TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024117772
公報種別
公開特許公報(A)
公開日
2024-08-29
出願番号
2024081991,2024518674
出願日
2024-05-20,2022-09-26
発明の名称
トレーラ及びコンテナから製品を荷降ろし/荷広げするロボットトラックアンローダのための認識ベースロボット操作システム及び方法
出願人
ダイフク イントラロジスティクス アメリカ コーポレーション
,
株式会社ダイフク
代理人
弁理士法人RYUKA国際特許事務所
主分類
B65G
67/24 20060101AFI20240822BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
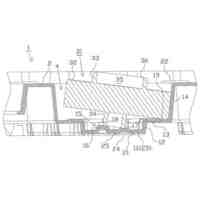
【課題】移動ベース構造は、駆動サブアセンブリ、搬送サブアセンブリ、産業用ロボット、旋回前方コンベア、距離測定サブアセンブリ、及び制御サブアセンブリのための支持フレームワークを提供する。
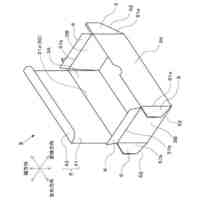
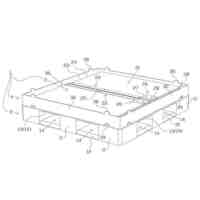
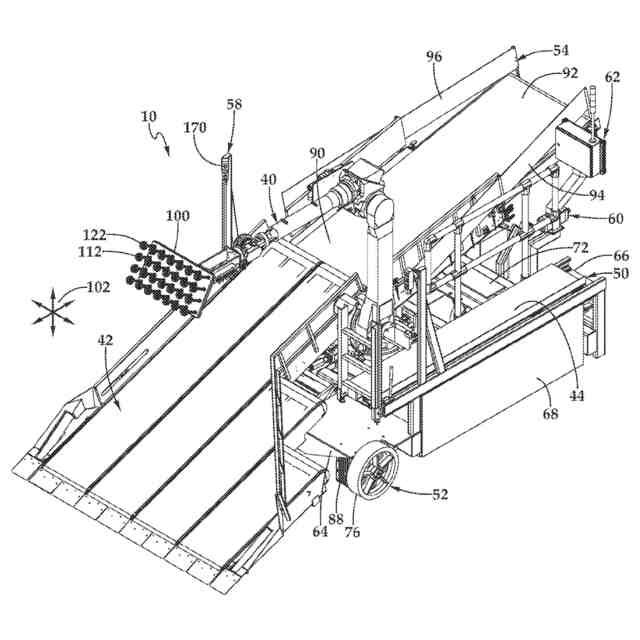
【解決手段】移動ベース(50)構造は、駆動サブアセンブリ(52)、搬送サブアセンブリ(54)、産業用ロボット(40)、旋回前方コンベア(42)、距離測定サブアセンブリ、及び制御サブアセンブリ(62)のための支持フレームワークを提供する。制御サブアセンブリ(62)は、認識ベースロボット操作システムに基づいて、産業用ロボット(40)の選択的な関節動作による移動及び旋回前方コンベア(42)、及び、駆動サブアセンブリ(52)の作動を協調させる。ロボットトラックアンローダ(10)は、産業用ロボット(40)及び旋回前方コンベア(42)を利用して、選び取り及びすくい上げ動作を実行する。自動エラー処理も提供される。
【選択図】図2A
特許請求の範囲
【請求項1】
複数の製品を荷降ろし/荷広げするためのロボットトラックアンローダであって:
第1及び第2端を有する移動ベースの構造;
前記移動ベースに連結されている駆動サブアセンブリ、前記駆動サブアセンブリは、前記移動ベースをステアリング及び駆動するための複数の車輪を含み;
前記移動ベース上に配設された搬送サブアセンブリ、前記搬送サブアセンブリは、前記第1端及び前記第2端の間で前記複数の製品を運搬するよう構成されている動力付き運搬経路を含み;
前記移動ベースの前記第2端の近くに配設されている産業用ロボット、前記産業用ロボットは、前記複数の製品を処理するよう構成されており、前記産業用ロボットはロボット到達可能空間を有し;
カメラ;
前記移動ベースの前記第2端に配設された旋回前方コンベア、前記旋回前方コンベアは、それに統合されたデッキコンベアユニットを有し、前記デッキコンベアユニットは、前記複数の製品を前記搬送サブアセンブリに運搬するよう構成されており、前記旋回前方コンベアは、前記複数の製品を処理するよう構成されており;
前記デッキコンベアユニットは複数のコンベアサブアセンブリを含み;
前記産業用ロボット、前記カメラ、前記旋回前方コンベア、及び前記デッキコンベアユニットと通信するように配置されている制御サブアセンブリ、前記制御サブアセンブリは、前記産業用ロボットの選択的な関節動作する移動を協調させ、前記制御サブアセンブリは、前記旋回前方コンベアの選択的な関節動作する移動を協調させ、前記制御サブアセンブリは、前記デッキコンベアユニットの前記複数のコンベアサブアセンブリの各々の選択的作動を協調させ;及び
前記制御サブアセンブリは、プロセッサからアクセス可能なメモリを含み、前記メモリは、実行されたとき、前記プロセッサに:
前記旋回前方コンベア上に位置する処理中の製品を識別するために前記カメラを介して前記旋回前方コンベア内の探索動作を指定させ、及び
前記処理中の製品が前記旋回前方コンベア上に位置することに応じて、自動エラー処理動作を指定させ、前記自動エラー処理動作は、前記産業用ロボットを介する、前記旋回前方コンベア上の前記処理中の製品の選択的な処理を含む、
プロセッサ実行可能命令を含む、
を備えるロボットトラックアンローダ。
続きを表示(約 1,500 文字)
【請求項2】
前記旋回前方コンベアは、前記ロボットトラックアンローダに対する旋回、伸長、及び後退の各々のために、前記ロボットトラックアンローダに固定的に固定されている、請求項1に記載のロボットトラックアンローダ。
【請求項3】
前記旋回前方コンベアは更に:
前記移動ベースの前記第2端に固定されたフレーム、前記フレームは非柔軟である;
前記フレームに接続された後方部分、及び、第1及び第2側面の間の横軸A
T
に沿って前記後方部分からある長さにわたって延在する前方部分を示す平面状延長ブレード;
前記平面状延長ブレードは、圧力が印加されることに応じて、前記横軸A
T
の周りに曲がる、
を備える、請求項1に記載のロボットトラックアンローダ。
【請求項4】
前記自動エラー処理動作は更に、前記処理中の製品の下の前記旋回前方コンベアの振動を含む、請求項1に記載のロボットトラックアンローダ。
【請求項5】
前記プロセッサ実行可能命令は、実行されるとき、前記プロセッサに、前記処理中の製品が前記旋回前方コンベア上に位置することに応じて、自動エラー処理動作を指定させ、実行されるとき、前記プロセッサに、前記処理中の製品が前記旋回前方コンベア上に位置することに応じて、前記複数のコンベアサブアセンブリのうちの少なくとも1つを前向き及び逆向きに選択的に交互に切り替えるための命令動作を指定させるプロセッサ実行可能命令を更に含む、請求項1に記載のロボットトラックアンローダ。
【請求項6】
前記プロセッサ実行可能命令は、実行されるとき、前記プロセッサに、前記処理中の製品が前記旋回前方コンベア上に位置することに応じて、自動エラー処理動作を指定させ、実行されるとき、前記プロセッサに、前記処理中の製品が前記旋回前方コンベア上に位置することに応じて、前記旋回前方コンベアを選択的に上及び下に移動させるための命令動作を指定させるプロセッサ実行可能命令を更に含む、請求項1に記載のロボットトラックアンローダ。
【請求項7】
実行されるとき、前記プロセッサに、前記探索動作を指定する前に:
前記旋回前方コンベアを用いて前記複数の製品を荷降ろしするために深いすくい上げ撤去動作を指定させ、及び
前記旋回前方コンベアを用いて前記複数の製品を荷降ろしするために浅いすくい上げ撤去動作を指定させる、
プロセッサ実行可能命令を更に含む、請求項1に記載のロボットトラックアンローダ。
【請求項8】
実行されるとき、前記プロセッサに、前記産業用ロボットを用いて前記複数の製品を荷降ろしするために撤去動作を指定させるプロセッサ実行可能命令を更に備える、請求項1に記載のロボットトラックアンローダ。
【請求項9】
前記旋回前方コンベアを監視するように位置する複数のセンサを更に備え、前記複数のセンサは、前記制御サブアセンブリと通信するように配置されている、請求項1から8のいずれか一項に記載のロボットトラックアンローダ。
【請求項10】
実行されるとき、前記プロセッサに、前記旋回前方コンベア上に配置されている処理中の製品を識別するために、前記複数のセンサを介して、前記旋回前方コンベア内の探索動作を指定させる前記プロセッサ実行可能命令は、実行されるとき、前記プロセッサに、前記複数のセンサを利用して、前記旋回前方コンベア上に配置された前記処理中の製品を識別させる、プロセッサ実行可能命令を更に備える、請求項9に記載のロボットトラックアンローダ。
発明の詳細な説明
【技術分野】
【0001】
本発明は一般に、製品を処理するための機械に関し、より具体的には、小包又は箱などの製品をトレーラ及びコンテナから荷降ろし(unloading)及び荷広げ(unpacking)するよう設計されたロボットトラックアンローダを採用する、自動化された荷降ろし及び荷広げのための認識ベースロボット操作システム及び方法に関する。
続きを表示(約 5,300 文字)
【背景技術】
【0002】
ローディングドック及びローディングベイは、大きい商業及び工業の建物において一般に見られ、トラック及びバンによって持ち運ばれる又は持ち去られる大きい荷物のための到着及び出発場所を提供する。例として、トラックは、ローディングベイのバンパがトレーラ上のバンパと接触し、ローディングベイ及びトラックの間に間隙が生成されるように、ローディングベイ内へ後退し得る。ドックレベラ又はドックプレートがトラック及び倉庫の間の間隙の橋渡しを行い、固定された実質的に水平な表面を提供する。次に、フォークリフト又はコンベアベルトなどの動力付き移動機器を利用して、倉庫からトラックへ積荷を運搬する。次に、人間の労働力により、トラック内の積荷を撤去する。これは特に、例えばトラック又は貨物コンテナからの箱又はケースなどの製品の荷降ろしに当てはまる。これらのシステムは、荷降ろしされる積荷の量を最大化する一方で、従業員を保護すること及び従業員の寿命を延ばすことの両方のために、人間の労働力の使用を最小化するよう設計されている。しかしながら、人間の労働力の削減は困難であることが分かっている。なぜなら、トラック又は貨物コンテナにおける箱の構成及びサイズを事前に容易に予測できないからである。したがって、トレーラ及びコンテナからケース及び箱などの製品を荷降ろし又は荷広げするときの人間の労働力の使用を更に削減する、改善されたトラック荷降ろしシステムの必要性が依然として存在する。
【発明の概要】
【0003】
人間の労働力を最小限に使用して又は使用することなく、トレーラ又はコンテナから完全に荷降ろしすることを可能にし、それにより、トラックから荷降ろしする時間及び人的資本の必要性を最小化する、小包又は箱などの製品の自動化された荷降ろし及び荷広げのためのシステム及び方法を実現することは有益であろう。また、変動するサイズの小包及び箱をトレーラ及び類似のコンテナから迅速に荷降ろし及び取降ろしすることによって、この問題、特に認識の課題に対処するロボットコンピュータベースの解決手段を可能にすることが望ましい。これらの懸念の1又は複数により良く対処するべく、一実施形態において、トレーラ及びコンテナから箱又はケースなどの製品を荷降ろし/荷広げするためのロボットトラックアンローダが開示されている。移動ベース構造は、駆動サブアセンブリ、搬送サブアセンブリ、産業用ロボット、旋回前方コンベア、例えばカメラを含み得る距離測定サブアセンブリ、及び制御サブアセンブリのための支持フレームワークを提供する。制御サブアセンブリは、認識ベースロボット操作システムに基づいて、産業用ロボットの選択的な関節動作による移動及び旋回前方コンベア、及び、駆動サブアセンブリの作動を協調させる。ロボットトラックアンローダは、産業用ロボット及び旋回前方コンベアを利用して、選び取り及びすくい上げ動作を実行する。自動エラー処理も提供される。
【0004】
一態様において、製品を荷降ろし/荷広げするためのロボットトラックアンローダは、駆動サブアセンブリ及び搬送サブアセンブリが固定された移動ベース構造を含む。産業用ロボット及び旋回前方コンベアは移動ベース上に配設されている。制御サブアセンブリは、産業用ロボット及び旋回前方コンベアの各々の選択的な関節動作による移動を協調させるために、産業用ロボット、旋回前方コンベア及び認識サブシステムと通信するように配置されている。プロセッサからアクセス可能なプロセッサ実行可能命令を有するメモリを含む制御サブアセンブリは、認識サブシステムが、環境から収集されたデータから探索可能空間を構築することを可能にする。探索可能空間は、候補製品接触面を決定するために探索される。ロボットトラックアンローダは次に、産業用ロボット及び旋回前方コンベアを使用する選び取り及びすくい上げ動作により製品を荷降ろしするために撤去動作を指定する。選び取り及びすくい上げ動作の選び取り部分は、例えば、掴むこと及び引くことを含み得る。ロボットトラックアンローダはまた、旋回前方コンベアを探索して旋回前方コンベア上に配置されたまま残っている処理中の製品を識別すること、及び、処理中の製品を処理ことにすることによって、自動エラー処理を実行する。
【0005】
別の態様において、製品を荷降ろし/荷広げするためのロボットトラックアンローダは、駆動サブアセンブリ及び搬送サブアセンブリが固定された移動ベース構造を含む。フレームを有する旋回前方コンベアが、移動ベース上に配設され、製品を処理するよう構成されている。旋回前方コンベアは、フレーム内に統合されたデッキコンベアユニットを含む。後方部分を示す平面状延長ブレードがフレームに接続されている。平面状延長ブレードは、第1及び第2側面の間の横軸に沿って後方部分からある長さにわたって延在する前方部分を有し得る。平面状延長ブレードは、印加された圧力に応じて、横軸を中心に曲がる。制御サブアセンブリは、産業用ロボット及び旋回前方コンベアの各々の選択的な関節動作による移動を協調させるために旋回前方コンベア及び認識サブシステムと通信するように配置され得る。プロセッサからアクセス可能なプロセッサ実行可能命令を有するメモリを含む制御サブアセンブリは、ロボットトラックアンローダが、カメラから収集されたデータ画像から探索可能空間を構築し、候補製品接触面を決定するために探索可能空間を探索し、旋回前方コンベアを用いて複数の製品を荷降ろしするために撤去動作を指定することを可能にする。
【0006】
更なる態様において、製品を荷降ろし/荷広げするためのロボットトラックアンローダは、駆動サブアセンブリ及び搬送サブアセンブリが固定された移動ベース構造を含む。産業用ロボット及び旋回前方コンベアは移動ベース上に配設されている。制御サブアセンブリは、産業用ロボット及び旋回前方コンベアの各々の選択的な関節動作による移動を協調させるために、産業用ロボット、旋回前方コンベア及び認識サブシステムと通信するように配置され得る。前に言及されたように、制御サブアセンブリは、プロセッサからアクセス可能なプロセッサ実行可能命令を有するメモリを含み、ロボットトラックアンローダが、距離測定サブアセンブリによって収集されたデータ画像から探索可能空間を構築することを可能にする。探索可能空間は、候補製品接触面を決定するために探索される。ロボットトラックアンローダは次に、産業用ロボットが前景壁(foreground wall)から製品の一部をクリア(clear)し、次に、製品をすくい上げる撤去動作を指定し得る。より具体的には、ロボットトラックアンローダは次に、産業用ロボットを用いた選び取り、それに続く、旋回前方コンベアによる2つのすくい上げ、浅いすくい上げ及び深いすくい上げを指定することによって、産業用ロボット及び旋回前方コンベアを使用する選び取り及びすくい上げ動作を用いて製品を荷降ろしするために撤去動作を指定し得る。一般に、産業用ロボットは、製品の上側部分に対してクリアを開始し、旋回前方コンベアは、製品の下側部分のクリアを開始する。
【0007】
なお更なる態様において、製品を荷降ろし/荷広げするためのロボットトラックアンローダは、駆動サブアセンブリ及び搬送サブアセンブリが固定された移動ベース構造を含む。産業用ロボット及び旋回前方コンベアは移動ベース上に配設されている。前の説明と同様に、制御サブアセンブリは、産業用ロボット及び旋回前方コンベアの各々の選択的な関節動作による移動を協調させるために、産業用ロボット、旋回前方コンベア及び認識サブシステムと通信するように配置され得る。プロセッサからアクセス可能なプロセッサ実行可能命令を有するメモリを含む制御サブアセンブリは、ロボットトラックアンローダが、カメラによって収集されたデータ画像から探索可能空間を構築することを可能にする。探索可能空間は前景壁を含む。探索可能空間は、前景壁に関して特定の関係を有する候補製品接触面を決定するために探索される。ロボットトラックアンローダは次に、産業用ロボット及び旋回前方コンベアを使用する選び取り及びすくい上げ動作により製品を荷降ろしするために撤去動作を指定する。
【0008】
したがって、本ロボットトラックアンローダを利用する、これらのシステム及び方法は、荷降ろしされる製品及び積荷の量を最大化する一方で、従業員の寿命を保護すること及びそれを延長することの両方のために人間の労働力の使用を最小化する。発明のこれら及び他の態様は、以降に記載される実施形態を参照して、明らかとなり、明瞭にされる。
【図面の簡単な説明】
【0009】
本発明の特徴及び利点のより完全な理解のために、ここでは、異なる図における対応する番号が対応する部分を参照する添付の図と併せて発明の詳細な説明を参照する。
【0010】
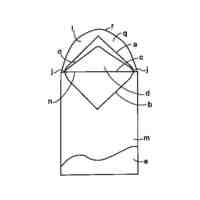
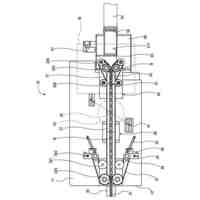
本明細書において提示される教示による、トラックのトレーラ内の製品を荷降ろしするために認識ベースロボット操作システムを利用する、第1動作構成における自動トラックアンローダの一実施形態の部分断面を有する側面図である。
第2動作構成における、図1Aに図示される自動トラックアンローダの一実施形態の部分断面を有する側面図である。
第3動作構成における、図1A及び図1Bに図示される自動トラックアンローダの一実施形態の部分断面を有する側面図である。
第4動作構成における、図1A、図1B及び図1Cに図示される自動トラックアンローダの一実施形態の部分断面を有する側面図である。
図1A~図1Dにおいて示される自動トラックアンローダの右側面図である。
図1A~図1Dにおいて示される自動トラックアンローダの左側面図である。
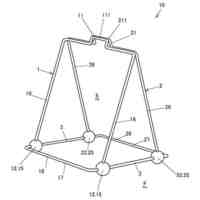
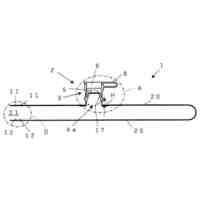
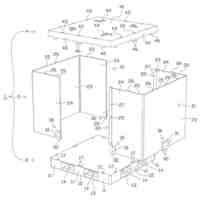
図1A~図1Dにおいて示される自動トラックアンローダの前方斜視図であり、旋回前方コンベアは、例えば低位置又は最低位置であり得る第1位置において関節動作する。
図1A~図1Dに示される自動トラックアンローダの前方斜視図であり、旋回前方コンベアは第2位置において関節動作する。
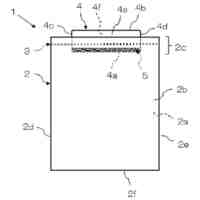
図1A~図1Dに示される自動トラックアンローダの上面図である。
図1A~図1Dに示される自動トラックアンローダの下面図である。
図1A~図1Dに示される自動トラックアンローダの後方斜視図であり、旋回前方コンベアは、例として低位置において関節動作する。
図1A~図1Dに示される自動トラックアンローダの後方斜視図であり、旋回前方コンベアは、例として高位置において関節動作する。
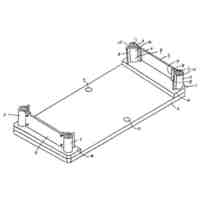
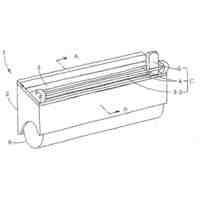
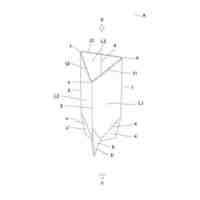
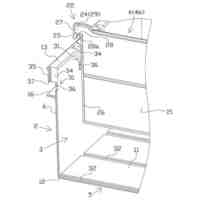
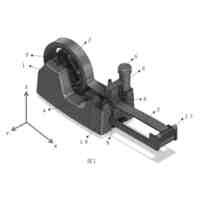
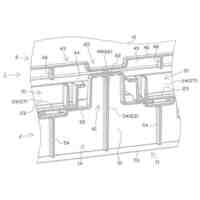
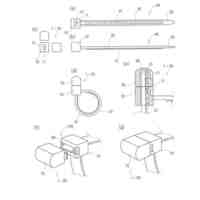
自動トラックアンローダの部分を形成する旋回前方コンベアの一実施形態の前方上斜視図である。
図3Aにおける旋回前方コンベアの下斜視図である。
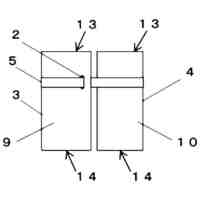
第1動作実施形態における図3A及び図3Bに図示される旋回前方コンベアの部分の側面図である。
第2動作実施形態における図3A及び図3Bに図示される旋回前方コンベアの前方斜視図である。
代替的動作実施形態における図3A及び図3Bに図示される旋回前方コンベアの前方斜視図である。
更なる代替的動作実施形態における図3A及び図3Bに図示される旋回前方コンベアの前方斜視図である。
ロボットトラックアンローダの一実施形態の機能ブロック図である。
追加の詳細におけるロボットトラックアンローダの一実施形態の機能ブロック図である。
ロボットトラックアンローダの部分を形成するロボットコントローラの一実施形態の機能ブロック図である。
第1動作実施形態における認識ベースロボット操作システムの一実施形態の概略図である。
第2動作実施形態における認識ベースロボット操作システムの一実施形態の概略図である。
第3動作実施形態における認識ベースロボット操作システムの一実施形態の概略図である。
第4動作実施形態における認識ベースロボット操作システムの一実施形態の概略図である。
認識ベースロボット操作についての方法の一実施形態を図示するフローチャートである。
製品の認識ベースロボット操作についての方法の一実施形態を図示するフローチャートである。
製品を荷降ろしするロボットトラックアンローダの一動作実装を図示するフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
箱
21日前
個人
ゴミ箱
14日前
個人
包装体
1か月前
個人
構造体
8か月前
個人
収納用具
4か月前
個人
物品収納具
4か月前
個人
折り畳み水槽
1か月前
個人
パウチ補助具
9日前
個人
掃除楽々ゴミ箱
5か月前
個人
ダンボール宝箱
1か月前
個人
開封用カッター
6か月前
個人
チャック付き袋体
7か月前
個人
パウチ容器
7か月前
個人
圧縮収納袋
1か月前
個人
折りたたみコップ
7か月前
三甲株式会社
容器
3か月前
株式会社イシダ
箱詰装置
3か月前
積水樹脂株式会社
接着剤
5か月前
積水樹脂株式会社
接着剤
7日前
個人
粘着テープ剥がし具
2か月前
個人
粘着テープ剥がし具
5か月前
個人
粘着テープ切断装置
3か月前
個人
チャック付き保存袋
6か月前
株式会社新弘
容器
16日前
三甲株式会社
容器
3か月前
個人
伸縮するゴミ収納器
7か月前
個人
塗料容器用蓋
29日前
株式会社イシダ
包装装置
21日前
株式会社新弘
容器
16日前
個人
ゴミ箱用ゴミ袋保持具
14日前
三菱製紙株式会社
包装用紙
2か月前
個人
蓋付結束バンド
2か月前
株式会社joze
攪拌容器
4か月前
三甲株式会社
トレー
5か月前
個人
装飾品展示台兼梱包箱
6か月前
日東精工株式会社
検査装置
4か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ