TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024152381
公報種別
公開特許公報(A)
公開日
2024-10-25
出願番号
2023066536
出願日
2023-04-14
発明の名称
作業機
出願人
株式会社マキタ
代理人
弁理士法人 快友国際特許事務所
主分類
B25F
5/00 20060101AFI20241018BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ユーザの意思に反して作業部が駆動されることを抑制することが可能な技術を提供する。
【解決手段】作業機は、作業部と、作業部を駆動するための原動機と、ユーザが操作するための操作機構を備える。操作機構は、ユーザが把持可能なグリップと、グリップに設けられ、作業部を駆動するためのトリガと、グリップに対して所定の方向に押し込み可能に設けられたロック部材と、ロック部材の押し込み操作に要する操作力を調整するための操作力調整機構を備える。ロック部材は、ロック部材の押し込み量が所定量未満である場合トリガをロックし、押し込み量が所定量以上である場合トリガをアンロックする。操作力調整機構は、ロック部材が押し込まれる過程において、押し込み量が所定量に達する前に操作力を第1の力まで増大させ、ロック部材が第1の力を受けてさらに押し込まれる場合操作力を第1の力よりも小さくする。
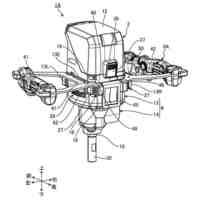
【選択図】図3
特許請求の範囲
【請求項1】
作業部と、
前記作業部を駆動するための原動機と、
ユーザが操作するための操作機構と、を備えており、
前記操作機構は、
前記ユーザが把持可能なグリップと、
前記グリップに設けられ、前記作業部を駆動するためのトリガと、
前記グリップに対して所定の方向に押し込み可能に設けられたロック部材と、
前記ロック部材の押し込み操作に要する操作力を調整するための操作力調整機構と、を備えており、
前記ロック部材は、前記ロック部材の押し込み量が所定量未満である場合、前記トリガをロックし、前記押し込み量が前記所定量以上である場合、前記トリガをアンロックし、
前記操作力調整機構は、前記ロック部材が押し込まれる過程において、前記押し込み量が前記所定量に達する前に、前記操作力を第1の力まで増大させ、
前記操作力調整機構は、前記ロック部材が前記第1の力を受けてさらに押し込まれる場合、前記操作力を前記第1の力よりも小さくする、作業機。
続きを表示(約 1,200 文字)
【請求項2】
作業部と、
前記作業部を駆動するための原動機と、
ユーザが操作するための操作機構と、を備えており、
前記操作機構は、
前記ユーザが把持可能なグリップと、
前記グリップに設けられ、前記作業部を駆動するためのトリガと、
前記グリップに対して所定の方向に押し込み可能に設けられたロック部材と、
前記ロック部材の押し込み操作に要する操作力を調整するための操作力調整機構と、を備えており、
前記ロック部材の押し込み量が所定量未満である場合、前記トリガへの操作に応じた前記作業部の駆動が禁止され、前記押し込み量が前記所定量以上である場合、前記トリガへの操作に応じた前記作業部の駆動が許容され、
前記操作力調整機構は、前記ロック部材が押し込まれる過程において、前記押し込み量が前記所定量に達する前に、前記操作力を第1の力まで増大させ、
前記操作力調整機構は、前記ロック部材が前記第1の力を受けてさらに押し込まれる場合、前記操作力を前記第1の力よりも小さくする、作業機。
【請求項3】
前記トリガは、前記ユーザが手のひらで前記ロック部材を押し込むように前記グリップを把持した時に、前記グリップを把持した手の指で操作可能な位置に配置される、請求項1または2の作業機。
【請求項4】
前記ロック部材が設けられている側から前記グリップを見た時、前記トリガは前記グリップに隠れた位置に配置される、請求項1から3の何れか一項の作業機。
【請求項5】
前記操作力調整機構は、
前記ロック部材が押し込まれる過程において、前記ロック部材に当接することにより、前記操作力を増大させるストッパ部を備えており、
前記ロック部材は、前記押し込み量が前記所定量に達するまでの間に、前記ストッパ部に当接し、前記ストッパ部を乗り越える、請求項1から4の何れか一項の作業機。
【請求項6】
前記ストッパ部には樹脂材料が用いられる、請求項5の作業機。
【請求項7】
前記原動機は、電動モータである、請求項1から6の何れか一項の作業機。
【請求項8】
前記操作力調整機構は、前記ロック部材が押し込まれる過程において、前記押し込み量が前記所定量の1/2に達する前に、前記操作力を前記第1の力まで増大させる、請求項1から7の何れか一項の作業機。
【請求項9】
前記第1の力は、20N以上である、請求項1から8の何れか一項の作業機。
【請求項10】
前記操作力調整機構は、前記ロック部材が前記第1の力を受けてさらに押し込まれる場合、前記操作力を前記第1の力よりも小さい第2の力まで減少させ、
前記第1の力と前記第2の力の差は、15N以上である、請求項1から9の何れか一項の作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、作業機に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
特許文献1には、作業部と、前記作業部を駆動するための原動機と、ユーザが操作するための操作機構と、を備える作業機が開示される。前記操作機構は、前記ユーザが把持可能なグリップと、前記グリップに設けられ、前記作業部を駆動するためのトリガと、前記グリップに対して所定の方向に押し込み可能に設けられたロック部材を備える。前記ロック部材は、前記ロック部材の押し込み量が所定量未満である場合、前記トリガをロックし、前記押し込み量が前記所定量以上である場合、前記トリガをアンロックする。
【先行技術文献】
【特許文献】
【0003】
特開2014-159162号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業機の分野では、ユーザの意思に反して作業部が駆動されることを抑制することが望まれる。本明細書では、ユーザの意思に反して作業部が駆動されることを抑制することが可能な技術を提供する。
【課題を解決するための手段】
【0005】
本明細書が開示する作業機は、作業部と、前記作業部を駆動するための原動機と、ユーザが操作するための操作機構と、を備える。前記操作機構は、前記ユーザが把持可能なグリップと、前記グリップに設けられ、前記作業部を駆動するためのトリガと、前記グリップに対して所定の方向に押し込み可能に設けられたロック部材と、前記ロック部材の押し込み操作に要する操作力を調整するための操作力調整機構と、を備える。前記ロック部材は、前記ロック部材の押し込み量が所定量未満である場合、前記トリガをロックし、前記押し込み量が前記所定量以上である場合、前記トリガをアンロックする。前記操作力調整機構は、前記ロック部材が押し込まれる過程において、前記押し込み量が前記所定量に達する前に、前記操作力を第1の力まで増大させる。前記操作力調整機構は、前記ロック部材が前記第1の力を受けてさらに押し込まれる場合、前記操作力を前記第1の力よりも小さくする。
【0006】
上記の構成によれば、トリガがアンロックされる位置までロック部材を押し込むためには、第1の力でロック部材を押し込む必要がある。第1の力を大きくすることで、ユーザの意思に反してトリガがアンロックされることが抑制される。その結果、ユーザの意思に反してトリガがオンとなることが抑制されるので、ユーザの意思に反して作業部が駆動されることを抑制できる。さらに上記の構成によれば、ロック部材が第1の力で押し込まれると、操作力が第1の力よりも小さくなる。即ち、ユーザの意思が確認された後は、操作力が比較的小さくなる。このため、ユーザが意図的にロック部材を押し込んでいる状況では、ユーザの操作負担を低減することができる。
【0007】
本明細書が開示する別の作業機は、作業部と、前記作業部を駆動するための原動機と、ユーザが操作するための操作機構と、を備える。前記操作機構は、前記ユーザが把持可能なグリップと、前記グリップに設けられ、前記作業部を駆動するためのトリガと、前記グリップに対して所定の方向に押し込み可能に設けられたロック部材と、前記ロック部材の押し込み操作に要する操作力を調整するための操作力調整機構と、を備える。前記ロック部材の押し込み量が所定量未満である場合、前記トリガへの操作に応じた前記作業部の駆動が禁止され、前記押し込み量が前記所定量以上である場合、前記トリガへの操作に応じた前記作業部の駆動が許容される。前記操作力調整機構は、前記ロック部材が押し込まれる過程において、前記押し込み量が前記所定量に達する前に、前記操作力を第1の力まで増大させる。前記操作力調整機構は、前記ロック部材が前記第1の力を受けてさらに押し込まれる場合、前記操作力を前記第1の力よりも小さくする。
【0008】
上記の構成によれば、トリガへの操作に応じた作業部の駆動が許容される位置までロック部材を押し込むためには、第1の力でロック部材を押し込む必要がある。第1の力を大きくすることで、ユーザの意思に反して作業部が駆動されることを抑制できる。さらに上記の構成によれば、ロック部材が第1の力で押し込まれると、操作力が第1の力よりも小さくなる。即ち、ユーザの意思が確認された後は、操作力が比較的小さくなる。このため、ユーザが意図的にロック部材を押し込んでいる状況では、ユーザの操作負担を低減することができる。
【図面の簡単な説明】
【0009】
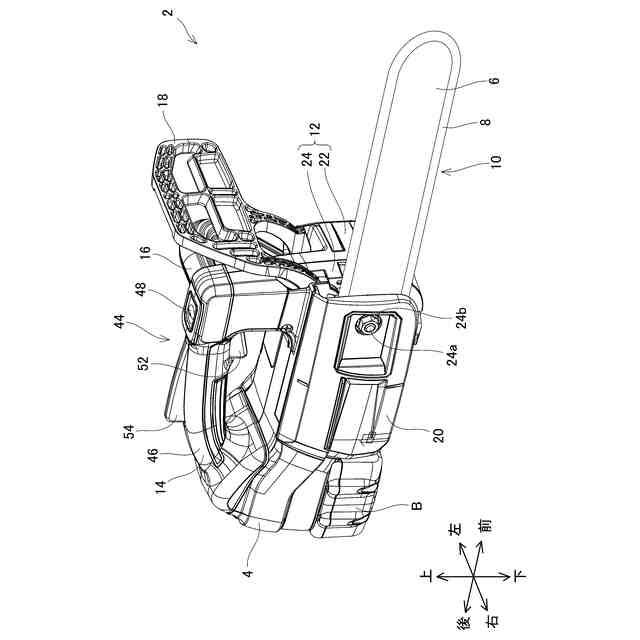
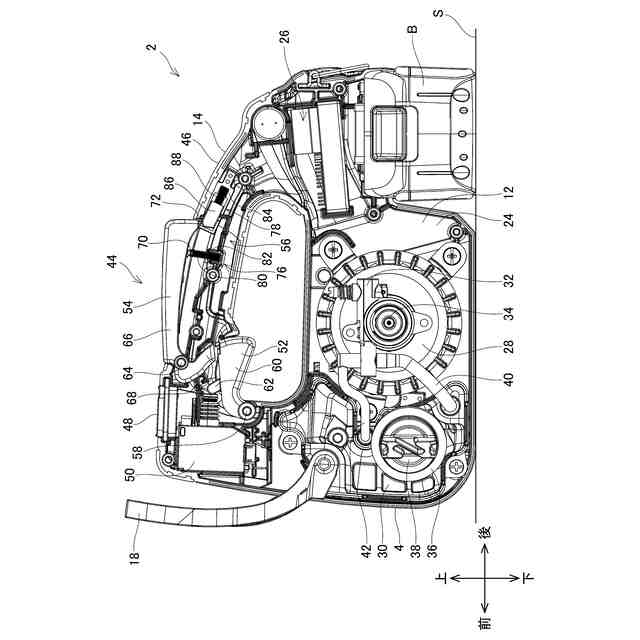
実施例1に係る作業機(チェーンソー2)を前方右方上方から見た図である。
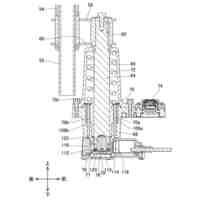
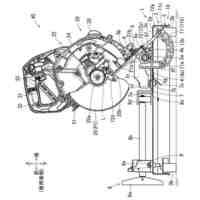
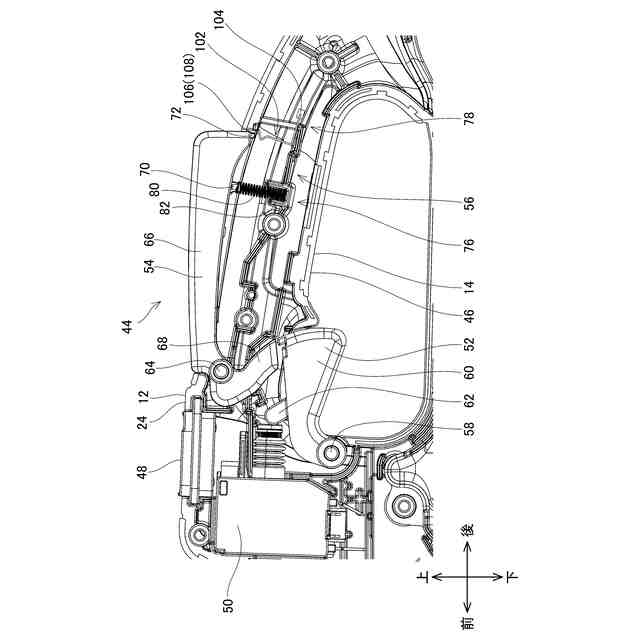
実施例1に係るチェーンソー2の内部構造を左方から見た図である。
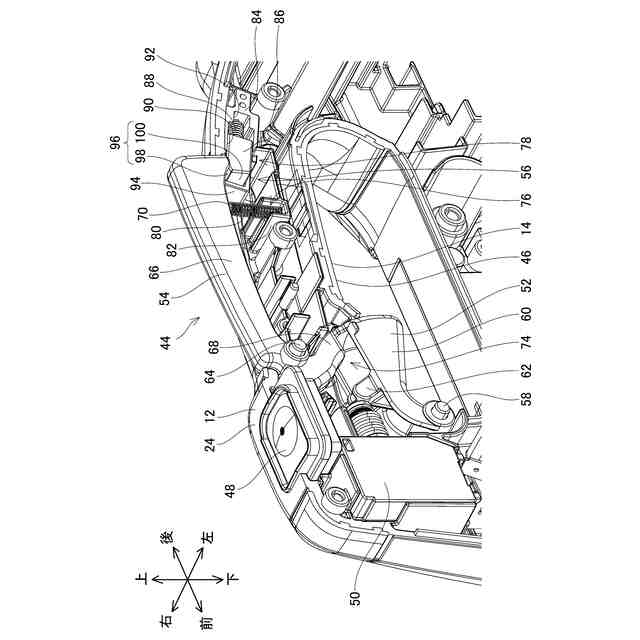
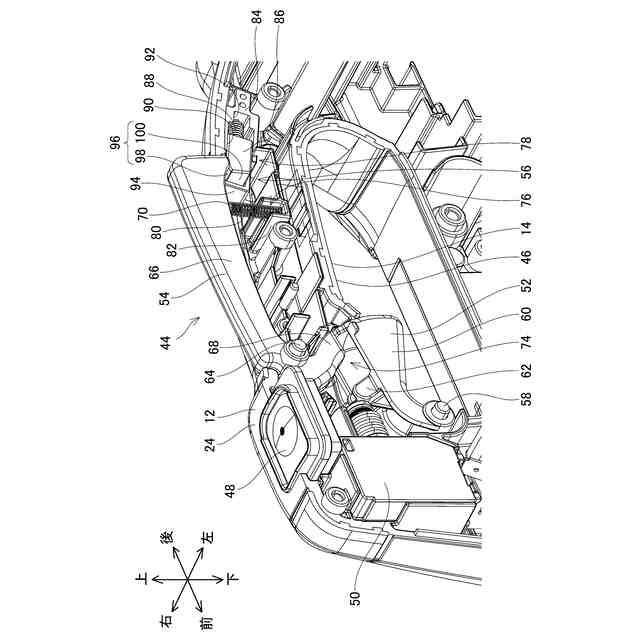
実施例1に係るチェーンソー2が備える操作機構44を前方左方上方から見た図である。
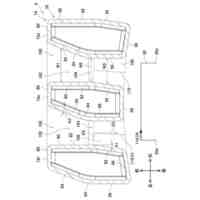
実施例1に係るチェーンソー2の、ロックレバー54の押し込み量θが0°である場合の操作機構44の様子を左方から見た図である。
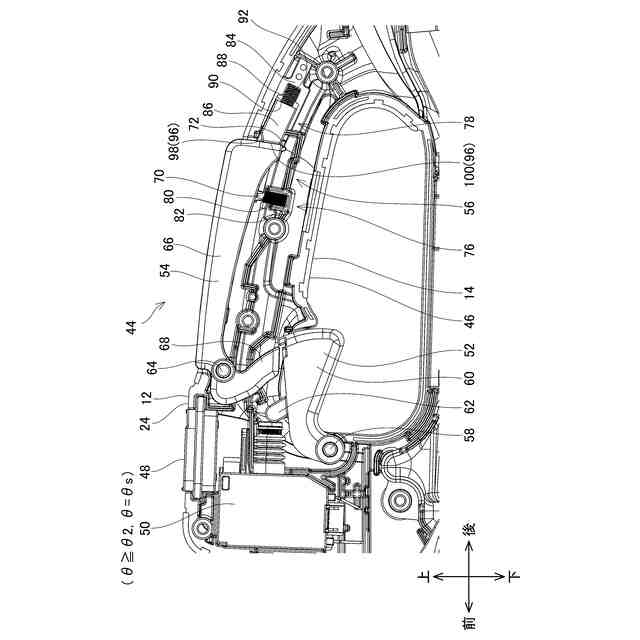
実施例1に係るチェーンソー2の、ロックレバー54の押し込み量θが第1押し込み量θ1である場合の操作機構44の様子を左方から見た図である。
実施例1に係るチェーンソー2の、ロックレバー54の押し込み量θが切替押し込み量θsである場合の操作機構44の様子を左方から見た図である。
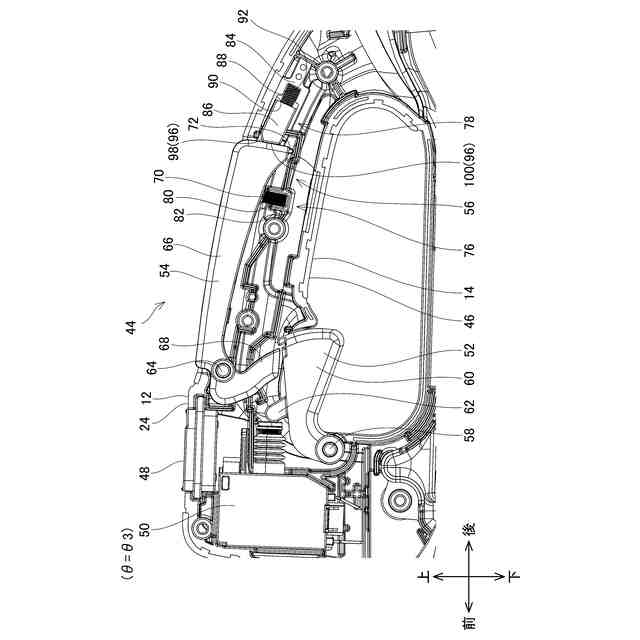
実施例1に係るチェーンソー2の、ロックレバー54の押し込み量θが第3押し込み量θ3である場合の操作機構44の様子を左方から見た図である。
実施例1に係るチェーンソー2における押し込み量θと操作力Fとの関係を近似的に描画したグラフである。
実施例2に係る作業機の、ロックレバー54の押し込み量θが0°である場合の操作機構44の様子を左方から見た図である。
実施例3に係る作業機の、ロックレバー54の押し込み量θが0°である場合の操作機構44の様子を左方から見た図である。
変形例に係る作業機における押し込み量θと操作力Fとの関係を近似的に描画したグラフである。
別の変形例に係る作業機における押し込み量θと操作力Fとの関係を近似的に描画したグラフである。
【発明を実施するための形態】
【0010】
本発明の代表的かつ非限定的な具体例について、図面を参照して以下に詳細に説明する。この詳細な説明は、本発明の好ましい例を実施するための詳細を当業者に示すことを単純に意図しており、本発明の範囲を限定することを意図したものではない。また、開示された追加的な特徴ならびに発明は、さらに改善された作業機を提供するために、他の特徴や発明とは別に、又は共に用いることができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
運搬車
25日前
株式会社マキタ
運搬車
25日前
株式会社マキタ
運搬車
25日前
株式会社マキタ
電動工具
10日前
株式会社マキタ
打撃工具
16日前
株式会社マキタ
電動工具
16日前
株式会社マキタ
電動作業機
16日前
株式会社マキタ
電動作業機
26日前
株式会社マキタ
電動作業機
26日前
株式会社マキタ
背負ユニット
24日前
株式会社マキタ
ハンマ用作業カート
17日前
株式会社マキタ
金工用定置式切断機
17日前
株式会社マキタ
草刈機および草刈ガイド
24日前
株式会社マキタ
携帯用切断機用スタンドおよび定置式切断機
16日前
株式会社マキタ
電動掘削機、掘削システム、及びドリルアセンブリ
25日前
株式会社マキタ
充電式アングルドリル及び充電式アースオーガドリル
25日前
個人
木製ハンマー
3か月前
個人
関節モジュール
2か月前
個人
寸切りボルト回し
2か月前
個人
スロットルトリガー
3か月前
日東精工株式会社
搬送装置
7か月前
中国電力株式会社
腰袋
6か月前
太陽工業株式会社
チャック装置
2か月前
コクヨ株式会社
補助器具
2か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
衝撃工具
5か月前
日東工器株式会社
動力工具
3か月前
個人
メンテナンス用スタンド
4か月前
株式会社マキタ
打撃工具
16日前
学校法人立命館
グリッパ
2か月前
川崎重工業株式会社
罫書用治具
5か月前
オムロン株式会社
電動把持工具
2か月前
CKD株式会社
把持装置
3か月前
東京計器株式会社
接触検知装置
3か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ