TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024120246
公報種別
公開特許公報(A)
公開日
2024-09-05
出願番号
2023026914
出願日
2023-02-24
発明の名称
作業機械の制御システム、作業機械、作業機械の制御方法、及び作業機械の遠隔操作システム
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
E02F
9/20 20060101AFI20240829BHJP(水工;基礎;土砂の移送)
要約
【課題】作業効率の低下を抑制すること。
【解決手段】作業機械の制御システムは、旋回体と、旋回体に取り付けられる作業機と、旋回体の旋回を停止可能な旋回駐車ブレーキと、旋回駐車ブレーキを作動させるために操作される旋回ロック入力装置と、旋回体及び作業機を自動制御する自動制御指令を出力する自動制御指令部と、旋回ロック入力装置の操作状態に基づいて、自動制御の可否を判定する自動許可部と、を備える。
【選択図】図7
特許請求の範囲
【請求項1】
旋回体と、
前記旋回体に取り付けられる作業機と、
前記旋回体の旋回を停止可能な旋回駐車ブレーキと、
前記旋回駐車ブレーキを作動させるために操作される旋回ロック入力装置と、
前記旋回体及び前記作業機を自動制御する自動制御指令を出力する自動制御指令部と、
前記旋回ロック入力装置の操作状態に基づいて、前記自動制御の可否を判定する自動許可部と、を備える、
作業機械の制御システム。
続きを表示(約 1,000 文字)
【請求項2】
前記自動許可部は、前記旋回ロック入力装置が操作されている状態の場合、前記自動制御を不許可とする、
請求項1に記載の作業機械の制御システム。
【請求項3】
前記自動許可部は、前記旋回ロック入力装置が操作されていない状態の場合、前記自動制御を許可する、
請求項1に記載の作業機械の制御システム。
【請求項4】
前記自動許可部は、前記旋回ロック入力装置が操作されていない状態の場合、前記自動制御を許可する
請求項2に記載の作業機械の制御システム。
【請求項5】
前記自動制御を開始するために操作される自動開始入力装置を備え、
前記自動制御指令部は、前記自動制御が許可された状態で、前記自動開始入力装置が操作された場合、前記自動制御指令を出力する、
請求項4に記載の作業機械の制御システム。
【請求項6】
掘削対象に設定された掘削目標位置を記憶する目標位置記憶部を備え、
前記自動制御指令部は、前記作業機のバケットが前記掘削目標位置に移動するように、前記自動制御指令を出力する、
請求項5に記載の作業機械の制御システム。
【請求項7】
排土対象に設定された排土目標位置を記憶する目標位置記憶部を備え、
前記自動制御指令部は、前記作業機のバケットが前記排土目標位置に移動するように、前記自動制御指令を出力する、
請求項5に記載の作業機械の制御システム。
【請求項8】
前記旋回体及び前記作業機のそれぞれを動作不可能にするために操作される動作ロック操作装置を備え、
前記自動許可部は、前記旋回ロック入力装置の操作状態及び前記動作ロック操作装置の操作状態に基づいて、前記自動制御の可否を判定する、
請求項1に記載の作業機械の制御システム。
【請求項9】
請求項1に記載の作業機械の制御システムを備える、
作業機械。
【請求項10】
旋回体の旋回を停止可能な旋回駐車ブレーキを作動するために操作される旋回ロック入力装置の操作状態を取得することと、
前記旋回ロック入力装置の操作状態に基づいて、前記旋回体及び前記旋回体に取り付けられる作業機の自動制御の可否を判定することと、を含む、
作業機械の制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械の制御システム、作業機械、作業機械の制御方法、及び作業機械の遠隔操作システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
作業機械に係る技術分野において、特許文献1に開示されているような、掘削から排土までの一連の動作が自動制御される作業機械が知られている。また、旋回駐車ブレーキを作動するために操作される旋回ロックスイッチを備える作業機械が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2021-011694号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
旋回ロックスイッチが操作された状態で作業機械の自動制御が開始されると、旋回体が旋回しない状態で作業機が動作する状況が発生する可能性がある。その結果、旋回体が旋回リリーフしながら旋回しない状態が続くこと等に起因して、作業機械の作業効率が低下する可能性がある。また、ロックレバー設定ミス、GNSS不良、各制御目標点のティーチング未設定などが起きた場合も、作業復帰に要する時間がかかり、作業効率が低下する可能性がある。
【0005】
本開示は、作業効率の低下を抑制することを目的とする。
【課題を解決するための手段】
【0006】
本開示に従えば、旋回体と、旋回体に取り付けられる作業機と、旋回体の旋回を停止可能な旋回駐車ブレーキと、旋回駐車ブレーキを作動させるために操作される旋回ロック入力装置と、旋回体及び作業機を自動制御する自動制御指令を出力する自動制御指令部と、旋回ロック入力装置の操作状態に基づいて、自動制御の可否を判定する自動許可部と、を備える、作業機械の制御システムが提供される。
【発明の効果】
【0007】
本開示によれば、作業効率の低下が抑制される。
【図面の簡単な説明】
【0008】
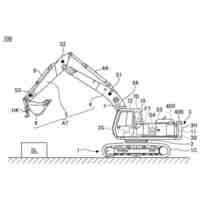
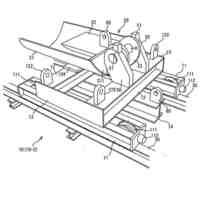
図1は、実施形態に係る作業機械を示す斜視図である。
図2は、実施形態に係る作業機械を示す模式図である。
図3は、実施形態に係る作業機械の運転室を示す図である。
図4は、実施形態に係る作業機械の動作を説明するための図である。
図5は、実施形態に係る作業機械の動作を説明するための図である。
図6は、実施形態に係るダウン旋回目標位置及びホイスト旋回目標位置を設定するティーチング処理を説明するための図である。
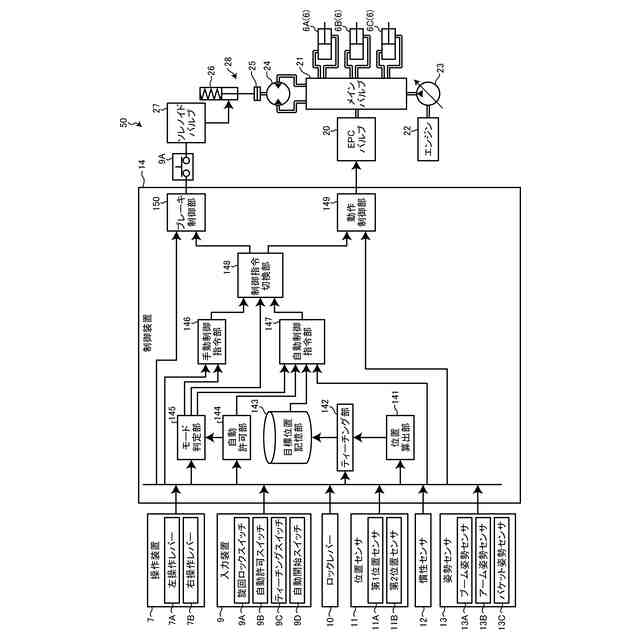
図7は、実施形態に係る作業機械の制御システムを示すブロック図である。
図8は、実施形態に係る自動制御の可否判定及び動作モードの切り換えを説明するための図である。
図9は、実施形態に係る作業機械の制御方法を示すフローチャートである。
図10は、実施形態に係るコンピュータシステムを示すブロック図である。
図11は、他の実施形態に係る作業機械の制御システムの一部を示すブロック図である。
図12は、他の実施形態に係る作業機械の制御システムの一部を示すブロック図である。
図13は、他の実施形態に係る作業機械の遠隔操作システムを示す模式図である。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
[作業機械]
図1は、実施形態に係る作業機械1を示す斜視図である。図2は、実施形態に係る作業機械1を示す模式図である。図3は、実施形態に係る作業機械1の運転室2を示す図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
大和ハウス工業株式会社
柱脚
15日前
株式会社高知丸高
仮締切構造体
17日前
住友建機株式会社
ショベル
1日前
株式会社エスイー
対土石流構造物
10日前
日本ソリッド株式会社
防舷材の保護方法
23日前
日立建機株式会社
作業機械
22日前
住友重機械工業株式会社
ショベル
3日前
住友重機械工業株式会社
作業機械
9日前
株式会社テクアノーツ
浮桟橋の係留装置
4日前
住友重機械工業株式会社
ショベル
1日前
清水建設株式会社
杭圧入機
10日前
住友重機械工業株式会社
ショベル
1日前
株式会社西原鉄工所
コンクリートブロック
25日前
株式会社テノックス
共回り監視装置
25日前
エバタ株式会社
地下構造物の浮上防止方法
15日前
コベルコ建機株式会社
電動式作業機械
2日前
西部電機株式会社
水門開閉装置
22日前
日本ソリッド株式会社
水中汚濁防止装置の展張方法
2日前
株式会社テノックス
深層混合処理工法
25日前
C技研株式会社
切削装置
25日前
鹿島建設株式会社
運搬機構および管体の搬送方法
23日前
ゼニヤ海洋サービス株式会社
通船ゲートシステム
1日前
株式会社田口クリエイト
バケット
15日前
株式会社不二越
回転継手
15日前
ジオファーム株式会社
地盤補強工法
9日前
岡部株式会社
地中排水具及び地中排水構造
1日前
岡部株式会社
地中排水具及び地中排水構造
1日前
株式会社不動テトラ
流動化砂組成物及びその製造方法。
16日前
日立建機株式会社
建設機械の油圧制御システム
25日前
株式会社笹山工業所
土壌の製造方法及び土壌の再利用方法
9日前
オリエンタル白石株式会社
仮設足場を用いた施工方法
9日前
スエヒロシステム株式会社
長尺アンカ一体型ライナー
11日前
住友重機械工業株式会社
作業機械の情報処理システム
1日前
コベルコ建機株式会社
作業機械及び搭載物の搭載方法
2日前
JFEスチール株式会社
流体供給管付き鋼管杭の回転接合方法
1日前
株式会社大林組
フェンス用基礎及びその形成方法
1日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ