自動車株式会社
電動車
7日前
トヨタ自動車株式会社
ロータ
9日前
トヨタ自動車株式会社
電動車
8日前
トヨタ自動車株式会社
駆動装置
7日前
トヨタ自動車株式会社
蓄電セル
1日前
トヨタ自動車株式会社
蓄電セル
1日前
トヨタ自動車株式会社
蓄電セル
1日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
蓄電セル
2日前
トヨタ自動車株式会社
システム
2日前
トヨタ自動車株式会社
固定方法
6日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
ドローン
7日前
トヨタ自動車株式会社
蓄電セル
8日前
トヨタ自動車株式会社
成膜装置
15日前
トヨタ自動車株式会社
制御装置
13日前
トヨタ自動車株式会社
蓄電セル
8日前
トヨタ自動車株式会社
インソール
1日前
トヨタ自動車株式会社
遠心圧縮機
7日前
トヨタ自動車株式会社
電池パック
1日前
トヨタ自動車株式会社
測位システム
6日前
トヨタ自動車株式会社
動力伝達装置
6日前
トヨタ自動車株式会社
照明システム
2日前
トヨタ自動車株式会社
バリ取り装置
7日前
トヨタ自動車株式会社
情報処理装置
2日前
トヨタ自動車株式会社
管理システム
2日前
トヨタ自動車株式会社
情報処理装置
2日前
トヨタ自動車株式会社
車両制御装置
10日前
トヨタ自動車株式会社
レーザ加工機
7日前
トヨタ自動車株式会社
劣化予測装置
2日前
トヨタ自動車株式会社
車両制御装置
13日前
トヨタ自動車株式会社
空調システム
15日前
トヨタ自動車株式会社
情報処理方法
9日前
トヨタ自動車株式会社
電池システム
16日前
トヨタ自動車株式会社
車両後部構造
1日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ