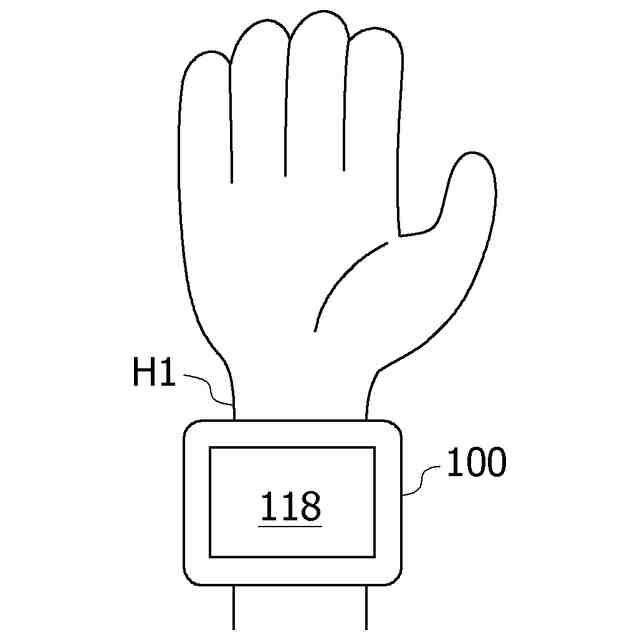
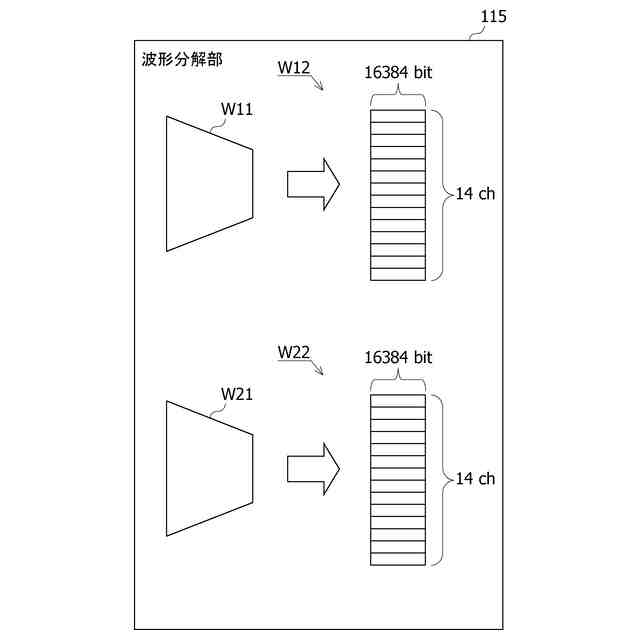
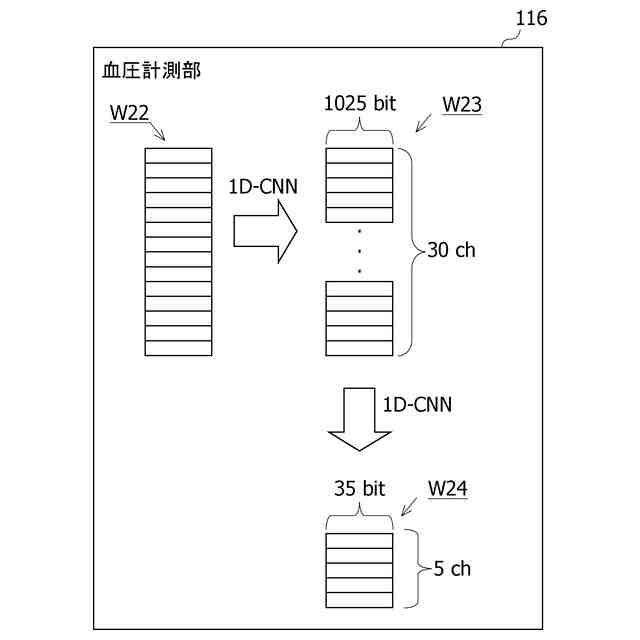
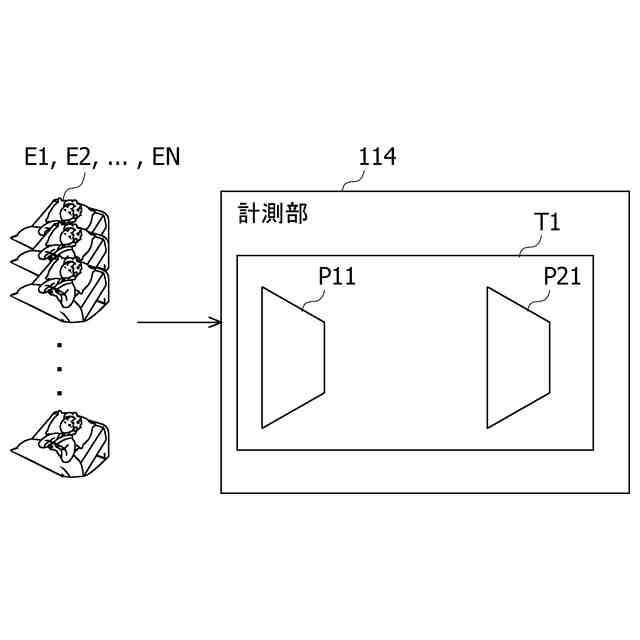
発明の詳細な説明【技術分野】 【0001】 本発明は、血圧計、血圧計測方法、血圧計測プログラム、学習モデルの構築方法及び学習モデルの構築プログラムに関する。 続きを表示(約 2,900 文字)【背景技術】 【0002】 血圧計測によって健康状態を把握することが行われている。血圧の計測では、深層学習を含む機械学習によって血圧の計測精度を高める試みが行われている。深層学習を用いた血圧の計測としては、例えば、脈拍の一拍毎の形状や脈波形の包絡線の形状をモデルに入力して血圧を計測する方法が検討されている(非特許文献1-3参照)。 【先行技術文献】 【非特許文献】 【0003】 Ahmadreza Argha, Branko G. Celler, Nigel H. Lovell, Artificial Intelligence Based Blood Pressure Estimation From Auscultatory and Oscillometric Waveforms: A Methodological Review、「IEEE REVIEWS IN BIOMEDICAL ENGINEERING」、(米国)、2022年、VOL.15、p.152-p.168 AHMADREZA ARGHA, JI WU, STEVEN W. SU, AND BRANKO G. CELLER、「Blood Pressure Estimation From Beat-by-Beat Time-Domain Features of Oscillometric Waveforms Using Deep-Neural-Network Classification Models」、[online]、2019年8月6日、IEEE、[2023年3月28日検索]、インターネット<URL: https://ieeexplore.ieee.org/document/8789404> Ahmed S. Alghamdi, Kemal Polat, Abdullah Alghoson, Abdulrahman A. Alshdadi, Ahmed A. Abd El-Latif、Gaussian process regression (GPR) based non-invasive continuous blood pressure prediction method from cuff oscillometric signals、[online]、2020年2月20日、[2023年3月28日検索]、インターネット<URL: https://www.sciencedirect.com/science/article/abs/pii/S0003682X20301079?via%3Dihub> 【発明の概要】 【発明が解決しようとする課題】 【0004】 オシロメトリック法による血圧計測では脈波の波形を基に血圧を計測するため、脈波にノイズが含まれると血圧の計測精度が低下する。カフの巻き方やカフを巻く位置等によって脈波に含まれるノイズが増加し得る。そのため、当該ノイズによる影響を抑制するために、測定した血圧に対するキャリブレーションや、血圧測定アルゴリズムのパラメタ設定のためのデータ収集が実施されることになる。しかしながら、キャリブレーションや血圧測定のアルゴリズムへのパラメタ設定が実施されてもノイズによる計測誤差を取り除ける保証は無い上に、データを収集するコストも必要になる。 【0005】 開示の技術の1つの側面は、血圧測定アルゴリズムのパラメタ設定のためのデータ収集や測定結果のキャリブレーションを実施しなくとも可及的に高精度な血圧計測を実施できる血圧計、血圧計測方法、血圧計測プログラム、学習モデルの構築方法及び学習モデルの構築プログラムを提供することを目的とする。 【課題を解決するための手段】 【0006】 開示の技術の1つの側面は、次のような血圧計によって例示される。本血圧計は、被計測者の腕に巻かれるカフと、上記カフが上記腕から受けるカフ圧を検出する検出部と、上 記カフ圧を基に上記被計測者の血圧に係る特徴量の時系列変化を示す第1の波形を取得し、上記第1の波形を2以上の異なる特徴量を示す複数の第2の波形に分解する分解部と、被験者についての上記第2の波形を説明変数とし聴診法で実測された血圧を目的変数とする機械学習によって構築された学習モデルと、複数の上記第2の波形を上記学習モデルに入力して上記被計測者の血圧を計測する計測部と、上記計測部によって計測された上記血圧を出力する出力部と、を備える。 【0007】 本血圧計によれば、上記被計測者の血圧に係る特徴量の時系列変化を示す第1の波形は、2以上の異なる特徴量を示す複数の第2の波形に分解される。すなわち、第2の波形の夫々は、複数の観点から第1の波形を示すものということができる。そのため、第1の波形にノイズが含まれている場合、ある特徴量に係る第2の波形に対する当該ノイズの影響が顕著であっても他の特徴量に係る第2の波形には当該ノイズの影響が少ないことも考えられる。そのため、本血圧計によれば、血圧測定アルゴリズムのパラメタ設定のためのデータ収集や測定結果のキャリブレーションを実施しなくとも可及的に高精度な血圧計測を実施できる。 【0008】 ここで、本血圧計において、上記第1の波形は、前記カフ圧の時系列変化を示すカフ圧波形を含み上記分解部は、上記カフ圧波形を2以上の異なる特徴量を示す複数の第3の波形に分解し、上記学習モデルは、上記被験者についての上記第3の波形を上記説明変数として構築され、上記計測部は、上記第3の波形を上記学習モデルに入力して上記被計測者の血圧を計測してもよい。 【0009】 また、本血圧計において、上記第1の波形は、上記カフ圧の時系列変化を基に取得される上記被計測者の脈波の時系列変化を示す脈波形を含み、上記分解部は、上記脈波形を2以上の異なる特徴量を示す複数の第4の波形に分解し、上記学習モデルは、上記被験者についての上記第4の波形を上記説明変数として構築され、上記計測部は、上記第4の波形を上記学習モデルに入力して上記被計測者の血圧を計測してもよい。 【0010】 さらに、本血圧計において、上記第1の波形は、上記カフ圧の時系列変化を示すカフ圧波形、及び、上記カフ圧の時系列変化を基に取得される上記被計測者の脈波の時系列変化を示す脈波形を含み、上記分解部は、上記カフ圧波形を2以上の異なる特徴量を示す複数の第3の波形に分解するとともに、上記脈波形を上記カフ圧の時系列変化から得られる第4の波形に分解し、上記学習モデルは、上記被験者についての上記第3の波形及び上記第4の波形を上記説明変数として構築され、上記計測部は、上記第3の波形及び上記第4の波形を上記学習モデルに入力して上記被計測者の血圧を計測してもよい。また、上記分解部は、Wave-U-Netを含んでもよい。 (【0011】以降は省略されています) この特許をJ-PlatPatで参照する




 特許ウォッチ
特許ウォッチ