TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024132255
公報種別
公開特許公報(A)
公開日
2024-09-30
出願番号
2023042966
出願日
2023-03-17
発明の名称
変速制御装置
出願人
本田技研工業株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
F16H
63/18 20060101AFI20240920BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】コストを低減しつつ車両における操作性の向上を図ること。
【解決手段】変速制御装置は、シフトドラムの回転角度を検出するドラム角度センサと、シフトペダルの荷重に応じた信号を検出する荷重センサと、ドラム角度センサの検出信号および荷重センサの検出信号に基づいて、変速段の切り替えを制御する制御部と、を備える。制御部は、閾値時間内に、荷重センサの検出信号の変換に基づいて取得したペダル荷重の変化と、ペダル荷重の方向に応じたシフトドラムの回転角度の変化と、が検出された状態で、ペダル荷重を増加させる方向に向けたシフトペダルの操作により、変速段の切り替えが要求された場合に、変速段を切り替える変速制御を実行する。
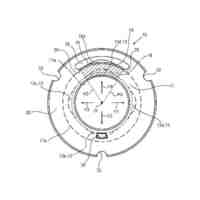
【選択図】図6
特許請求の範囲
【請求項1】
シフトペダル(63)の操作により回動されたシフトスピンドル(51)がシフトドラム(41)を回動することで、シフトフォーク(43)を介してシフターギヤを移動させることにより、変速段を切り替える変速機(31)の変速制御装置であって、
前記シフトドラム(41)の回転角度を検出するドラム角度センサ(84)と、
前記シフトペダル(63)の荷重に応じた信号を検出する荷重センサ(75)と、
前記ドラム角度センサ(84)の検出信号および前記荷重センサ(75)の検出信号に基づいて、前記変速段の切り替えを制御する制御部(80)と、を備え、
前記制御部(80)は、
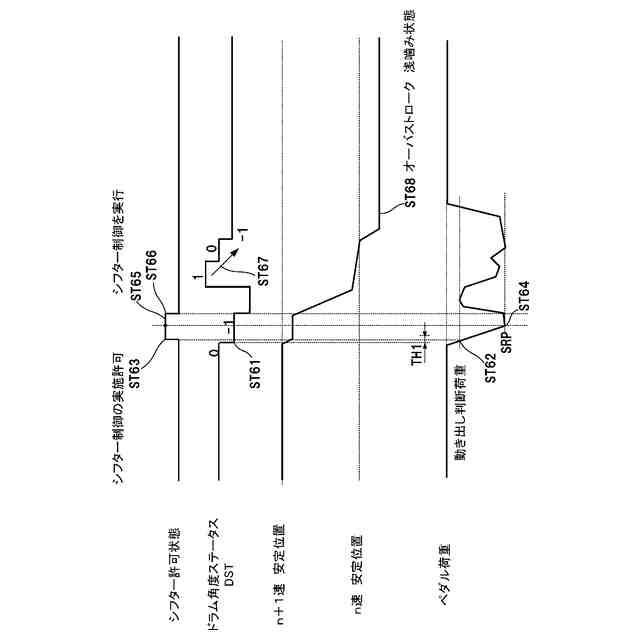
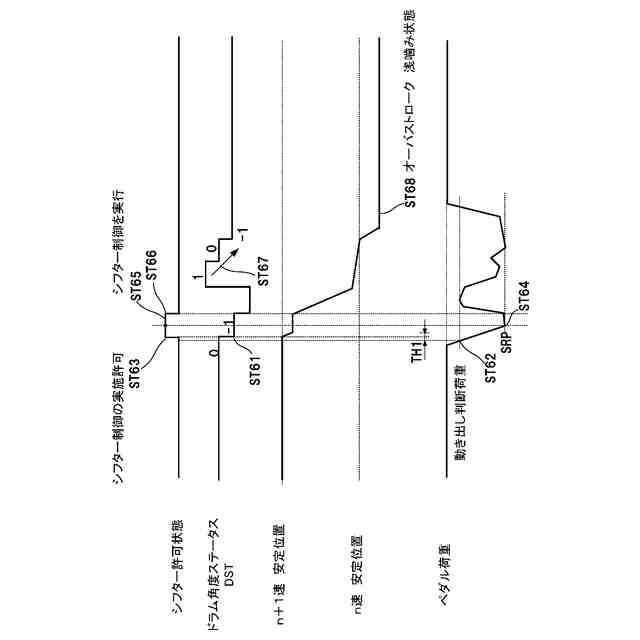
閾値時間(TH1)内に、前記荷重センサ(75)の検出信号の変換に基づいて取得したペダル荷重の変化と、前記ペダル荷重の方向に応じた前記シフトドラム(41)の回転角度の変化と、が検出された状態で、
前記ペダル荷重を増加させる方向に向けた前記シフトペダル(63)の操作により、前記変速段の切り替えが要求された場合に、前記変速段を切り替える変速制御を実行する
ことを特徴とする変速制御装置。
続きを表示(約 1,600 文字)
【請求項2】
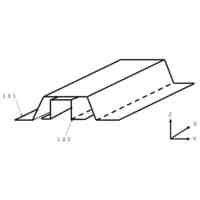
前記変速機(31)の各変速段において、安定位置とは、ドラムストッパーアームが前記シフトドラム(41)に設けられたカム形状を有する凹部に嵌ることにより、前記シフトドラム(41)を固定している位置であり、
前記制御部(80)は、前記安定位置から、前記シフトドラム(41)と前記シフトフォーク(43)との間、及び前記シフトフォーク(43)と前記シフターギヤとの間の動作方向に存在する隙間が詰まる際に回動する前記シフトドラム(41)の回転角度が閾値角度以上になった場合に、前記回転角度の変化が生じたと判定することを特徴とする請求項1に記載の変速制御装置。
【請求項3】
前記制御部(80)は、前記ペダル荷重が閾値荷重を超えた場合に、前記ペダル荷重の変化が生じたと判定することを特徴とする請求項1に記載の変速制御装置。
【請求項4】
前記制御部(80)は、
前記ペダル荷重を増加させる方向に向けた前記シフトペダル(63)の操作により生じたペダル荷重を取得し、
当該ペダル荷重が、前記変速段の切り替えを要求するシフト要求荷重(SRP)に到達した場合に、前記変速段の切り替えが要求されたと判定することを特徴とする請求項1に記載の変速制御装置。
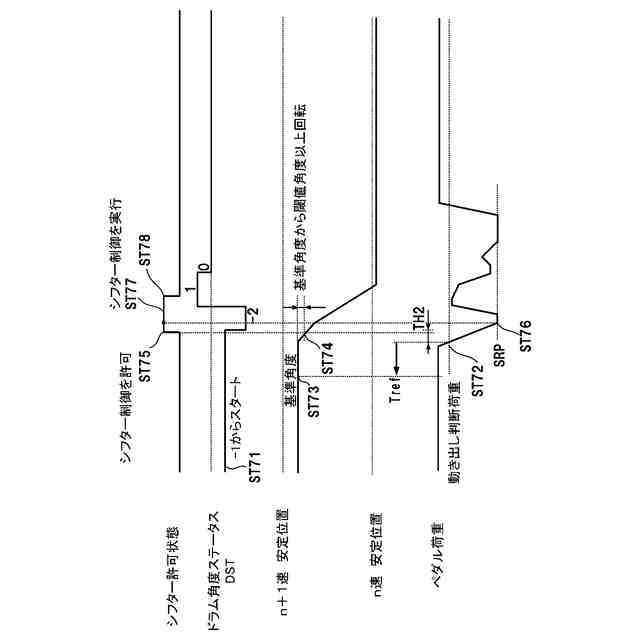
【請求項5】
前記ドラム角度センサ(84)により検出された前記シフトドラム(41)の回転角度の情報を時系列に記憶する記憶部(88)を更に備え、
前記ペダル荷重が閾値荷重を超えたと判定した際に、前記回転角度の変化が生じたと既に判定された状態である場合に、
前記制御部(80)は、
前記閾値荷重を超えたと判定した判定時点(ST72)から繰り上げた基準時間(Tref)における前記シフトドラム(41)の回転角度を、基準角度として、前記記憶部(88)から取得し、
前記判定時点(ST72)から第2の閾値時間(TH2)内に、前記シフトドラム(41)が前記基準角度から、前記閾値角度よりも小さい第2の閾値角度以上回転した場合に、前記回転角度の変化が生じたと判定することを特徴とする請求項2に記載の変速制御装置。
【請求項6】
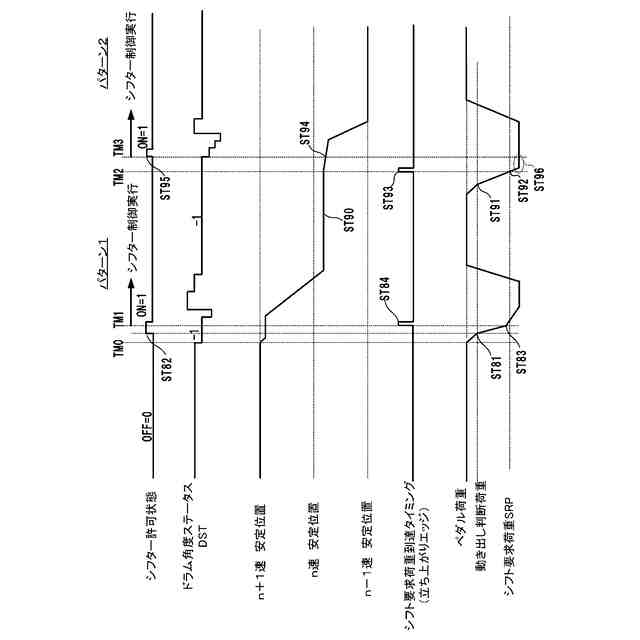
前記制御部(80)は、前記閾値時間(TH1)内に、前記ペダル荷重の変化が生じ、かつ、前記シフトドラム(41)の前記回転角度の変化が生じた場合に、前記シフトペダル(63)の操作に応じて、前記変速機(31)の変速段を切り替える変速制御を許可した許可状態に設定し、
前記変速制御を許可した状態で、前記変速段の切り替えが要求された場合に、前記変速段を切り替える変速制御を実行することを特徴とする請求項2に記載の変速制御装置。
【請求項7】
前記制御部(80)は、前記変速段の切り替えを行った後の所定時間内では、前記閾値時間(TH1)内に、前記ペダル荷重の変化と、前記シフトドラム(41)の前記回転角度の変化とが検出された場合でも、前記許可状態の設定を行わないことを特徴とする請求項6に記載の変速制御装置。
【請求項8】
前記制御部(80)は、前記シフトドラム(41)の回転角度が次の変速段との間の中間角度まで回転したことが、前記ドラム角度センサ(84)により検出された場合に、前記変速制御を許可した許可状態をリセットすることを特徴とする請求項6に記載の変速制御装置。
【請求項9】
前記制御部(80)は、前記変速機(31)の前記変速制御を開始した場合に、前記変速制御を許可した許可状態をリセットすることを特徴とする請求項6に記載の変速制御装置。
【請求項10】
前記制御部(80)は、前記シフトドラム(41)の回転角度が各変速段の前記安定位置に戻ったことが、前記ドラム角度センサ(84)により検出された場合に、前記変速制御を許可した許可状態をリセットすることを特徴とする請求項6に記載の変速制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は変速制御装置に関するものである。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、クラッチ操作をすることなく内燃機関の出力を低下させることで、ミッション伝達トルクを低減して円滑な変速段の切り替えを行えるようにする変速制御装置が開示されている。
【0003】
また、特許文献2には、内燃機関の出力を制御することでクラッチ操作無しに変速操作が可能な変速装置において、シフトスピンドルの回動を検出するシフトスピンドルセンサを用いることで、シフトスピンドルの回動を高精度に検出することができることが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2006-77623号公報
特許第6227022号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
シフトチェンジ直後にペダルがフルストロークした状態や、ペダルを完全に戻さないで再度踏み込んだ状態など、シフトペダルを踏んでも、ドラムを回転させることができない状態が生じ得る。この状態で、荷重センサの出力だけを基にシフト制御を実行すると、シフトチェンジ出来ないのに駆動力が切断されたり、駆動力が増加してしまう場合も生じ得る。ペダル荷重が高まった時点でシフトスピンドルの回転角が、安定位置付近であるならばドラムを回転させることが可能になる。そのため、確実なシフト制御を実行するには、ペダル荷重だけで無く、シフトスピンドルの回転角を検出することが必要とされる。
【0006】
本願は上記課題の解決のため、シフトスピンドルセンサを用いること無く、シフトペダルを踏んだ時にシフトチェンジか可能な状態かどうかを検知することが可能な変速制御技術の提供を目的としたものである。そして、延いてはエネルギーの効率化に寄与するものである。
【課題を解決するための手段】
【0007】
本発明の一態様の変速制御装置は、シフトペダル(63)の操作により回動されたシフトスピンドル(51)がシフトドラム(41)を回動することで、シフトフォーク(43)を介してシフターギヤを移動させることにより、変速段を切り替える変速機(31)の変速制御装置であって、
前記シフトドラム(41)の回転角度を検出するドラム角度センサ(84)と、
前記シフトペダル(63)の荷重に応じた信号を検出する荷重センサ(75)と、
前記ドラム角度センサ(84)の検出信号および前記荷重センサ(75)の検出信号に基づいて、前記変速段の切り替えを制御する制御部(80)と、を備え、
前記制御部(80)は、
閾値時間(TH1)内に、前記荷重センサ(75)の検出信号の変換に基づいて取得したペダル荷重の変化と、前記ペダル荷重の方向に応じた前記シフトドラム(41)の回転角度の変化と、が検出された状態で、
前記ペダル荷重を増加させる方向に向けた前記シフトペダル(63)の操作により、前記変速段の切り替えが要求された場合に、前記変速段を切り替える変速制御を実行する。
【発明の効果】
【0008】
本発明によれば、シフトスピンドルセンサを用いること無く、シフトペダルを踏んだ時にシフトチェンジか可能な状態かどうかを検知することが可能な変速制御技術を提供することができる。
【図面の簡単な説明】
【0009】
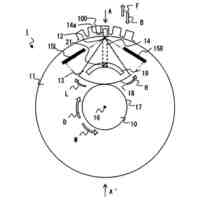
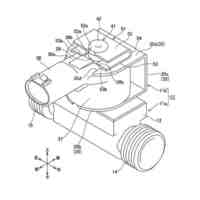
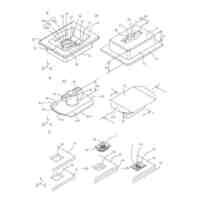
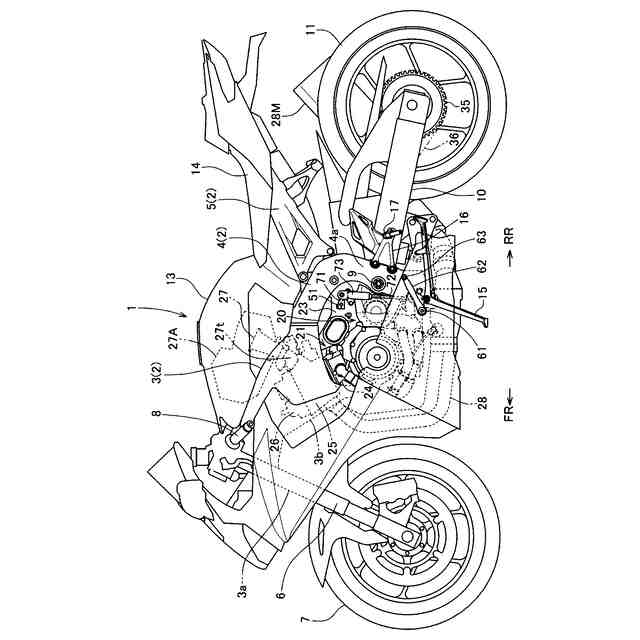
実施形態に係る車両の全体側面図。
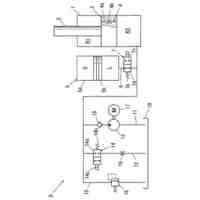
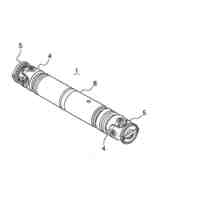
車両に搭載されたパワーユニットの一部カバーを省略した側面図。
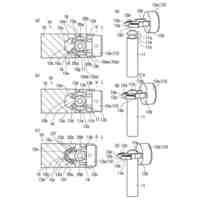
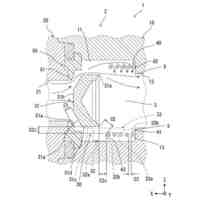
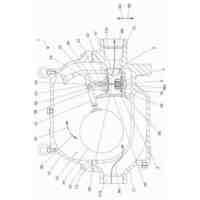
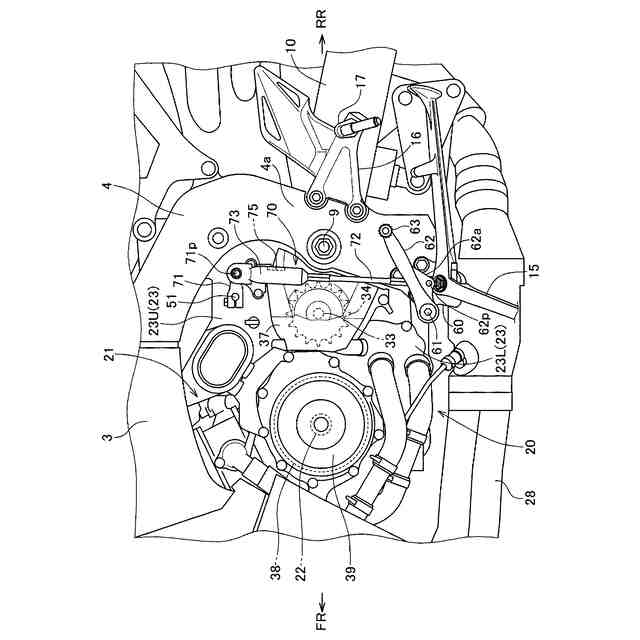
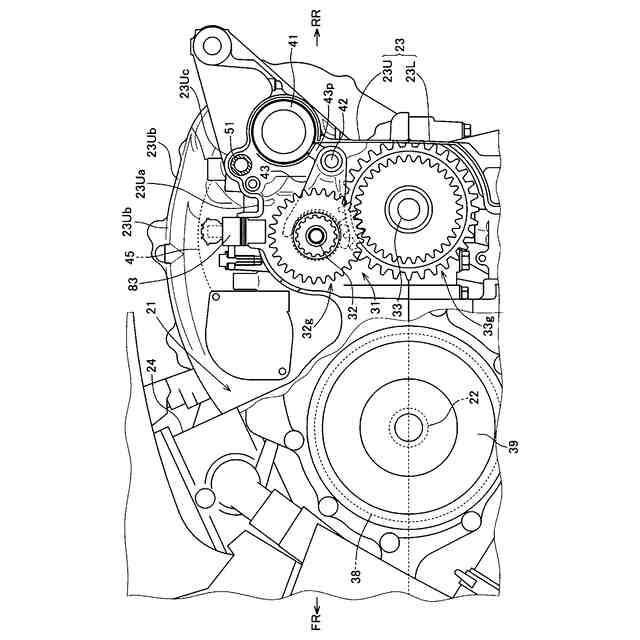
クランクケースの一部を省略して変速機を示すパワーユニットの部分側面図。
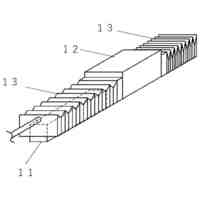
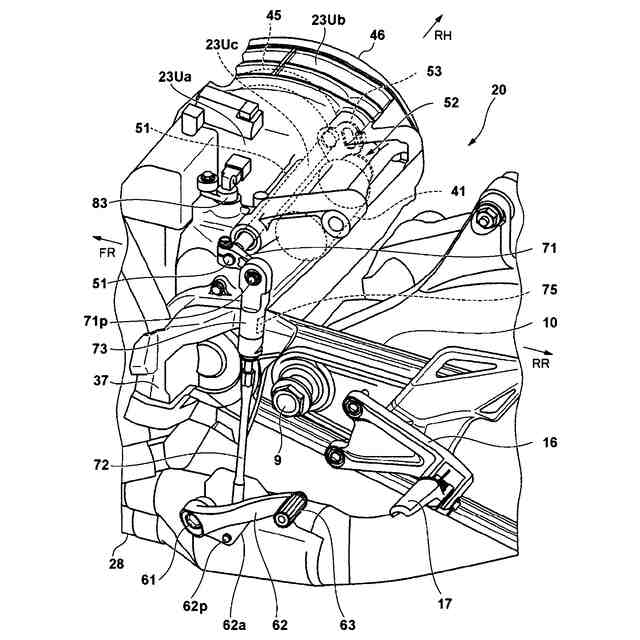
リンク機構を示すパワーユニットの要部斜視図。
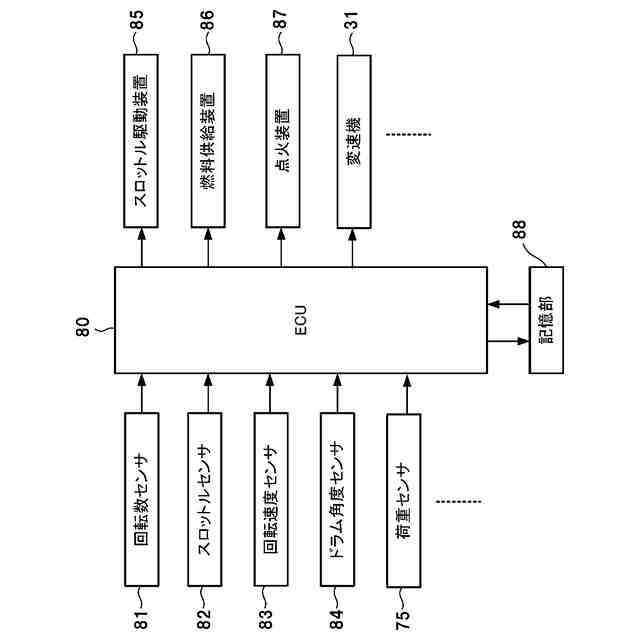
変速制御装置における制御ブロック図。
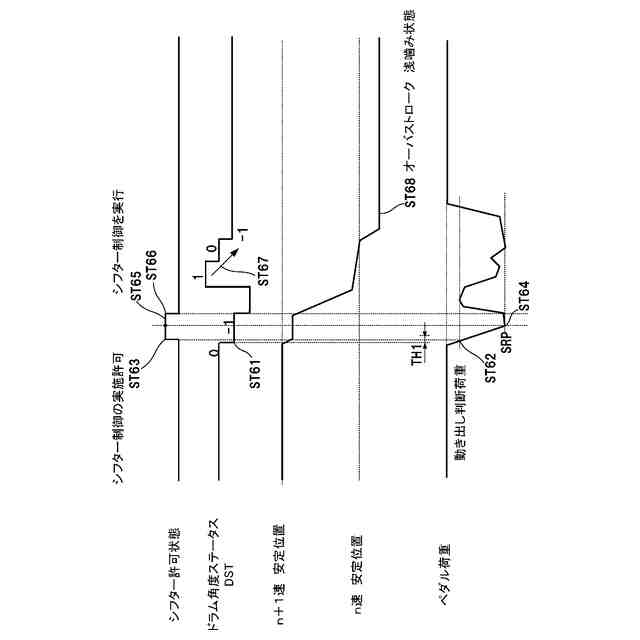
ECUによる変速制御例1を説明するタイミングチャート。
ECUによる変速制御例2を説明するタイミングチャート。
ECUによる変速制御例3を説明するタイミングチャート。
ペダル荷重が、ドラム角度ステータスよりも先に動き出し判断荷重を超える場合を例示する図。
【発明を実施するための形態】
【0010】
以下、添付図面を参照して実施形態を詳しく説明する。なお、以下の実施形態は特許請求の範囲に係る発明を限定するものではなく、また実施形態で説明されている特徴の組み合わせの全てが発明に必須のものとは限らない。実施形態で説明されている複数の特徴のうち二つ以上の特徴が任意に組み合わされてもよい。また、同一若しくは同様の構成には同一の参照番号を付し、重複した説明は省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
回転機構
4か月前
個人
回転伝達機構
2か月前
株式会社フジキン
配管
26日前
丸一株式会社
配管構造
3か月前
個人
ロックナット
1か月前
個人
ネジの緩み止め装置
4か月前
個人
弁装置
2か月前
個人
リンクプレート
2か月前
個人
アンカーボルト
5か月前
カヤバ株式会社
ダンパ
6か月前
株式会社フジキン
バルブ装置
4か月前
カヤバ株式会社
バルブ
6か月前
マフレン株式会社
自動給脂器
2か月前
株式会社テイエルブイ
自動弁
5か月前
株式会社テイエルブイ
排気弁
11日前
株式会社キッツ
管継手
2か月前
株式会社ニフコ
留め具
3か月前
カヤバ株式会社
緩衝器
3か月前
株式会社フジキン
バルブ装置
5か月前
カヤバ株式会社
緩衝器
3か月前
株式会社TOK
着脱装置
4か月前
株式会社三五
ドライブシャフト
1か月前
スズキ株式会社
防振装置
1か月前
北村精工株式会社
固定具
1か月前
株式会社不二工機
電動弁
26日前
株式会社不二工機
電磁弁
3か月前
株式会社ナジコ
自在継手
6か月前
横浜ゴム株式会社
管継手
25日前
株式会社キッツ
逆止め弁
今日
日本精工株式会社
直動案内装置
2か月前
ヒロホー株式会社
締結構造
5か月前
三和テッキ株式会社
配管固定装置
2か月前
株式会社テイエルブイ
自動弁装置
3か月前
井関農機株式会社
作業車両
6か月前
日本精工株式会社
ボールねじ装置
5か月前
帝人株式会社
衝撃吸収部材
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ