TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024148816
公報種別
公開特許公報(A)
公開日
2024-10-18
出願番号
2023062279
出願日
2023-04-06
発明の名称
データ収集方法、データ収集用移動装置、学習済みモデル、学習済みモデルの製造方法、自律型移動装置、学習用データの製造方法
出願人
オムロン株式会社
,
国立研究開発法人理化学研究所
代理人
個人
,
個人
主分類
G05D
1/43 20240101AFI20241010BHJP(制御;調整)
要約
【課題】機械学習の推論による移動経路の決定の精度の向上を可能にするデータ収集方法、データ収集用移動装置、学習済みモデル、学習済みモデルの製造方法、自律型移動装置、及び、学習用データの製造方法を提供する。
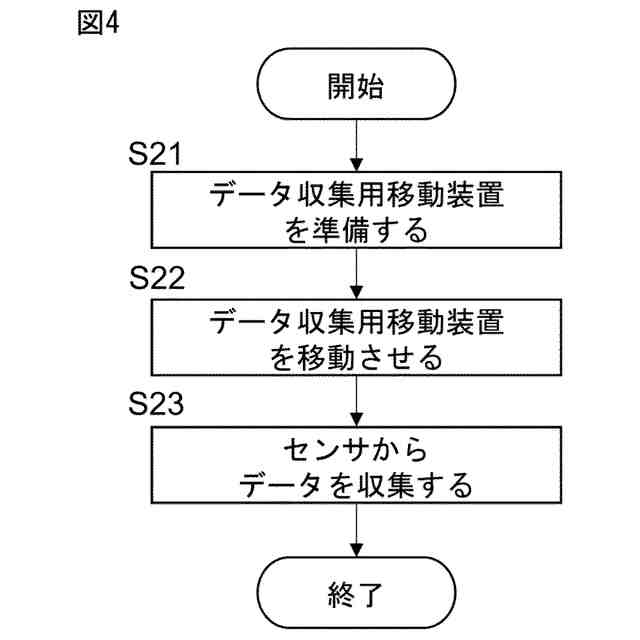
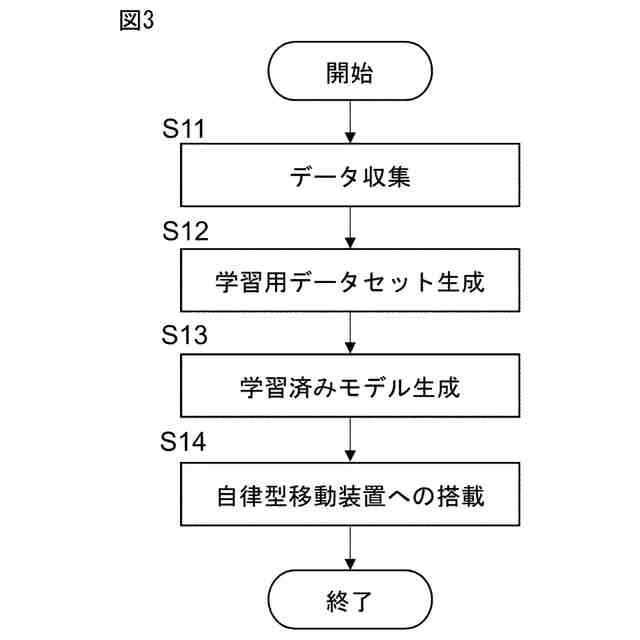
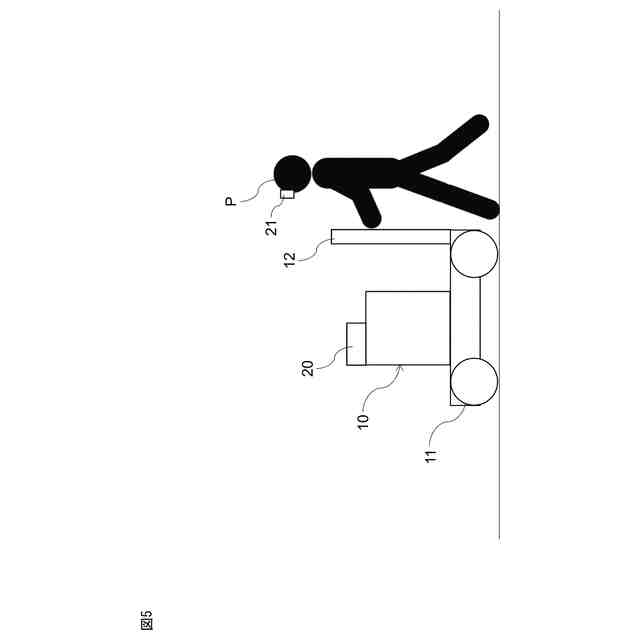
【解決手段】データ収集方法は、自律型移動装置が周囲状況に応じて自身の移動経路を決定するために用いる学習済みモデルの構築に用いられるデータ収集方法であって、他律型移動機構を有するデータ収集用移動装置を、周囲状況下で、人が移動させ(S22)、1以上のセンサから、周囲状況下でのデータ収集用移動装置の移動経路を表すデータを収集する(S23)。他律型移動機構は、自律型移動装置の移動を模した移動を可能にするように自律型移動装置の移動機構と共通する構造を有する。
【選択図】図4
特許請求の範囲
【請求項1】
自律型移動装置が周囲状況に応じて自身の移動経路を決定するために用いる学習済みモデルの構築に用いられるデータ収集方法であって、
他律型移動機構を有するデータ収集用移動装置を、前記周囲状況下で、人が移動させ、
1以上のセンサから、前記周囲状況下での前記データ収集用移動装置の移動経路を表すデータを収集し、
前記他律型移動機構は、前記自律型移動装置の移動を模した移動を可能にするように前記自律型移動装置の移動機構と共通する構造を有する、
データ収集方法。
続きを表示(約 1,100 文字)
【請求項2】
前記他律型移動機構は、前記自律型移動装置と同じ移動経路で移動可能に構成される、
請求項1に記載のデータ収集方法。
【請求項3】
前記他律型移動機構は、前記自律型移動装置が移動できない移動経路での移動が制限されるように構成される、
請求項1に記載のデータ収集方法。
【請求項4】
前記データ収集用移動装置の水平面内での大きさは、前記自律型移動装置の水平面内での大きさに対応する、
請求項1に記載のデータ収集方法。
【請求項5】
前記1以上のセンサのうちの少なくとも1のセンサは、前記データ収集用移動装置に搭載され、当該搭載されたセンサによって得られる情報を取得する、
請求項1に記載のデータ収集方法。
【請求項6】
前記1以上のセンサは、前記データ収集用移動装置を移動させる場所に、前記場所での前記データ収集用移動装置の移動時に前記1以上のセンサの少なくとも一つで、前記データ収集用移動装置が感知されるように配置される、
請求項1に記載のデータ収集方法。
【請求項7】
前記1以上のセンサは、前記周囲状況の画像のデータを取得する画像センサ又は前記周囲状況の距離のデータを取得する距離センサの少なくとも一方を含む、
請求項1に記載のデータ収集方法。
【請求項8】
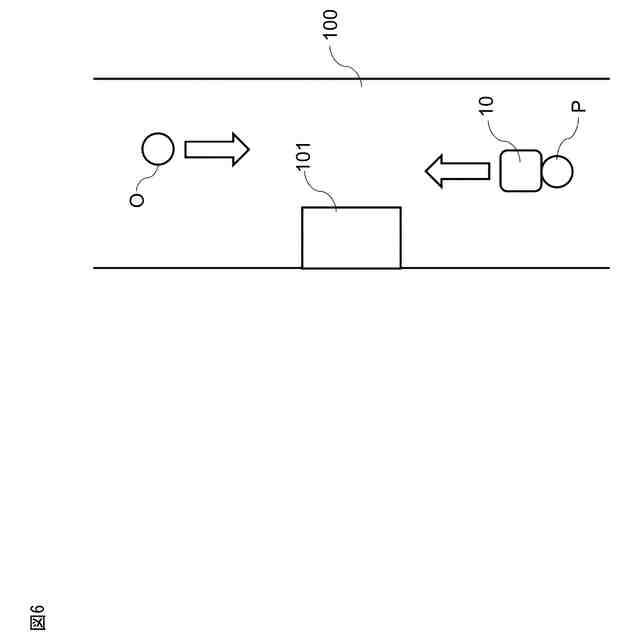
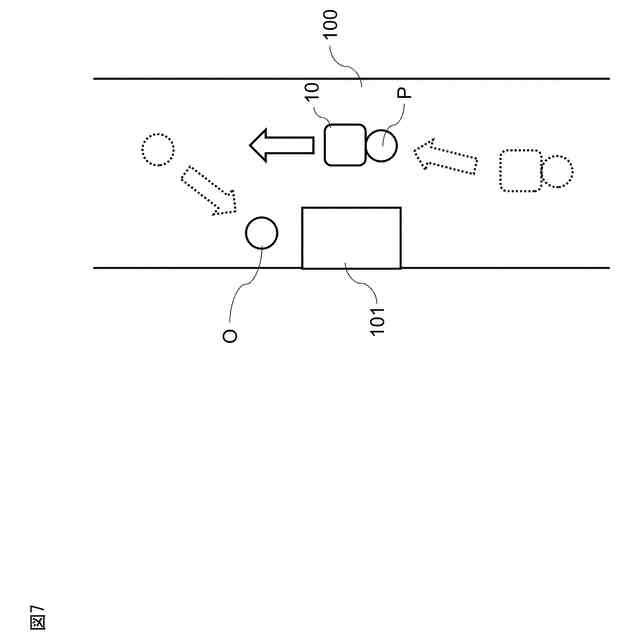
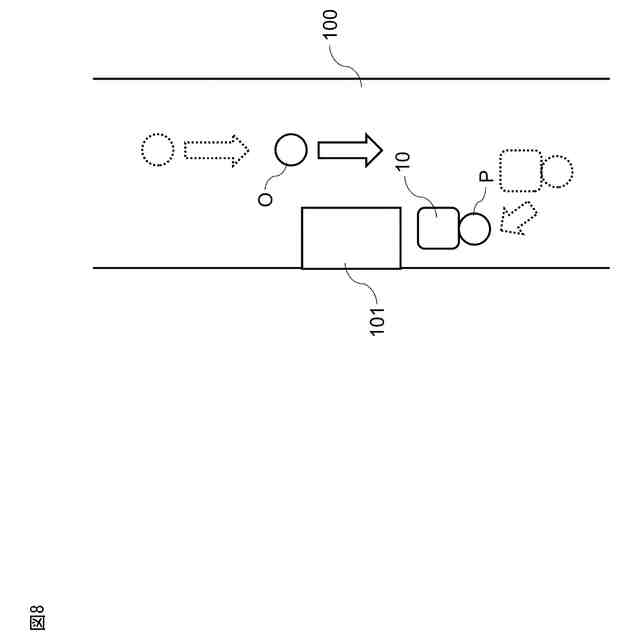
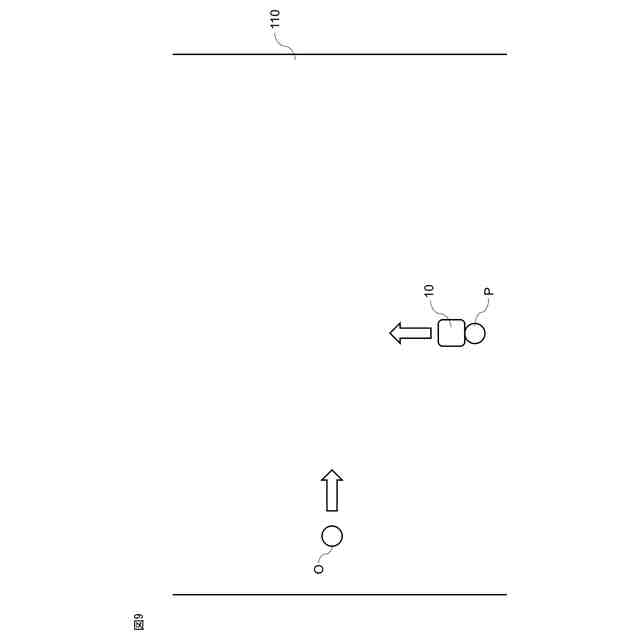
前記周囲状況は、前記データ収集用移動装置が対象物とすれ違う状況、前記データ収集用移動装置の前方を対象物が横切る状況、又は、前記データ収集用移動装置の前方に前記データ収集用移動装置より遅い速度で同じ方向に移動する対象物が存在する状況のいずれかである、
請求項1に記載のデータ収集方法。
【請求項9】
自律型移動装置が周囲状況に応じて自身の移動経路を決定するために用いる学習済みモデルの構築に用いられるデータを収集するデータ収集用移動装置であって、
前記自律型移動装置の移動を模した移動を可能にするように前記自律型移動装置の移動機構と共通する構造を有する他律型移動機構と、
人が決定した移動経路に沿って前記他律型移動機構を移動させるための伝達機構と、
前記周囲状況下での前記データ収集用移動装置の移動経路を表すデータを収集する1以上のセンサと、
を備える、
データ収集用移動装置。
【請求項10】
前記1以上のセンサからさらに、前記移動に伴って得られる対象物の位置、姿勢又は骨格の少なくとも一つを含むデータを収集する、
請求項9に記載のデータ収集用移動装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、データ収集方法、データ収集用移動装置、学習済みモデル、学習済みモデルの製造方法、自律型移動装置、及び、学習用データの製造方法、に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1は、訓練されたナビゲーションモデルに基づいて、歩行者で混雑した環境において移動ロボットを誘導する方法及びシステムを開示する。特許文献1は、ナビゲーションモデルの訓練に用いるデータを、歩行者とすれ違う訓練者の動き方を外部カメラで計測して収集する技術を開示する。
【0003】
非特許文献1は、自律走行搬送ロボット(Autonomous Mobile Robot;AMR)に用いられるディープニューラルネットワークの構築において、訓練者がコントローラ(例えば、ジョイスティック)でロボットを操作することで歩行者とロボットのすれ違いデータを収集する技術を開示する。
【先行技術文献】
【特許文献】
【0004】
特開2019-36192号公報
【非特許文献】
【0005】
Satoshi Hoshino, Joichiro Sumiyoshi, "End-to-End Discrete Motion Planner based on Deep Neural Network for Autonomous Mobile Robots", (米), 2020 IEEE/SICE International Symposium on System Integration (SII), 2020年1月, Vol. 2020, p.12-17
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1では、訓練者が直接動くためリアルな人の動き方を計測することが可能である。しかしながら、移動ロボットは、車輪を備えるため、必ずしも訓練者の動きを模倣できるとは限らない。逆に言えば、訓練者は、移動ロボットが通行できない移動経路を選択し得る。つまり、特許文献1では、機械学習に用いるデータに、移動ロボットが実行できない行動のデータが含まれ得る。これは、機械学習の推論による移動経路の決定の精度の低下の一因になり得る。
【0007】
非特許文献1では、訓練者がコントローラ(例えば、ジョイスティック)でロボットを操作するため、ロボットが走行できる範囲内のデータを収集することが可能である。しかしながら、訓練者がコントローラを用いたロボットの操作に不慣れであるとロボットの操作に意識が行き過ぎて訓練者としてのリアルな行動を計測できない場合がある。また、訓練者がコントローラを用いたロボットの操作に熟練していても、操作ミスは生じ得る。結果として、機械学習に用いるデータに、訓練者が思った通りにロボットを操作できなかった場合のデータが含まれ得る。これは、機械学習の推論による移動経路の決定の精度の低下の一因になり得る。
【0008】
本開示は、機械学習の推論による移動経路の決定の精度の向上を可能にする、データ収集方法、データ収集用移動装置、学習済みモデル、学習済みモデルの製造方法、自律型移動装置、及び、学習用データの製造方法を提供する。
【課題を解決するための手段】
【0009】
本開示の一態様にかかるデータ収集方法は、自律型移動装置が周囲状況に応じて自身の移動経路を決定するために用いる学習済みモデルの構築に用いられるデータ収集方法であって、他律型移動機構を有するデータ収集用移動装置を、周囲状況下で、人が移動させ、1以上のセンサから、周囲状況下でのデータ収集用移動装置の移動経路を表すデータを収集し、他律型移動機構は、自律型移動装置の移動を模した移動を可能にするように自律型移動装置の移動機構と共通する構造を有する。
【0010】
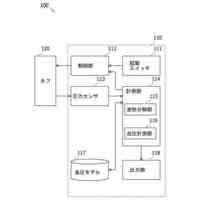
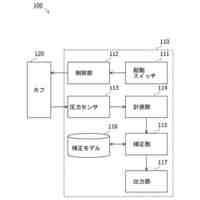
本開示の一態様にかかるデータ収集用移動装置は、上記のデータ収集方法で用いられ、他律型移動機構と、1以上のセンサと、人の移動意図を他律型移動機構による移動に反映させるための伝達機構と、を備える。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
継電器
19日前
オムロン株式会社
コネクタ
27日前
オムロン株式会社
操作装置
1か月前
オムロン株式会社
入力装置
28日前
オムロン株式会社
電磁継電器
27日前
オムロン株式会社
電磁継電器
27日前
オムロン株式会社
電磁継電器
27日前
オムロン株式会社
リミットスイッチ
19日前
オムロン株式会社
制御装置およびプログラム
19日前
オムロン株式会社
制御装置およびプログラム
19日前
オムロン株式会社
券売システム、および券売方法
19日前
オムロン株式会社
導光板ユニット、および遊技機
1か月前
オムロン株式会社
導光板、および導光板ユニット
27日前
オムロン株式会社
支援装置、支援方法及び支援プログラム
27日前
オムロン株式会社
情報処理システム、情報処理方法およびプログラム
27日前
オムロン株式会社
情報処理システム、情報処理方法およびプログラム
27日前
オムロン株式会社
情報処理システム、情報処理方法およびプログラム
27日前
オムロン株式会社
情報処理システム、情報処理方法およびプログラム
27日前
オムロン株式会社
経路計画装置、方法、プログラム、及び移動制御システム
27日前
オムロン株式会社
点検支援システム、点検支援方法、及び点検支援プログラム
1か月前
オムロン株式会社
商品販売システム、商品販売方法、及び商品販売プログラム
1か月前
オムロン株式会社
電磁継電器
19日前
オムロン株式会社
充電制御システム、充電制御装置、充電制御方法およびプログラム
5日前
オムロン株式会社
タイヤ状態判定装置、タイヤ状態判定方法、およびタイヤ状態判定プログラム
6日前
オムロン株式会社
タイヤ状態判定装置、タイヤ状態判定方法、およびタイヤ状態判定プログラム
6日前
オムロン株式会社
血圧計、血圧計測方法、血圧計測プログラム、学習モデルの構築方法及び学習モデルの構築プログラム
5日前
オムロン株式会社
血圧計、血圧計測方法、血圧計測プログラム、学習モデルの構築方法及び学習モデルの構築プログラム
5日前
個人
方向検出器
6日前
積水樹脂株式会社
磁性シート
1か月前
ugo株式会社
移動体
6日前
個人
車両レバー操作装置
1か月前
株式会社豊田自動織機
自動走行体
2か月前
株式会社豊田自動織機
無人走行体
1か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
エイブリック株式会社
基準電圧回路装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ