TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024118955
公報種別
公開特許公報(A)
公開日
2024-09-02
出願番号
2023025575
出願日
2023-02-21
発明の名称
無人海中回収システム、管理装置、無人海中回収システムの制御方法
出願人
株式会社ドローンステーション
代理人
個人
主分類
B63C
11/48 20060101AFI20240826BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】 所定の海域の海中から指定されたターゲットを回収して持ち帰る安価な無人海中回収システムを提供すること。
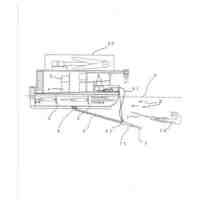
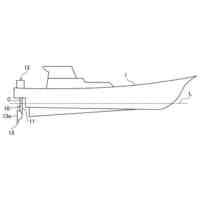
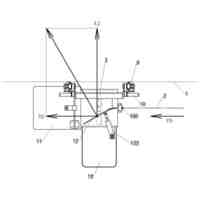
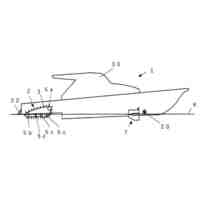
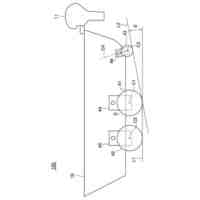
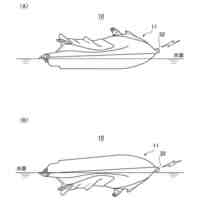
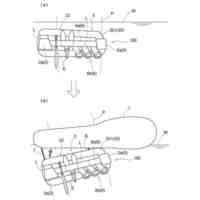
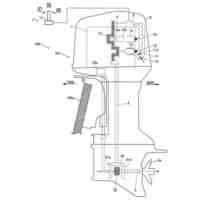
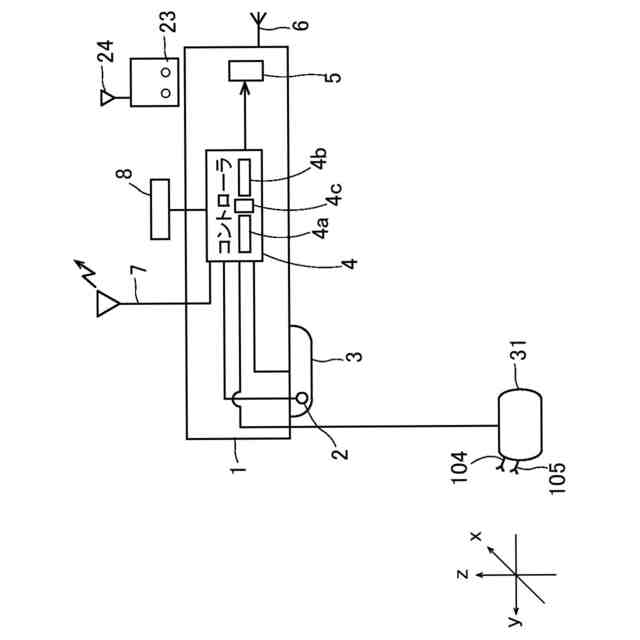
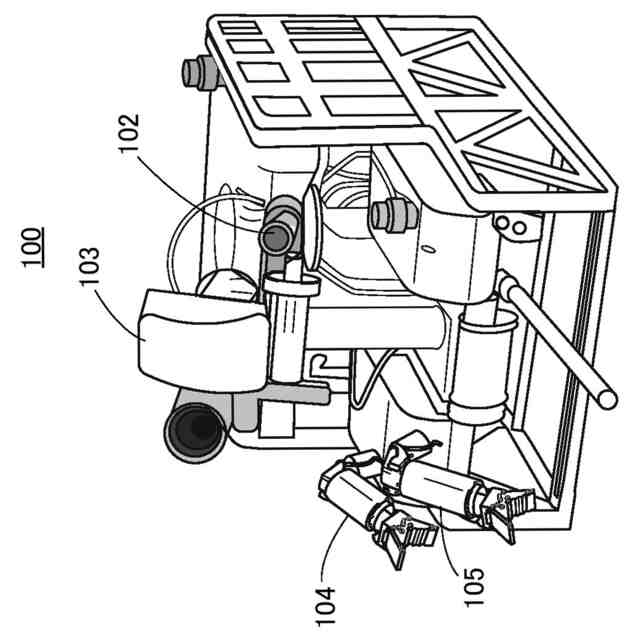
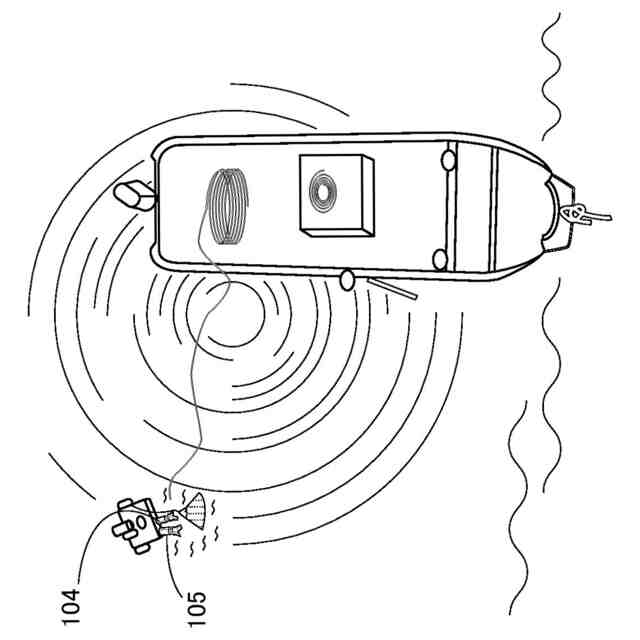
【解決手段】所定のネットワークを介してRCコントローラ23から送信される操舵信号を送受信アンテナを介して受信して航行可能な船舶1と、RCコントローラ23から送信される探査信号に基づいて海中探査を行う水中ドローン31と、船舶から送信される探査情報を処理する管理装置とが通信可能な無人海中回収システムにおいて、RCコントローラ23から送信される信号に基づいて、水中ドローン31に装備されるマニュピュレータ104,105の所作を制御するマニュピュレータ制御ステップを実行し、マニュピュレータ104,105は、海中から取得するターゲットを回収ユニットに回収させ、水中ドローン31により回収ユニットは船舶1の船上に回収する構成を特徴とする。
【選択図】 図1
特許請求の範囲
【請求項1】
所定のネットワークを介してRCコントローラから送信される操舵信号を送受信アンテナを介して受信して航行可能な船舶と、前記RCコントローラから送信される探査信号に基づいて海中探査を行う水中ドローンと、前記船舶から送信される探査情報を処理する管理装置と、が通信可能な無人海中回収システムであって、
前記船舶は、
前記RCコントローラから送信される信号に基づいて、前記船舶に装備される水中ドローンを海中へ投下するとともに、投下された前記水中ドローンを海中から回収する引揚げ/引き降ろしする手段を備え、
前記水中ドローンは、
設定された探査海底域内において、海底を撮影する海中カメラと、送受波機が配置されたソナーシステムを制御する探査制御部と、
前記RCコントローラから送信される信号に基づいて、前記水中ドローンの航行針路を制御する航行制御部と、
前記RCコントローラから送信される信号に基づいて、前記水中ドローンに装備されるマニュピュレータの所作を制御するマニュピュレータ制御部と、
を備え、
前記マニュピュレータは、海中から取得するターゲットを回収ユニットに回収させ、前記水中ドローンにより前記回収ユニットは前記船舶の船上に格納させる構成とし、
前記管理装置は、
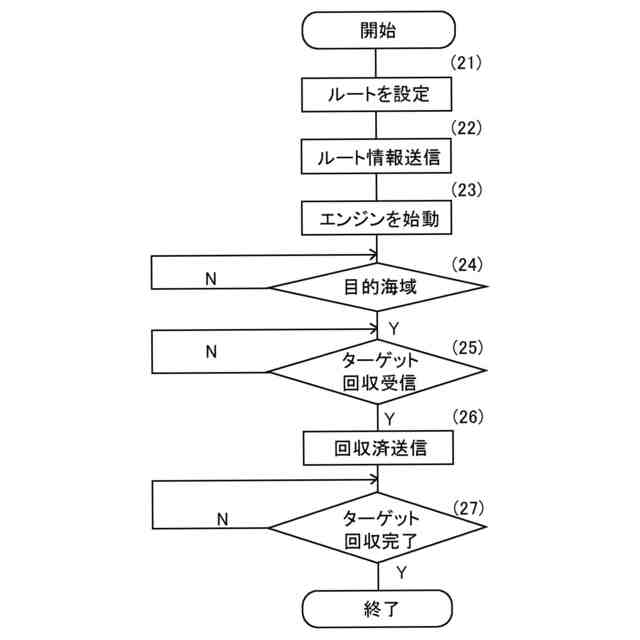
前記船舶が探査する探査海域に基づく航行ルートを設定するルート設定手段と、
前記ルート設定手段により設定された前記航行ルートを前記船舶に送信して起点港から出航させて前記探査海域まで移動航行させる第1の移動航行手段と、
前記ルート設定手段により設定された前記航行ルートにより定まる探査海域から起点港に帰還させる帰還航行ルートを前記船舶に送信して前記起点港まで帰還航行させる第2の移動航行手段と、
を備えることを特徴とする無人海中回収システム。
続きを表示(約 1,000 文字)
【請求項2】
前記探査制御部は、前記水中ドローンが備える海中カメラの撮像するビーム光源の光量を制御することを特徴とする請求項1に記載の無人海中回収システム。
【請求項3】
前記管理装置において、
前記ルート設定手段は、前記船舶が探査する探査海域の海流の変化に適応して複数の航行ルートを設定することを特徴とする請求項1に記載の無人海中回収システム。
【請求項4】
所定のネットワークを介してRCコントローラから送信される操舵信号を送受信アンテナを介して受信して航行可能な船舶と、前記RCコントローラから送信される探査信号に基づいて海中探査を行う水中ドローンと、前記船舶から送信される探査情報を処理する管理装置と、が通信可能な無人海中回収システムの制御方法であって、
前記船舶は、
前記RCコントローラから送信される信号に基づいて、前記船舶に装備される前記水中ドローンを海中へ投下するとともに、投下された前記水中ドローンを海中から回収する引揚げ/引き降ろしするステップを備え、
前記RCコントローラから送信される信号に基づいて、前記水中ドローンに装備されるマニュピュレータの所作を制御するマニュピュレータ制御ステップと、
を備え、
前記マニュピュレータは、海中から取得するターゲットを回収ユニットに回収させ、前記水中ドローンにより前記回収ユニットは前記船舶の船上に格納させる構成を特徴とする無人海中回収システムの制御方法。
【請求項5】
所定のネットワークを介してRCコントローラから送信される操舵信号を送受信アンテナを介して受信して航行可能な船舶と、前記RCコントローラから送信される探査信号に基づいて海中探査を行う水中ドローンと通信する管理装置であって、
前記船舶が探査する探査海域に基づく航行ルートを設定するルート設定手段と、
前記ルート設定手段により設定された前記航行ルートを前記船舶に送信して起点港から出航させて前記探査海域まで移動航行させる第1の移動航行手段と、
前記ルート設定手段により設定された前記航行ルートにより定まる探査海域から起点港に帰還させる帰還航行ルートを前記船舶に送信して前記起点港まで帰還航行させる第2の移動航行手段と、
を備えることを特徴とする管理装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、無線通信により船舶の航行を自動制御して装備される海底探査デバイスにより海底から探査物を回収する無人海中回収システム、管理装置、無人海中回収システムの制御方法に関するものである。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、海底地形等を調査する場合、下記特許文献1には、「ダイバーによる潜水は、簡単に実施できる反面、長時間に亘る連続調査が困難である。また、気象海象の影響を受け易く、かつ、危険を伴う場合も多いという問題点がある。
【0003】
また、水中ロボットの場合には、水中ロボット自体が高価である。しかも水中ロボットの操作に熟練を必要とし、かつ大型の母船を必要とする等、運用が大掛かりとなる。そのため、コストが高くなるという問題がある。
【0004】
さらに、起伏のある海底において、水中ロボットを海底から一定の高さを保つように移動させるには、複雑な機構と制御が必要とされ、かつその操作も複雑となる。」ことが指摘されている。
【0005】
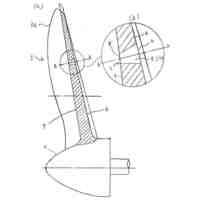
これらの課題に対して、水中航行体とし開示される下記特許文献1には、「安価で、かつ操作が容易な海底調査に利用可能な水中航行体を提供するため、本発明の水中航行体1は、先端部に係索手段9が取り付けられた細長い筒状の本体7と、本体7の係索手段9に対して反対側に位置するとともに後端部を形成する姿勢安定翼を備えた姿勢安定手段11と、本体7の水中位置を調整する調整手段5と、を具備させてなることを特徴とする。」ことが開示されている。
【0006】
また、海底調査デバイスとして、下記特許文献2には「簡易な構成により作業船による海底調査などを支援できる作業船支援方法および作業船支援システムを提供するため、作業船から作業部材とともに海中に垂下された撮像手段10により、海底または海中に敷設されている作業対象に付設されているターゲットマーク60を撮像し、得られた画像を画像処理して前記作業部材と前記作業対象とを含む仮想3次元モデルを生成し、前記仮想3次元モデルを所望方向から見た画像を生成し、それを用いて作業船の作業部材の作業対象への処理を支援するものである。」ことが開示されている。
【0007】
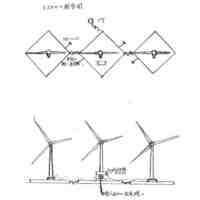
また、下記特許文献3には、水中ドローンを利用した探査を行うシステムとして、「〔0023〕水中では、複数のフロート1の下方にダイバー8とそのダイバーが操作するカメラ9とダイバー近傍に水中ドローン10が海中探索または海中遊泳している。水中ドローン10は送受信装置11を有しており、その送信素子12および受信素子13とは水面方向に向けて水中ドローン10の上部に露出して配置されている。図2は水中ドローン10を正面から見た図であり、4個のプロペラファン14、15、16、17を制御することにより上下左右への推進を行うことができる。また水平尾翼18を備えることで水平移動の安定を確保している。水中ドローン10には送受信装置11が備えられており、送信素子12および受信素子13は、ドローン10本体の上部に配置されている。
【0008】
〔0024〕この送受信装置(移動体側送受信装置)11および送受信素子12、13は、方向制御手段30により水中ドローン10の移動中であっても常時上方へ信号発信できるように制御されている。この方向制御手段30は、ジャイロコンパス方向制御により行われており、詳細は後述する。ドローン10の前面にはドローンカメラ19が配置されて水中映像をドローン側の送受信装置11より上方(水面)側へ送信できるように構成している。このドローンカメラ19は、基地局またはセンター側からのデータ信号制御により本発明による水中通信システムを利用して行われる。」ことが開示されている。
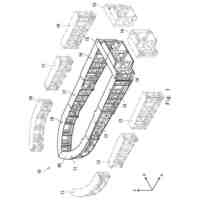
図9、図10は、港湾工事で敷設された構造体の調査例を示す図である。
【0009】
図9に示すように、海底の構造物を調査するためには、大型のクレーンを陸地側に設置し、かつ、図10に示すように、その操作位置を別所に設けるスキャナ等で水平状態を確認しながら調査する必要があった。
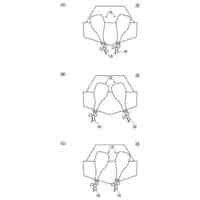
図11は、漁港のために建設された岸壁の構造を示す図である。
このような海洋構造物は、長年の使用や地震により、基礎部分に予期しない方向から力が加わり、不規則に位置が移動する場合がある。
このため、構造物の正確な位置を定期的に調査して、構造物を補強するための湾岸工事を行う場合もある。
【先行技術文献】
【特許文献】
【0010】
特開2005-206031号公報
特開2001-180579号公報
特開2022-164524号公報
【発明の概要】
【発明が解決しようとする課題】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
シーアンカー
10日前
個人
船舶用プロペラ
7か月前
個人
水難救命スーツ
8か月前
個人
水素製造船
12か月前
個人
流体抵抗低減省エネ船
5か月前
個人
浮体式洋上風力発電方式
9か月前
個人
簡易型ライフジャケット
7か月前
個人
海流発電用三胴船
10か月前
小柳建設株式会社
台船
20日前
個人
船舶推進装置
8か月前
ウラカミ合同会社
曳航ロボット
1か月前
個人
水陸両用移動装置
1か月前
ヤマハ発動機株式会社
船舶
8か月前
ダイハツ工業株式会社
ジャケット
2か月前
個人
浮体式足場のブイ組立体
7か月前
個人
キャタピラ推進式高速船
4か月前
誠加興業股分有限公司
呼吸用マスク
1か月前
ヤマハ発動機株式会社
救難艇
8か月前
個人
海洋「いかだ」上の風力発電システム
6か月前
トヨタ自動車株式会社
ガンネル治具
3か月前
ヤマハ発動機株式会社
小型船舶
9か月前
川崎汽船株式会社
ドライアイス輸送船
3か月前
ヤマハ発動機株式会社
小型船舶
9か月前
株式会社 ASC
航海用低燃費航行方法
7か月前
個人
搬送器材
6か月前
日立造船株式会社
浮体構造物
8か月前
合同会社小林知財研鑽処
海水圧リフト機構
10か月前
高階救命器具株式会社
救命具
3か月前
株式会社 神崎高級工機製作所
減速逆転機
8か月前
株式会社小野田産業
シェルタ
3か月前
サームトロン株式会社
外付けスラスタ装置
6か月前
ヤマハ発動機株式会社
船舶推進機および船舶
3か月前
個人
競艇用ターンブイ
2か月前
ヤマハ発動機株式会社
船舶推進機および船舶
10か月前
個人
水中観察ボート、曲肱システム及び動揺病軽減
3か月前
日本ソリッド株式会社
バランス機能を付与した船舶
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ