TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024118366
公報種別
公開特許公報(A)
公開日
2024-08-30
出願番号
2023024742
出願日
2023-02-20
発明の名称
遠隔操作型作業機械システム及び作業機械
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
E02F
9/20 20060101AFI20240823BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械の周囲状況及び当該機械自体の状態を確認した上で遠隔制御による作業機械の起動停止を可能とする遠隔操作型作業機械システム及び作業機械を提供する。
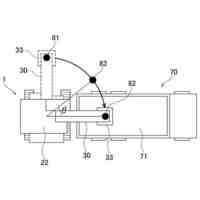
【解決手段】遠隔操作されることが可能な油圧ショベル10と油圧ショベル10を遠隔操作する遠隔操作装置70とを含む遠隔操作型作業機械システム1は、遠隔操作装置70からの遠隔操作信号に基づいて油圧ショベル10の動作制御を行うシステム制御装置としての遠隔操作信号処理装置42を有する。システム制御装置42は、遠隔操作信号が油圧ショベ10を起動させる遠隔起動操作信号又は停止させる遠隔停止操作信号の場合、油圧ショベル10の周囲検知装置46により検出された周囲情報及び姿勢検出装置45により検出された姿勢情報を取り込で原動機36の始動又は停止の可否を判定する。
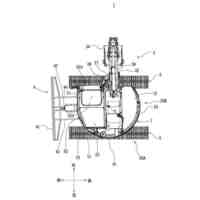
【選択図】 図3
特許請求の範囲
【請求項1】
原動機を有し遠隔操作信号の受信によって遠隔操作されることが可能な作業機械と、前記作業機械に遠隔操作信号を送信して前記作業機械を遠隔操作する遠隔操作装置と、を含む遠隔操作型作業機械システムであって、
前記作業機械は、前記作業機械の周囲状況に関する情報である周囲情報を検知する周囲検知装置と、前記作業機械の姿勢に関する情報である姿勢情報を検出する姿勢検出装置と、を含む遠隔操作型作業機械システムにおいて、
前記作業機械又は前記遠隔操作装置は、前記遠隔操作信号に基づいて前記作業機械の動作制御を行うシステム制御装置を有し、
前記システム制御装置は、
前記遠隔操作装置から送信される遠隔操作信号が前記作業機械を起動させるための遠隔起動操作信号又は前記作業機械を停止させるための遠隔停止操作信号である場合、
前記周囲検知装置及び前記姿勢検出装置により検出された前記周囲情報及び前記姿勢情報を取り込み、
前記周囲情報及び前記姿勢情報に基づいて、前記原動機の始動又は停止の可否を判定する
ことを特徴とする遠隔操作型作業機械システム。
続きを表示(約 1,900 文字)
【請求項2】
請求項1に記載の遠隔操作型作業機械システムにおいて、
前記システム制御装置は、
前記遠隔操作装置から送信される遠隔操作信号が前記遠隔起動操作信号である場合、
前記姿勢検出装置により検出された前記姿勢情報であって前記原動機の直近の停止時における前記作業機械の姿勢としての停止姿勢に関する情報を取り込むとともに、
前記周囲検知装置により検出された周囲情報に基づいて、前記作業機械の周囲の前記作業機械の起動を妨げる要因である起動阻害要因の有無を判定し、
前記起動阻害要因の有無と、前記遠隔起動操作信号を取得した際の前記作業機械の姿勢である起動姿勢と、前記作業機械の前記直近の停止姿勢と、に基づいて、前記原動機の始動の可否を判定する
ことを特徴とする遠隔操作型作業機械システム。
【請求項3】
請求項1に記載の遠隔操作型作業機械システムにおいて、
前記システム制御装置は、
前記遠隔操作装置から送信される遠隔操作信号が前記遠隔停止操作信号である場合、
前記周囲情報に基づいて、前記作業機械の周囲の前記作業機械の駐機を妨げる要因である駐機阻害要因の有無を判定し、
前記駐機阻害要因の有無と、前記姿勢情報を基に得られる前記作業機械の水平面に対する傾きと、に基づいて、前記原動機の停止の可否を判定する
ことを特徴とする遠隔操作型作業機械システム。
【請求項4】
請求項1に記載の遠隔操作型作業機械システムにおいて、
前記システム制御装置は、前記作業機械に搭載された第1制御装置と、前記遠隔操作装置に組み込まれている第2制御装置と、を有し、
前記第1制御装置は、前記周囲検知装置により検知された周囲情報及び前記姿勢検出装置により検出された姿勢情報を取り込んで前記第2制御装置に送信し、
前記第2制御装置は、
前記周囲情報及び前記姿勢情報を前記遠隔操作装置の出力装置に提示すると共に前記原動機の起動又は停止の可否の操作入力を受け付け、
当該受け付けられた操作入力が前記原動機の起動又は停止を許可する操作入力である場合には、前記第1制御装置に前記原動機の始動又は停止を実行させる
ことを特徴とする遠隔操作型作業機械システム。
【請求項5】
請求項1に記載の遠隔操作型作業機械システムにおいて、
前記作業機械は、多関節型の作業装置と、前記作業装置に掛かる負荷に関する情報である負荷情報を検出する負荷検出装置と、を備え、
前記システム制御装置は、前記原動機の停止を実行する前に、
前記負荷情報、前記周囲情報、前記姿勢情報を取り込み、
取り込んだ前記負荷情報、前記周囲情報及び前記姿勢情報に基づき、前記作業装置が作業対象物を保持しているか否かを判定し、
前記作業装置が作業対象物を保持していないと判定した場合に、前記原動機の停止を実行する前に、前記作業装置を所定の駐機姿勢に変更させる
ことを特徴とする遠隔操作型作業機械システム。
【請求項6】
請求項1に記載の遠隔操作型作業機械システムにおいて、
前記作業機械は、主電源および予備電源を搭載し、
前記作業機械は、前記原動機の停止時には前記予備電源を電力源として前記遠隔操作信号を受信する一方、前記原動機の駆動時には前記主電源を電力源として前記遠隔操作信号を受信するように構成されている
ことを特徴とする遠隔操作型作業機械システム。
【請求項7】
原動機を有し遠隔操作装置からの遠隔操作信号の受信によって遠隔操作されることが可能な作業機械であって、
前記作業機械の周囲状況に関する情報である周囲情報を検知する周囲検知装置と、前記作業機械の姿勢に関する情報である姿勢情報を検出する姿勢検出装置と、を含む作業機械において、
前記遠隔操作信号に基づいて前記作業機械の動作制御を行う制御装置を有し、
前記制御装置は、
前記遠隔操作装置から、遠隔操作信号として前記作業機械を起動させるための遠隔起動操作信号又は前記作業機械を停止させるための遠隔停止操作信号を受信した場合、
前記周囲情報及び前記姿勢情報に基づいて、前記原動機の始動又は停止の可否を判定し、
前記原動機の始動又は停止の可否の判定結果を前記遠隔操作装置に送信する
ことを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、遠隔操作により作業機械の起動及び停止の実行が可能な遠隔操作型作業機械システム及び遠隔操作による起動及び停止が可能な作業機械に関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
油圧ショベルやブルドーザなどの作業機械の中には、遠隔操作が可能なものがある。遠隔操作が可能な作業機械の中には、当該機械に作業員が搭乗して当該機械の起動や作業終了後の停止の操作を行うように構成されているものがある。このような構成の作業機械は、有害なガスが発生している場所や災害地のような人が立ち入ると危険な場所では使用することができない。しかし、このような場所で作業機械を使用したいという要求がある。
【0003】
このような要求に対して、最初のエンジン起動から作業終了後の機械停止までの作業機械に関する操縦の全てを遠隔で行う技術が提案されている(例えば、特許文献1参照)。特許文献1に記載の建設機械の遠隔制御装置においては、遠隔操縦用の送信装置から送信される建設機械の動作を制御する指令を受信する受信装置が常に給電されて能動状態に保持されており、当該受信装置は起動指令又は停止指令を受けたときに電源投入のスイッチをオン・オフするように構成されている。
【先行技術文献】
【特許文献】
【0004】
特開平10-219748号
【発明の概要】
【発明が解決しようとする課題】
【0005】
遠隔操作が可能な作業機械のうち、作業員が作業機械に搭乗して当該機械の起動及び停止の操作を行う作業機械では、当該機械の周囲の状況や当該機械自体の状態(姿勢など)を作業機械に搭乗した作業員の目視によって確認することができる。一方、特許文献1に記載の技術は、作業員が作業機械に接近することなく遠隔制御により当該機械の起動及び停止が可能であるが、遠隔制御による起動及び停止の際に作業機械の周囲の状況や当該機械自体の状態を確認する手順を示していない。
【0006】
もし、作業機械の周囲の状況や当該機械自体の状態を確認せずに遠隔制御により作業機械を停止させた場合、当該機械の停止の際の周囲の状況や機械の状態によっては、作業機械をその後起動したときに当該機械の移動が難しいことがある。この場合、作業機械の起動後から作業開始までに時間を要して作業効率が低下することがある。また、作業機械を遠隔制御により起動させようとする場合、周囲の状況や機械自体の状態によっては、作業機械による作業が難しい状態で作業機械の起動を実行しない方が好ましい場合がある。そのような場合に作業機械を起動させても、結局、無駄な操作が生じるだけで作業効率が低下する懸念がある。そのため、作業機械の起動及び停止の遠隔制御を実行するときに当該機械の周囲の状況や機械自体の状態を確認することが好ましい。
【0007】
本発明は、上述の事柄に基づいてなされたもので、その目的は、作業機械の周囲の状況及び当該機械自体の状態を確認した上で遠隔制御による作業機械の起動及び停止を可能とする遠隔操作型作業機械システム及び作業機械を提供することである。
【課題を解決するための手段】
【0008】
本願は、上記課題を解決する手段を複数含んでいる。その一例を挙げるならば、原動機を有し遠隔操作信号の受信によって遠隔操作されることが可能な作業機械と、前記作業機械に遠隔操作信号を送信して前記作業機械を遠隔操作する遠隔操作装置と、を含む遠隔操作型作業機械システムであって、前記作業機械は、前記作業機械の周囲状況に関する情報である周囲情報を検知する周囲検知装置と、前記作業機械の姿勢に関する情報である姿勢情報を検出する姿勢検出装置と、を含む遠隔操作型作業機械システムにおいて、前記作業機械又は前記遠隔操作装置は、前記遠隔操作信号に基づいて前記作業機械の動作制御を行うシステム制御装置を有し、前記システム制御装置は、前記遠隔操作装置から送信される遠隔操作信号が前記作業機械を起動させるための遠隔起動操作信号又は前記作業機械を停止させるための遠隔停止操作信号である場合、前記周囲検知装置及び前記姿勢検出装置により検知された前記周囲情報及び前記姿勢情報を取り込み、前記周囲情報及び前記姿勢情報に基づいて、前記原動機の始動又は停止の可否を判定することを特徴とする。
【発明の効果】
【0009】
本発明によれば、遠隔操作装置の起動・停止の遠隔操作信号に対して、原動機の始動・停止を実行する前に、周囲検知装置により検知された周囲情報及び姿勢検出装置により検出された姿勢情報に基づく原動機の始動・停止の可否の判定を行うので、作業機械の周囲の状況及び当該機械自体の状態を確認した上で遠隔制御による作業機械の起動・停止の実行が可能である。
上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0010】
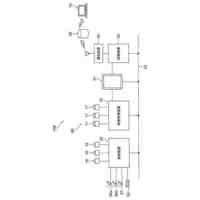
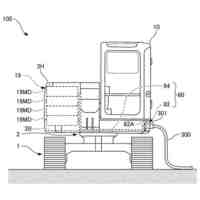
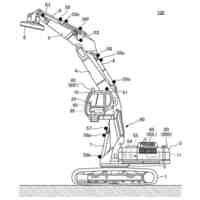
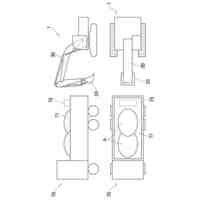
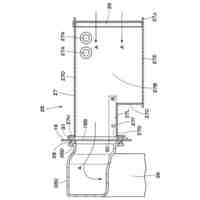
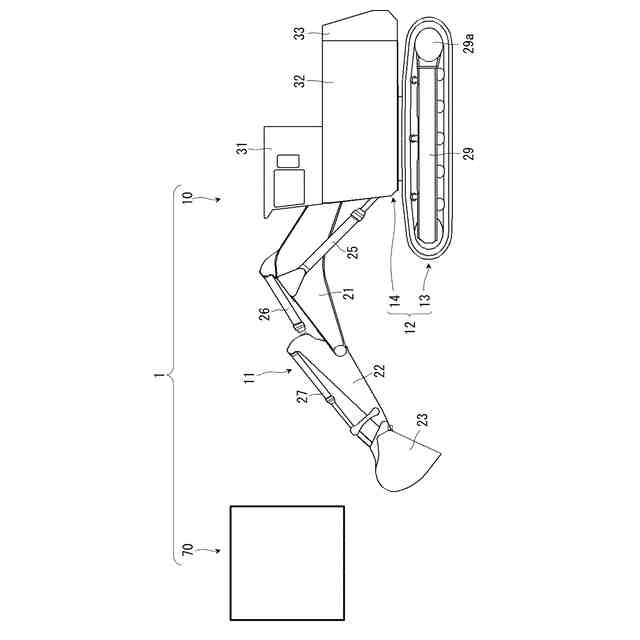
本発明の第1の実施形態に係る遠隔操作型作業機械システムを構成する遠隔操作装置及び作業機械の一例としての油圧ショベルを示す概略図である。
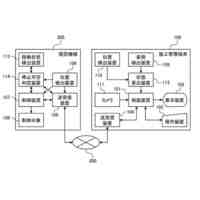
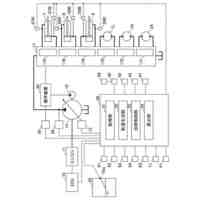
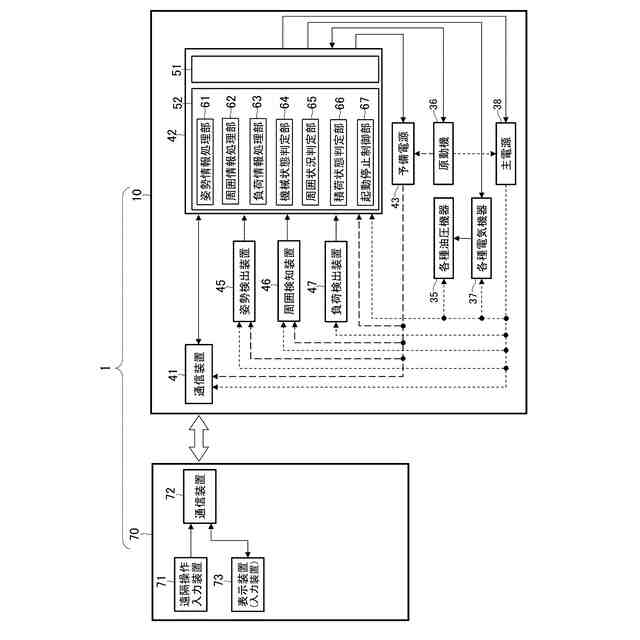
第1の実施形態に係る遠隔操作型作業機械システムにおける遠隔操作装置及び作業機械の構成を示すブロック図である。
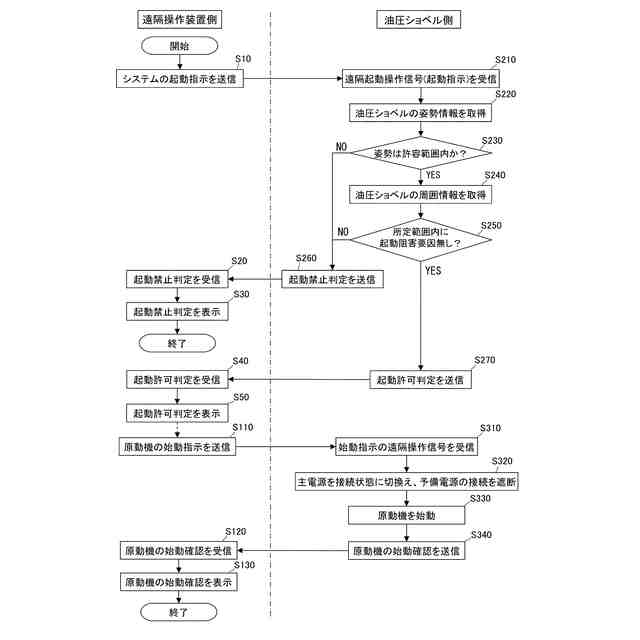
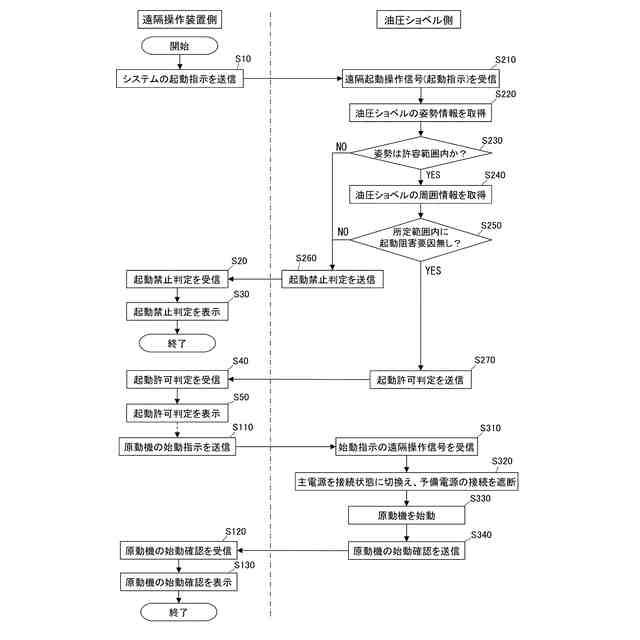
図2に示す第1の実施形態に係る遠隔操作型作業機械システムにおける作業機械の遠隔起動の制御手順の一例を示すフローチャートである。
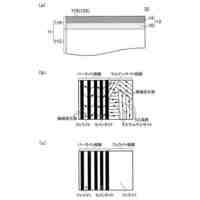
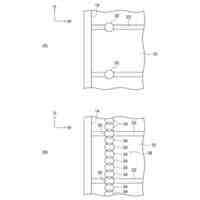
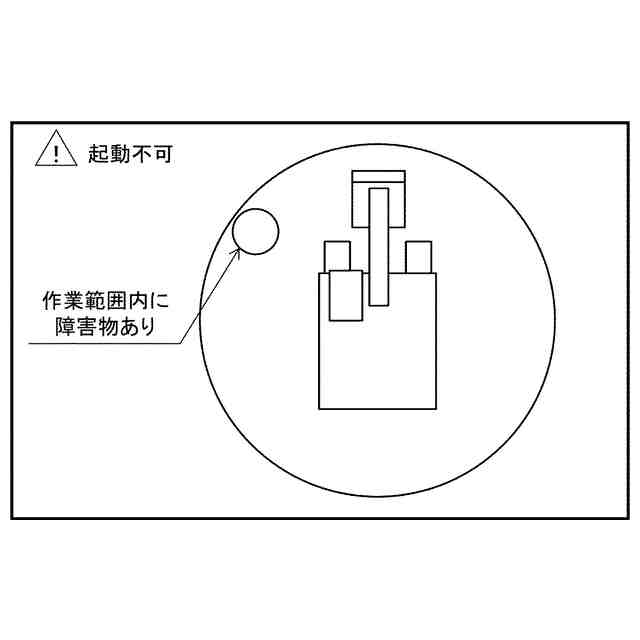
図3に示す第1の実施形態に係る遠隔操作型作業機械システムの遠隔起動の制御手順のうちの起動禁止判定の表示画面を示す図である。
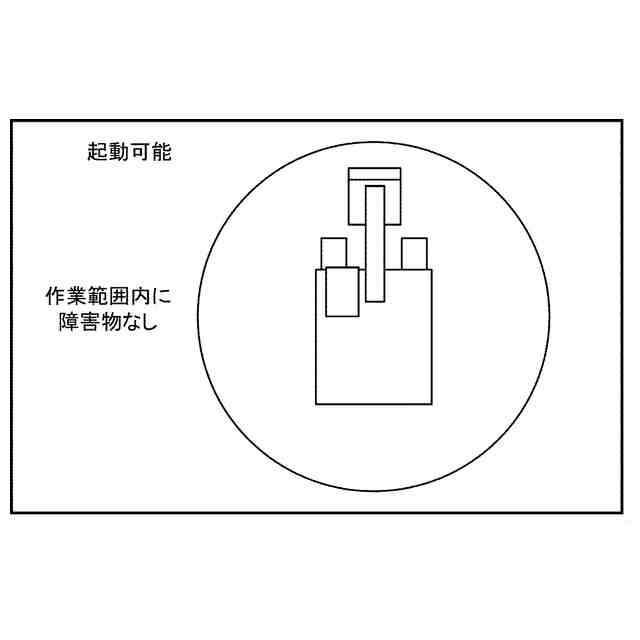
図3に示す第1の実施形態に係る遠隔操作型作業機械システムの遠隔起動の制御手順のうちの起動許可判定の表示画面を示す図である。
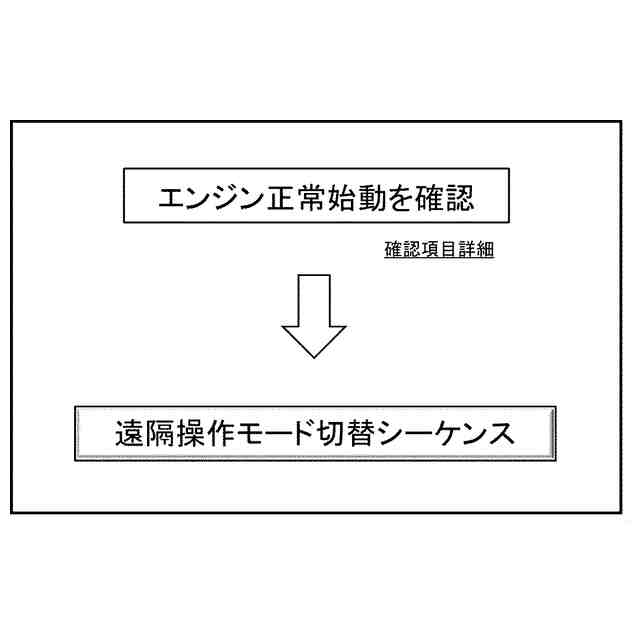
図3に示す第1の実施形態に係る遠隔操作型作業機械システムの遠隔起動の制御手順のうちの原動機の始動確認の表示画面を示す図である。
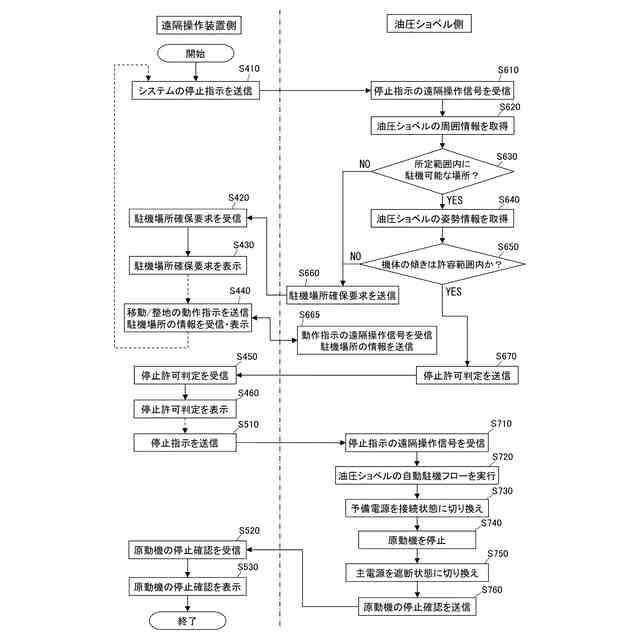
図2に示す第1の実施形態に係る遠隔操作型作業機械システムにおける作業機械の遠隔停止の制御手順の一例を示すフローチャートである。
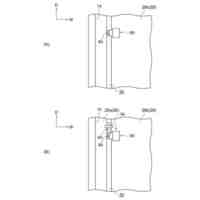
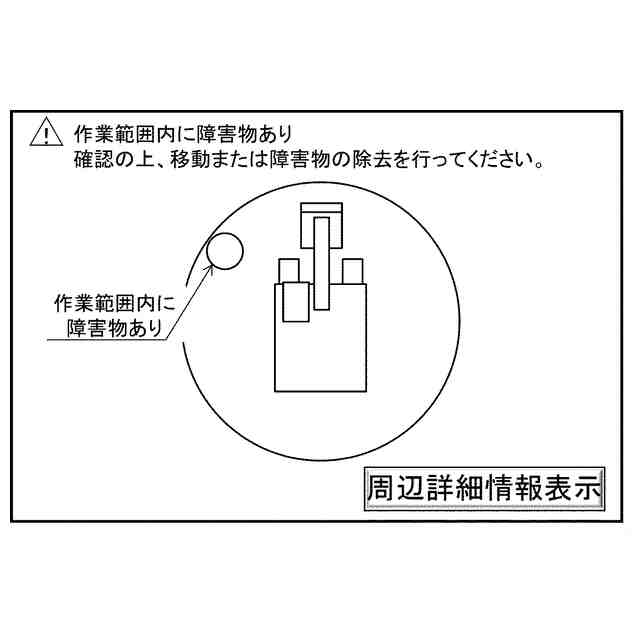
図7に示す第1の実施形態に係る遠隔操作型作業機械システムの遠隔停止の制御手順のうちの周囲状況判定による駐機場所確保指示の表示画面を示す図である。
図7に示す第1の実施形態に係る遠隔操作型作業機械システムの遠隔停止の制御手順のうちの機体状態判定による駐機場所確保指示の表示画面を示す図である。
図7に示す第1の実施形態に係る遠隔操作型作業機械システムの遠隔停止の制御手順のうちの原動機の停止確認の表示画面を示す図である。
図7に示す第1の実施形態に係る遠隔操作型作業機械システムの遠隔停止の制御手順のうちの自動駐機の詳細な制御手順の一例を示すフローチャートである。
本発明の第2の実施形態に係る遠隔操作型作業機械システムにおける遠隔操作装置及び作業機械の構成を示すブロック図である。
図12に示す第2の実施形態に係る遠隔操作型作業機械システムにおける作業機械の遠隔起動の制御手順の一例を示すフローチャートである。
図12に示す第2の実施形態に係る遠隔操作型作業機械システムにおける作業機械の遠隔停止の制御手順の一例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業車両
22日前
日立建機株式会社
作業機械の稼働現場管理システム
1か月前
日立建機株式会社
窒化鋼部品及び窒化鋼部品の製造方法
2か月前
日立建機株式会社
建設機械の動作制御システム
1か月前
個人
エア津波緩衝装置
1か月前
個人
指示装置
1か月前
鹿島建設株式会社
接合構造
1か月前
株式会社不二越
建設機械
1か月前
株式会社クボタケミックス
桝蓋
1か月前
住友建機株式会社
ショベル
28日前
住友建機株式会社
ショベル
1か月前
株式会社ジェック
水流方向切替装置
今日
コベルコ建機株式会社
作業機械
1か月前
住友重機械工業株式会社
作業機械
1か月前
個人
鋼管杭とその製造方法
1か月前
住友重機械工業株式会社
作業機械
7日前
住友重機械工業株式会社
作業機械
1か月前
鹿島建設株式会社
建込み方法
20日前
株式会社フジタ
建築物とその施工方法
1か月前
コベルコ建機株式会社
作業機械
1か月前
コベルコ建機株式会社
作業機械
1か月前
千代田工営株式会社
杭と上部構造物との接合構造
1か月前
住友重機械工業株式会社
作業機械の制御装置
1か月前
ジーネットワーク株式会社
低空頭FRP.Tube合成杭
29日前
個人
アンカーボルト支持装置
29日前
スーパーレジンクラフト株式会社
防塵板付消波装置
28日前
ヤンマーホールディングス株式会社
作業機械
1か月前
日鉄建材株式会社
透過型砂防堰堤の設計方法
今日
日立建機株式会社
作業車両
22日前
三陽機器株式会社
作業機の作業部連結構造
22日前
株式会社JAST
鋼管杭撤去装置
1か月前
株式会社竹中工務店
山留め工法
1か月前
株式会社日立建機ティエラ
建設機械
今日
株式会社竹中工務店
山留め工法
1か月前
日特建設株式会社
基盤材処理システム
1か月前
清水建設株式会社
道路に対する液状化対策構造
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ