TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025039104
公報種別
公開特許公報(A)
公開日
2025-03-21
出願番号
2023145955
出願日
2023-09-08
発明の名称
車両制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
G08G
1/16 20060101AFI20250313BHJP(信号)
要約
【課題】運転者の意図に反した運転支援が運転者に提供されることに起因する運転者の不快感を低減することができる車両制御装置を提供する。
【解決手段】車両制御装置は、自車両が走行している車線L1を含む道路に関する情報、及び自車両の挙動に関する情報を取得するセンサと、前記情報に基づいて、自車両が現在走行している第一車線から、当該第一車線に隣接する第二車線へ逸脱する可能性が高いと判定した場合に、当該第二車線への自車両の逸脱を抑制するための運転支援が提供されるプロセッサと、を備え、自車両が追い越し車線を走行していることを検知し、且つ前記第一車線において自車両の後方から他車両が自車両に接近してきていることを検知した場合に、前記運転支援の提供を禁止するための処理、前記運転支援の提供を中断するための処理、又は前記運転支援を縮退させて提供するための処理を実行する。
【選択図】図2
特許請求の範囲
【請求項1】
自車両が走行している第一車線を含む道路に関する情報、及び自車両の挙動に関する情報を取得するセンサと、
前記情報に基づいて、前記第一車線から、当該第一車線に隣接する第二車線へ逸脱する可能性が高いと判定した場合に、当該第二車線への自車両の逸脱を抑制するための運転支援が自車両の運転者に提供されるように自車両を制御する処理を実行可能なプロセッサと、
を備えた車両制御装置であって、
前記センサは、自車両の周辺を走行している車両に関する情報を取得可能であり、
前記プロセッサは、前記センサから取得した各種情報に基づいて、自車両が追い越し車線を走行していることを検知し、且つ前記第一車線において自車両の後方から他車両が自車両に接近してきていることを検知した場合に、前記運転支援の提供を禁止するための処理、前記運転支援の提供を中断するための処理、又は前記運転支援を縮退させて提供するための処理を実行する、
ように構成された、車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両が現在走行している車線から逸脱する可能性が高いと判定した場合に、当該車線からの自車両の逸脱を抑制するための運転支援が自車両の運転者に提供されるように自車両を制御する車両制御装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
自車両が現在走行している車線(以下、「第一車線」と称呼する。)から逸脱する可能性が高いと判定した場合、第一車線からの自車両の逸脱を抑制するための運転支援が自車両の運転者に提供されるように自車両を制御する車両制御装置が提案されている(例えば、下記特許文献1を参照。)。この車両制御制装置(以下、「従来装置」と称呼する。)は、自車両が第一車線から逸脱する可能性が高いと判定した場合に、警報音が発生されるように警報装置を制御する。また、この種の車両制御装置として、自車両が第一車線から逸脱する可能性が高いと判定した場合に、自車両が第一車線の中央部に位置するようにステアリング装置を制御する装置(自動操舵装置)も提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2015-96377号公報
【発明の概要】
【0004】
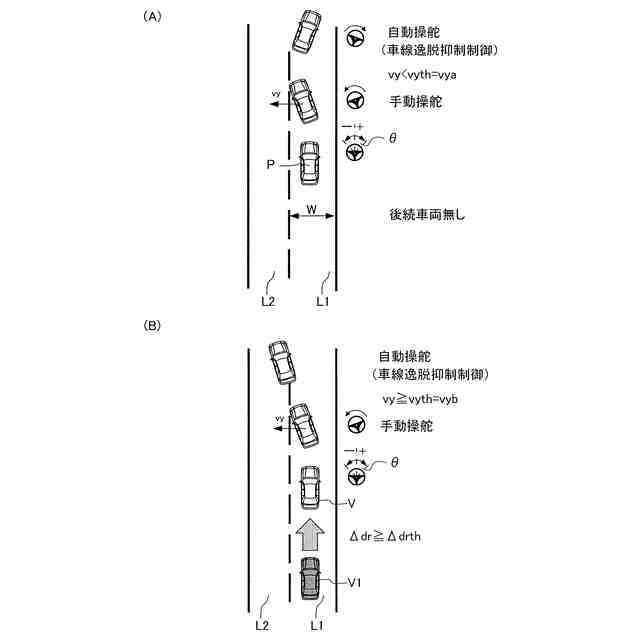
ここで、自車両が追い越し車線(第一車線)を走行している際に、自車両の後方から他車両が接近してくるシーンが想定される。このシーンにおいて、自車両の運転者が、当該他車両(後続車両)に道を譲るために、自車両を第一車線から左方(又は右方)へ逸脱させようとする場合(第一車線に隣接する第二車線へ自車両を退避させようとする場合)がある。この運転者の意図に反して、車両制御装置により上記のような運転支援(警報又は自動操舵)が提供された場合、運転者は当該運転支援を煩わしく感じる虞がある。
【0005】
本発明の目的の一つは、運転者の意図に反した運転支援が運転者に提供されることに起因する運転者の不快感を低減することができる車両制御装置を提供することにある。
【0006】
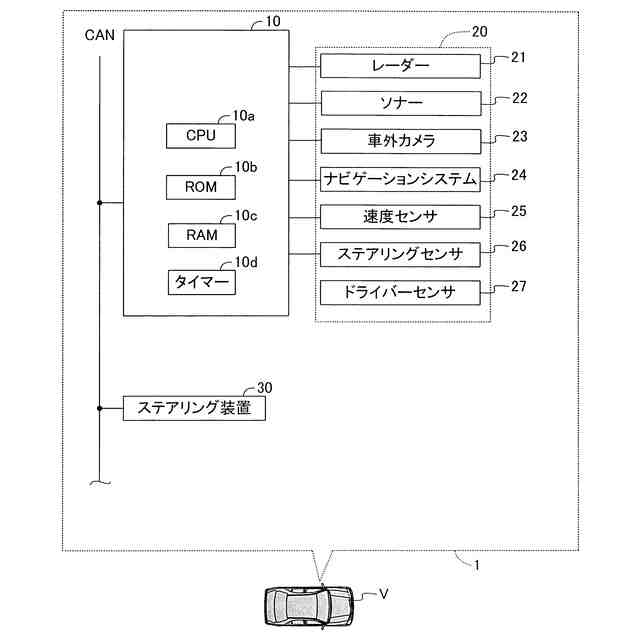
上記課題を解決するために、本発明の車両制御装置(1)は、自車両(V)が走行している第一車線(L1)を含む道路に関する情報、及び自車両の挙動に関する情報を取得するセンサ(20)と、前記情報に基づいて、前記第一車線から、当該第一車線に隣接する第二車線(L2)へ逸脱する可能性が高いと判定した場合に、当該第二車線への自車両の逸脱を抑制するための運転支援が自車両の運転者に提供されるように自車両を制御する処理を実行可能なプロセッサ(10)と、を備える。前記センサは、自車両の周辺を走行している車両(V1)に関する情報を取得可能であり、前記プロセッサは、前記センサから取得した各種情報に基づいて、自車両が追い越し車線を走行していることを検知し、且つ前記第一車線において自車両の後方から他車両が自車両に接近してきていることを検知した場合に、前記運転支援の提供を禁止するための処理、前記運転支援の提供を中断するための処理、又は前記運転支援を縮退させて提供するための処理を実行する。
【0007】
自車両が追い越し車線を走行している際、自車両の後方から他車両が接近してきた場合、自車両の運転者は、当該他車両に道を譲るために、自車両を当該追い越し車線に隣接する車線に自車両を退避させようとする可能性が高い。そこで、本発明に係る車両制御装置は、追い越し車線を走行中に後方から他車両が接近してきたシーン(以下、「特定シーン」と称呼する。)では、前記運転支援の提供を禁止又は中断可能である。また、車両制御装置は、特定シーンでは、それ以外のシーン(以下、「通常シーン」と称呼する。)に比べて、運転支援を縮退させて提供可能であってもよい。例えば、車両制御装置は、特定シーンでは、通常シーンに比べて、運転支援の提供を禁止するための条件が成立し易くなるように、当該条件の成否に係る各種パラメータ(閾値)を変更する。また、例えば、車両制御装置は、特定シーンでは、通常シーンに比べて、運転支援の提供を中断させるための条件が成立し易くなるように、当該条件の成否に係る各種パラメータ(閾値)を変更してもよい。また、例えば、車両制御装置は、特定シーンでは、通常シーンに比べて、運転支援の度合(例えば、警報音の音量、自動操舵の操舵トルクの大きさ)を軽減してもよい。上記のように構成された本発明に係る車両制御装置によれば、運転者の意図(自車両を車線から逸脱させようとする意図)に反した運転支援が運転者に提供されることに起因する運転者の不快感を低減することができる。
【図面の簡単な説明】
【0008】
図1は、本発明の一実施形態に係る車両制御装置のブロック図である。
図2は、(A)車線逸脱抑制制御が実行されるシーン及び(B)車線逸脱抑制制御が実行されないシーンを示す平面図である。
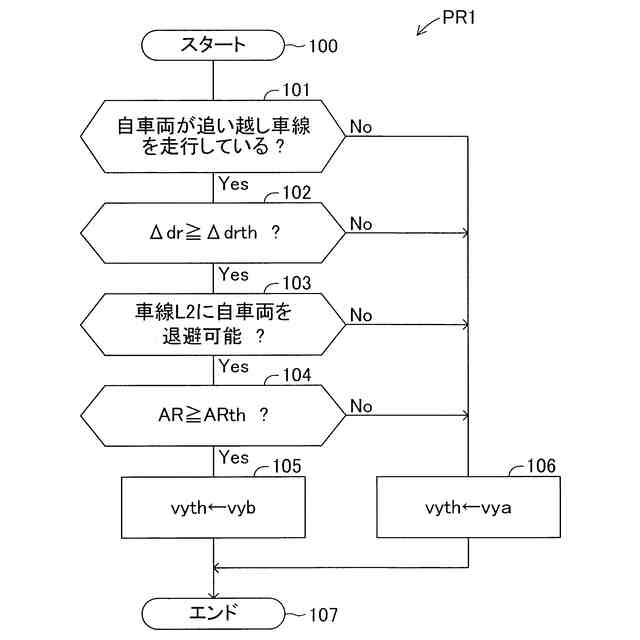
図3は、シーンに応じて運転支援を提供するか否かを決定する機能(閾値に割り当てる値を決定する機能)を実現するプログラムのフローチャートである。
【発明を実施するための形態】
【0009】
(概略) 図1に示したように、本発明の一実施形態に係る車両制御装置1(車線逸脱抑制装置)は、自動運転機能を備えた車両V(以下、「自車両」と称呼する。)に適用される。車両制御装置1は、自動運転機能が無効化されている状態(運転者が主体的に運転操作を実行している状態)において、自車両が走行している車線から逸脱することを抑制するための車線逸脱抑制制御(自動操舵)を実行する機能(車線逸脱抑制機能)を有する。
【0010】
(具体的構成) 図1に示したように、車両制御装置1は、ECU10、車載センサ20及びステアリング装置30を備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ