TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024155611
公報種別
公開特許公報(A)
公開日
2024-10-31
出願番号
2023070470
出願日
2023-04-21
発明の名称
経路計画装置、方法、プログラム、及び移動制御システム
出願人
オムロン株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
G05D
1/43 20240101AFI20241024BHJP(制御;調整)
要約
【課題】適切なタイミングでゴール地点までの低コスト経路を再度算出する。
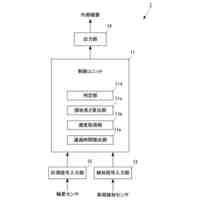
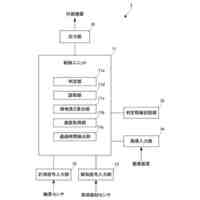
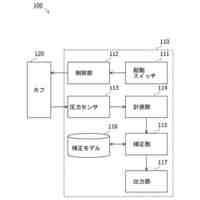
【解決手段】経路計画装置は、予め構築された障害物の位置を含む地図に基づいて、スタート地点からゴール地点までの低コスト経路を算出するグローバル計画部と、前記低コスト経路を追従するための移動体の速度又は角速度を毎時刻指定するローカル計画部と、毎時刻における前記移動体の周囲の障害物を計測したセンサ情報を取得するセンシング部と、前記地図及び前記センサ情報に基づいて、前記低コスト経路を再度算出する再計画部と、前記センサ情報の時系列、及び前記移動体の軌跡を記憶する記憶部と、前記センサ情報の時系列、前記移動体の軌跡、前記低コスト経路、及び前記ゴール地点に基づいて、前記再計画部による算出を行うタイミングであるか否かを判断するための予め学習された判断モデルを用いて、前記再計画部による算出を行うか否かを判断するタイミング判断部と、を含む。
【選択図】図1
特許請求の範囲
【請求項1】
予め構築された障害物の位置を含む地図に基づいて、スタート地点からゴール地点までの低コスト経路を算出するグローバル計画部と、
前記低コスト経路を追従するための移動体の速度又は角速度を毎時刻指定するローカル計画部と、
毎時刻における前記移動体の周囲の障害物を計測したセンサ情報を取得するセンシング部と、
前記地図及び前記センサ情報に基づいて、前記低コスト経路を再度算出する再計画部と、
前記センサ情報の時系列、及び前記移動体の軌跡を記憶する記憶部と、
前記センサ情報の時系列、前記移動体の軌跡、前記低コスト経路、及び前記ゴール地点に基づいて、前記再計画部による算出を行うタイミングであるか否かを判断するための予め学習された判断モデルを用いて、前記再計画部による算出を行うか否かを判断するタイミング判断部と、
を含む経路計画装置。
続きを表示(約 1,800 文字)
【請求項2】
過去のスタート地点からゴール地点までの移動履歴データであって、かつ、毎時刻における前記センサ情報、前記移動体の軌跡、毎時刻における前記低コスト経路、及び前記ゴール地点を含む移動履歴データから、強化学習により前記判断モデルを学習する学習部を更に含む請求項1記載の経路計画装置。
【請求項3】
前記強化学習における報酬は、ゴール地点まで到達したか否か、又は前記ゴール地点までの到達時間に基づいて定められる請求項2記載の経路計画装置。
【請求項4】
前記移動履歴データは、前記移動体と同じ移動体について得られたものである請求項2又は3記載の経路計画装置。
【請求項5】
前記移動履歴データは、前記移動体とは異なる移動体について得られたものである請求項2又は3記載の経路計画装置。
【請求項6】
前記移動履歴データは、前記移動体の移動に関するシミュレーションにより得られたものである請求項2又は3記載の経路計画装置。
【請求項7】
予め構築された障害物の位置を含む地図に基づいて、スタート地点からゴール地点までの低コスト経路を算出し、
前記低コスト経路を追従するための移動体の速度又は角速度を毎時刻指定し、
毎時刻における前記移動体の周囲の障害物を計測したセンサ情報を取得し、
前記センサ情報の時系列、及び前記移動体の軌跡を記憶部に記憶し、
前記センサ情報の時系列、前記移動体の軌跡、前記低コスト経路、及び前記ゴール地点に基づいて、前記低コスト経路を再度算出するタイミングであるか否かを判断するための予め学習された判断モデルを用いて、前記低コスト経路を再度算出するか否かを判断し、
前記低コスト経路を再度算出すると判断された場合に、前記地図及び前記センサ情報に基づいて、前記低コスト経路を再度算出する
ことを含む処理をコンピュータが実行する経路計画方法。
【請求項8】
コンピュータを、
予め構築された障害物の位置を含む地図に基づいて、スタート地点からゴール地点までの低コスト経路を算出するグローバル計画部、
前記低コスト経路を追従するための移動体の速度又は角速度を毎時刻指定するローカル計画部、
毎時刻における前記移動体の周囲の障害物を計測したセンサ情報を取得するセンシング部、
前記地図及び前記センサ情報に基づいて、前記低コスト経路を再度算出する再計画部、
前記センサ情報の時系列、及び前記移動体の軌跡を記憶する記憶部、及び
前記センサ情報の時系列、前記移動体の軌跡、前記低コスト経路、及び前記ゴール地点に基づいて、前記再計画部による算出を行うタイミングであるか否かを判断するための予め学習された判断モデルを用いて、前記再計画部による算出を行うか否かを判断するタイミング判断部
として機能させるための経路計画プログラム。
【請求項9】
制御装置と、移動体とを含む移動制御システムであって、
前記制御装置は、
予め構築された障害物の位置を含む地図に基づいて、スタート地点からゴール地点までの低コスト経路を算出するグローバル計画部と、
前記低コスト経路を追従するための移動体の速度又は角速度を毎時刻指定するローカル計画部と、
毎時刻における前記移動体の周囲の障害物を計測したセンサ情報を取得するセンシング部と、
前記地図及び前記センサ情報に基づいて、前記低コスト経路を再度算出する再計画部と、
前記センサ情報の時系列、及び前記移動体の軌跡を記憶する記憶部と、
前記センサ情報の時系列、前記移動体の軌跡、前記低コスト経路、及び前記ゴール地点に基づいて、前記再計画部による算出を行うタイミングであるか否かを判断するための予め学習された判断モデルを用いて、前記再計画部による算出を行うか否かを判断するタイミング判断部と、
毎時刻指定された移動体の速度又は角速度を前記移動体に通知する通信部と、を含み、
前記移動体は、毎時刻における前記移動体の周囲の障害物を計測したセンサ情報を前記制御装置へ通知し、
通知された前記移動体の速度又は角速度に従って移動する、
移動制御システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、経路計画装置、経路計画方法、経路計画プログラム、及び移動制御システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、自律移動の実装で一般に用いられるROS Navigation Stackでは、障害物からの距離やロボットの停止時間といった情報からヒューリスティックに「ロボットが先に進めなくなっている」という状態を定義し、それに基づいて経路の再計画を実施することになる。あるいは、1Hzなど適当な周期で経路の再計画を行うこともある。
【0003】
また、「グローバルプランニング(グーバル計画)された経路上で次にどこに向かうべきか」という中継地点を、観測された障害物情報から算出する機械学習モデルを学習する手法がある(例えば非特許文献1)。
【先行技術文献】
【非特許文献】
【0004】
K▲a▼stner et al., “Connecting Deep-Reinforcement-Learning-based Obstacle Avoidance with Conventional Global Planners using Waypoint Generators” https://arxiv.org/pdf/2104.03663.pdf
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記のROS Navigation Stackでは、これらのヒューリスティックなルールがゴール到達確率や所要時間を最適にする保証は全くない。
【0006】
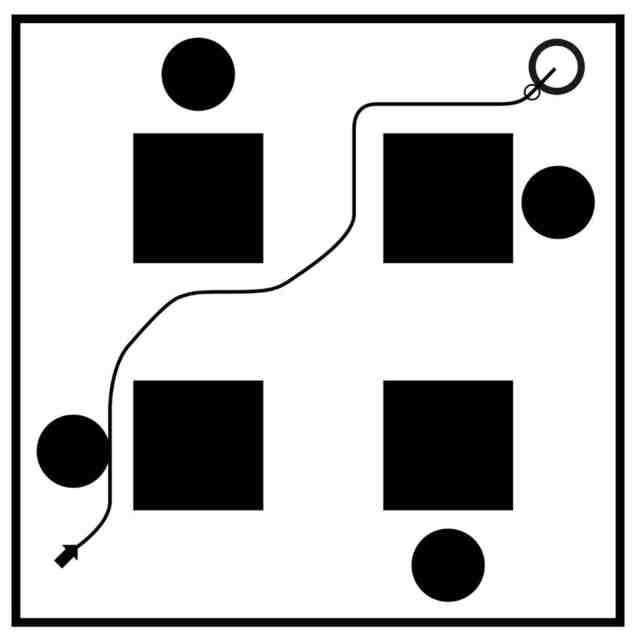
また、上記非特許文献1に記載の手法では、経路自体として、既知の障害物マップから算出したものを利用し続けるため、「新たな障害物が発生して経路の途中が通行止めになってしまっている」というケースに対して、経路の再計画による迂回経路の発見といった対応をすることができない。
【0007】
本開示は、上記の点に鑑みてなされたものであり、適切なタイミングでゴール地点までの低コスト経路を再度算出することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本開示に係る経路計画装置は、予め構築された障害物の位置を含む地図に基づいて、スタート地点からゴール地点までの低コスト経路を算出するグローバル計画部と、前記低コスト経路を追従するための移動体の速度又は角速度を毎時刻指定するローカル計画部と、毎時刻における前記移動体の周囲の障害物を計測したセンサ情報を取得するセンシング部と、前記地図及び前記センサ情報に基づいて、前記低コスト経路を再度算出する再計画部と、前記センサ情報の時系列、及び前記移動体の軌跡を記憶する記憶部と、前記センサ情報の時系列、前記移動体の軌跡、前記低コスト経路、及び前記ゴール地点に基づいて、前記再計画部による算出を行うタイミングであるか否かを判断するための予め学習された判断モデルを用いて、前記再計画部による算出を行うか否かを判断するタイミング判断部と、を含んで構成される。ここで、低コスト経路とは、計算しうる経路のうち、移動距離が最短となる経路、移動時間が最短となる経路、移動エネルギーが最少となる経路、移動不能となるリスクの低い経路を含み得る。
【0009】
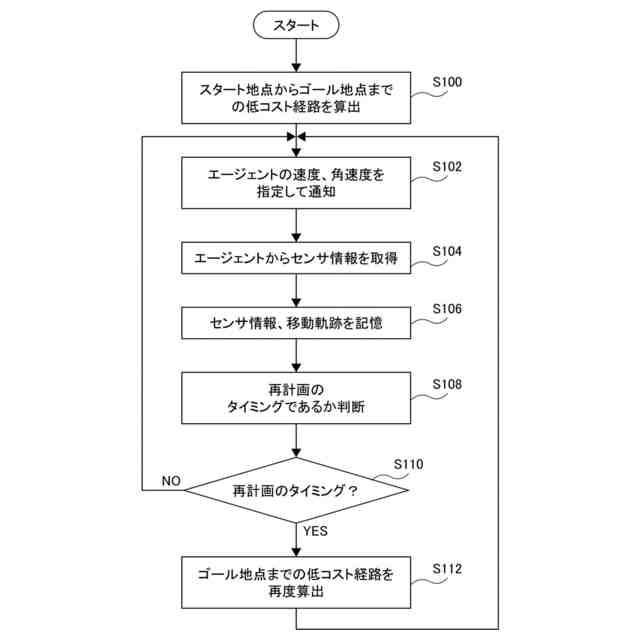
また、本開示に係る経路計画方法は、予め構築された障害物の位置を含む地図に基づいて、スタート地点からゴール地点までの低コスト経路を算出し、前記低コスト経路を追従するための移動体の速度又は角速度を毎時刻指定し、毎時刻における前記移動体の周囲の障害物を計測したセンサ情報を取得し、前記センサ情報の時系列、及び前記移動体の軌跡を記憶部に記憶し、前記センサ情報の時系列、前記移動体の軌跡、前記低コスト経路、及び前記ゴール地点に基づいて、前記低コスト経路を再度算出するタイミングであるか否かを判断するための予め学習された判断モデルを用いて、前記低コスト経路を再度算出するか否かを判断し、前記低コスト経路を再度算出すると判断された場合に、前記地図及び前記センサ情報に基づいて、前記低コスト経路を再度算出することを含む処理をコンピュータが実行する。
【0010】
また、本開示に係る経路計画プログラムは、コンピュータを、予め構築された障害物の位置を含む地図に基づいて、スタート地点からゴール地点までの低コスト経路を算出するグローバル計画部、前記低コスト経路を追従するための移動体の速度又は角速度を毎時刻指定するローカル計画部、毎時刻における前記移動体の周囲の障害物を計測したセンサ情報を取得するセンシング部、前記地図及び前記センサ情報に基づいて、前記低コスト経路を再度算出する再計画部、前記センサ情報の時系列、及び前記移動体の軌跡を記憶する記憶部、及び前記センサ情報の時系列、前記移動体の軌跡、前記低コスト経路、及び前記ゴール地点に基づいて、前記再計画部による算出を行うタイミングであるか否かを判断するための予め学習された判断モデルを用いて、前記再計画部による算出を行うか否かを判断するタイミング判断部として機能させる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
継電器
16日前
オムロン株式会社
コネクタ
24日前
オムロン株式会社
操作装置
1か月前
オムロン株式会社
入力装置
25日前
オムロン株式会社
電磁継電器
24日前
オムロン株式会社
電磁継電器
24日前
オムロン株式会社
電磁継電器
24日前
オムロン株式会社
電力変換装置
1か月前
オムロン株式会社
認証中継サーバ
1か月前
オムロン株式会社
リミットスイッチ
16日前
オムロン株式会社
制御装置およびプログラム
16日前
オムロン株式会社
制御装置およびプログラム
16日前
オムロン株式会社
導光板、および導光板ユニット
24日前
オムロン株式会社
導光板ユニット、および遊技機
1か月前
オムロン株式会社
券売システム、および券売方法
16日前
オムロン株式会社
支援装置、支援方法及び支援プログラム
24日前
オムロン株式会社
制御装置、方法、プログラム、及び制御システム
1か月前
オムロン株式会社
情報処理システム、情報処理方法およびプログラム
24日前
オムロン株式会社
情報処理システム、情報処理方法およびプログラム
24日前
オムロン株式会社
情報処理システム、情報処理方法およびプログラム
24日前
オムロン株式会社
情報処理システム、情報処理方法およびプログラム
24日前
オムロン株式会社
経路計画装置、方法、プログラム、及び移動制御システム
24日前
オムロン株式会社
点検支援システム、点検支援方法、及び点検支援プログラム
1か月前
オムロン株式会社
電磁継電器
16日前
オムロン株式会社
点検支援システム、点検支援方法、及び点検支援プログラム
1か月前
オムロン株式会社
商品販売システム、商品販売方法、及び商品販売プログラム
1か月前
オムロン株式会社
商品販売システム、商品販売方法、及び商品販売プログラム
1か月前
オムロン株式会社
充電制御システム、充電制御装置、充電制御方法およびプログラム
2日前
オムロン株式会社
聴診装置およびこれを備えた聴診システム、聴診方法、聴診プログラム
1か月前
オムロン株式会社
転落検知装置、転落検知システム、転落検知方法および転落検知プログラム
1か月前
オムロン株式会社
タイヤ状態判定装置、タイヤ状態判定方法、およびタイヤ状態判定プログラム
3日前
オムロン株式会社
タイヤ状態判定装置、タイヤ状態判定方法、およびタイヤ状態判定プログラム
3日前
オムロン株式会社
旅客流動情報生成装置、旅客流動情報生成方法、および、旅客流動情報生成プログラム
1か月前
オムロン株式会社
旅客流動情報生成装置、旅客流動情報生成方法、および、旅客流動情報生成プログラム
1か月前
オムロン株式会社
血圧計、血圧計測方法、血圧計測プログラム、学習モデルの構築方法及び学習モデルの構築プログラム
2日前
オムロン株式会社
血圧計、血圧計測方法、血圧計測プログラム、学習モデルの構築方法及び学習モデルの構築プログラム
2日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ