TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024113291
公報種別
公開特許公報(A)
公開日
2024-08-22
出願番号
2023018172
出願日
2023-02-09
発明の名称
把持装置及びその制御方法
出願人
国立大学法人徳島大学
,
三菱電線工業株式会社
代理人
弁理士法人前田特許事務所
主分類
B25J
15/08 20060101AFI20240815BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】柔らかくて強く掴むことができない被把持物であっても移動時に滑ることなく搬送できるようにする。
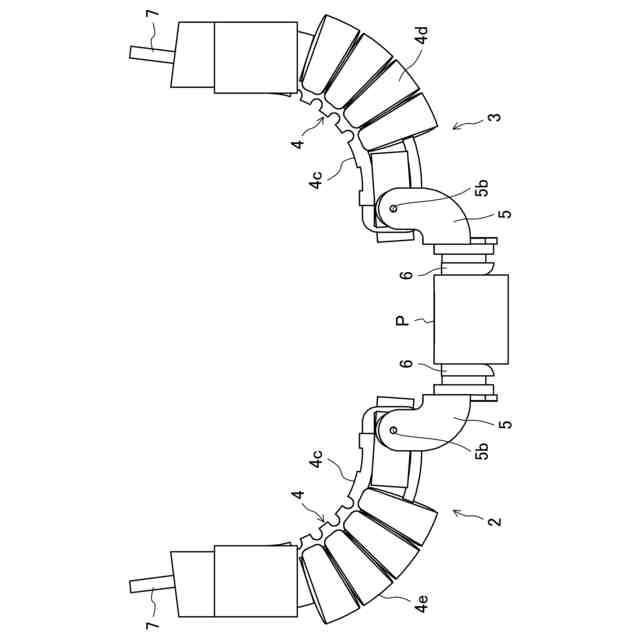
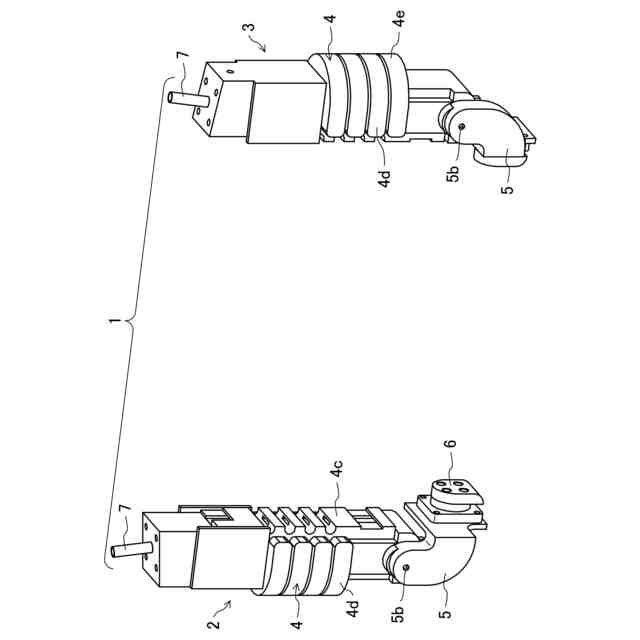
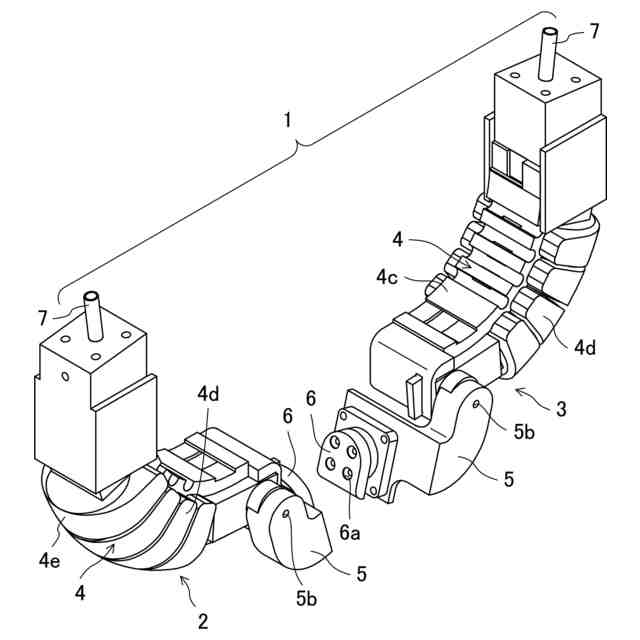
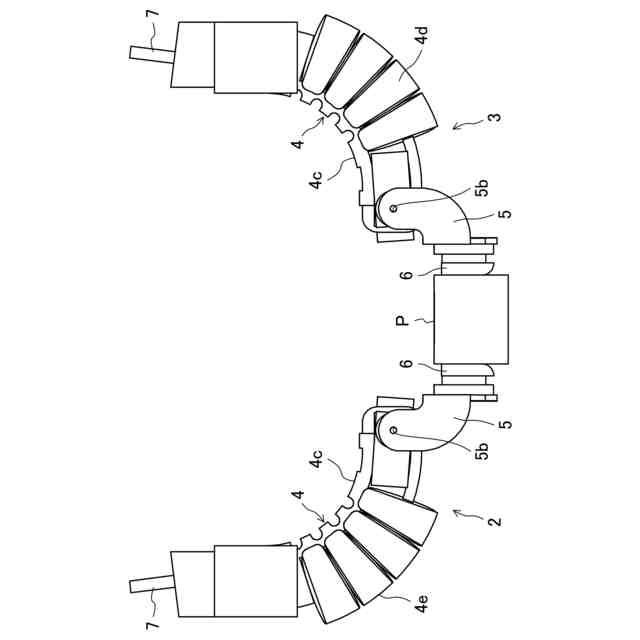
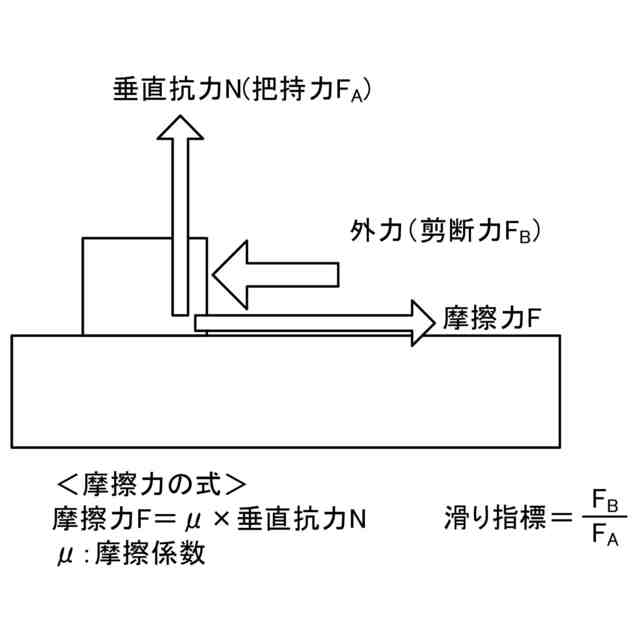
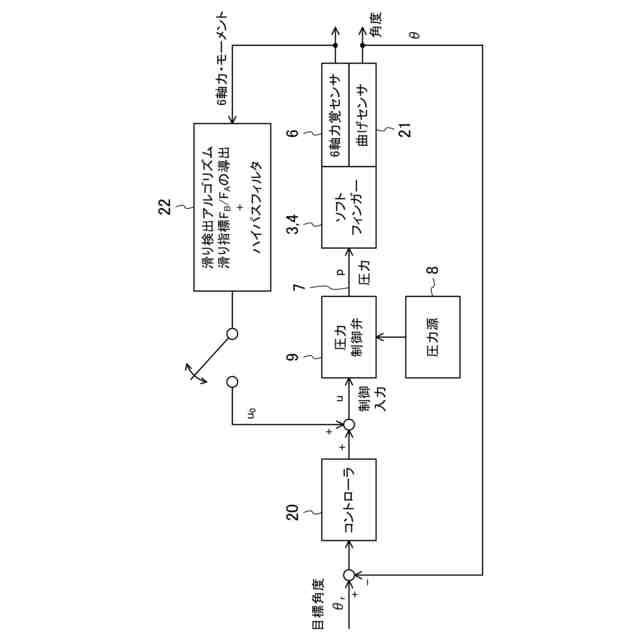
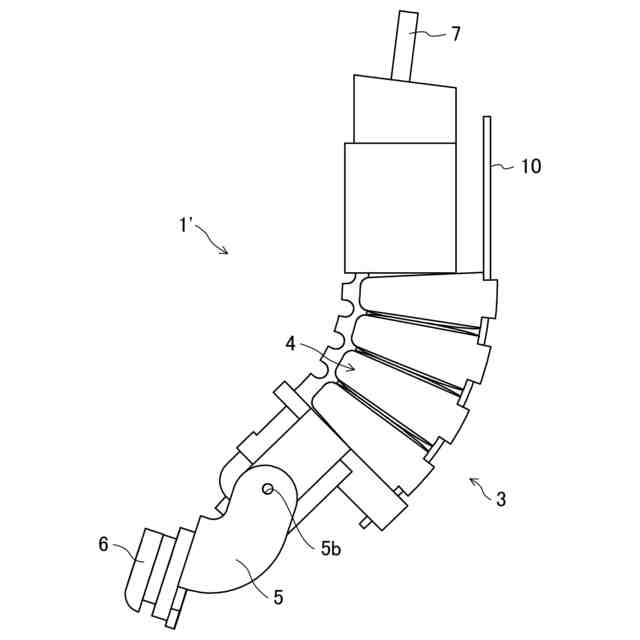
【解決手段】駆動流体圧によって内部を加圧状態とすることにより伸長部位と非伸長部位とでひずみを発生させ、屈曲運動をすることにより、互いに協働して被把持物Pを掴む複数のソフトフィンガー4と、複数のソフトフィンガー4の少なくとも1つの先端に設けた6軸力覚センサ6と、6軸力覚センサ6の値から、被把持物Pの滑り動作の方向と同じ接線方向の力である剪断力F
B
と、被把持物Pの表面に直交する方向の力である把持力F
A
との比よりなる滑り指標F
B
/F
A
が所定閾値以上となったとき、滑りが発生したと判断して複数のソフトフィンガー4による把持力F
A
を高くするように駆動流体圧を高めるコントローラ20とを備える。
【選択図】図1C
特許請求の範囲
【請求項1】
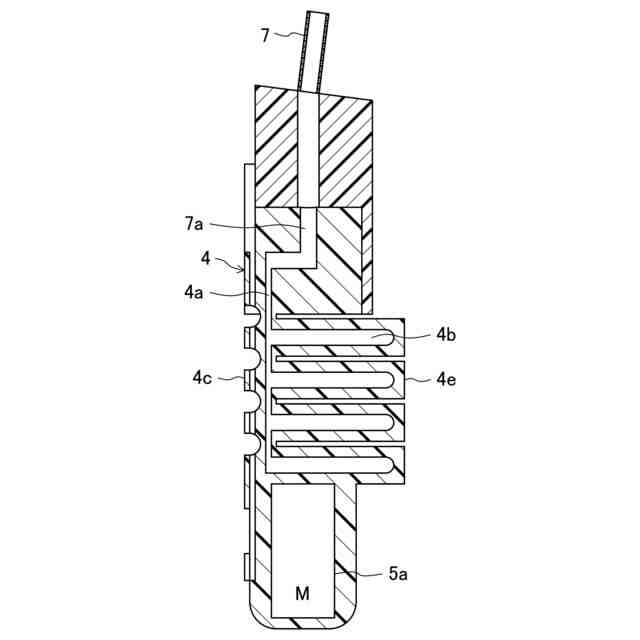
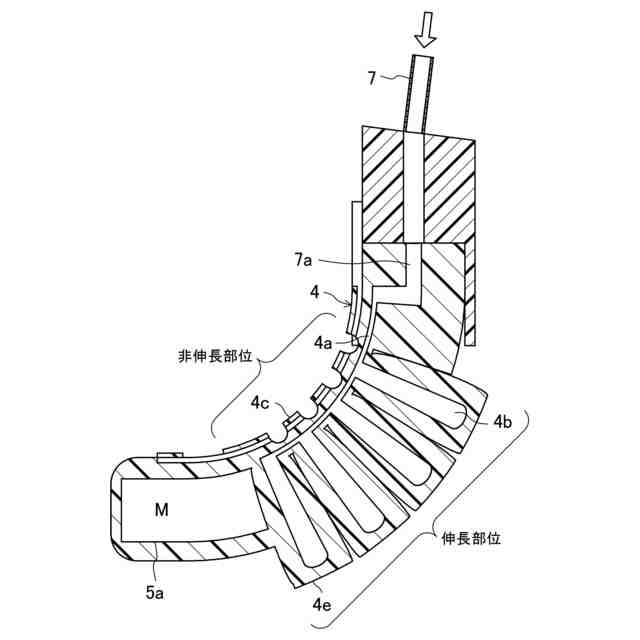
駆動流体圧によって内部を加圧状態とすることにより伸長部位と非伸長部位とでひずみを発生させ、屈曲運動をすることにより、互いに協働して被把持物を掴む複数のソフトフィンガーと、
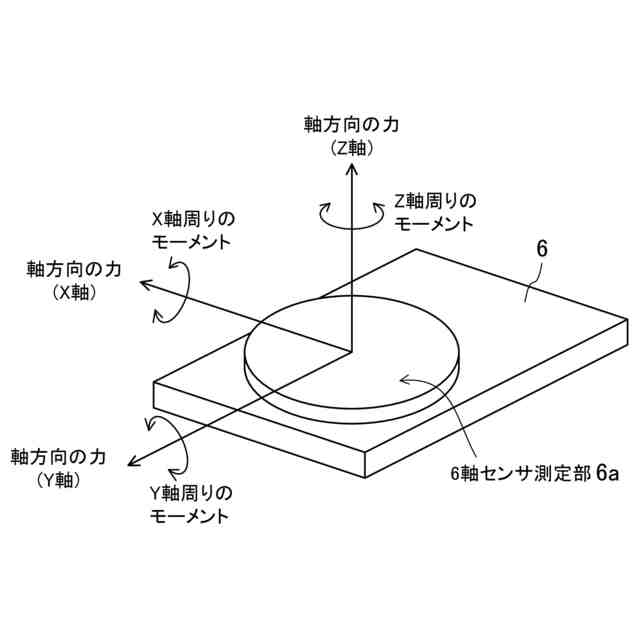
前記複数のソフトフィンガーの少なくとも1つの先端に設けた力覚センサと、
前記力覚センサの値から、前記被把持物の滑り動作の方向と同じ接線方向の力である剪断力と、前記被把持物の表面に直交する方向の力である把持力との比よりなる滑り指標が所定閾値以上となったとき、滑りが発生したと判断して前記複数のソフトフィンガーによる把持力を高くする制御部とを備えている
ことを特徴とする把持装置。
続きを表示(約 1,300 文字)
【請求項2】
駆動流体圧によって内部を加圧状態とすることにより伸長部位と非伸長部位とでひずみを発生させ、屈曲運動をすることにより、互いに協働して被把持物を掴む複数のソフトフィンガーと、
前記複数のソフトフィンガーの少なくとも1つの先端に設けた力覚センサと、
前記ソフトフィンガーの伸長部位側に設けられ、伸長部位側にテンションを掛けることで、内部圧力増加による前記ソフトフィンガーの全体の剛性を向上させる弾性部材と、
前記力覚センサの値から、前記被把持物の表面に直交する方向の力である把持力を検出したとき、駆動流体圧を高めて内部圧力を増加させて前記複数のソフトフィンガーの剛性を高めるように前記駆動流体圧を高める制御部とを備えている
ことを特徴とする把持装置。
【請求項3】
前記ソフトフィンガーの先端に設けられ、被把持物への接触面積を変えることで前記被把持物を掴む把持角度変更機構をさらに有し、
前記力覚センサは、前記把持角度変更機構に設けられている
ことを特徴とする請求項1又は2に記載の把持装置。
【請求項4】
複数のソフトフィンガーと、前記複数のソフトフィンガーの少なくとも1つの先端に設けた力覚センサと、制御部とを備えた、把持装置の制御方法であって、
前記制御部により、駆動流体圧によって内部を加圧状態とすることにより伸長部位と非伸長部位とでひずみを発生させ、屈曲運動をすることにより、互いに協働して被把持物を掴み、
前記把持装置が接続された搬送手段により、前記被把持物を掴んだ状態で前記被把持物を搬送しながら前記制御部が、前記力覚センサの検出値から、前記被把持物の滑り動作の方向と同じ接線方向の力である剪断力と、前記被把持物の表面に直交する方向の力である把持力との比よりなる滑り指標を計算し、
前記制御部が、前記滑り指標が所定の閾値以上となったのを検出したときに、滑りが発生したと判定し、
前記制御部が、前記駆動流体圧を増加させ、前記被把持物が滑るのを防止する
ことを特徴とする把持装置の制御方法。
【請求項5】
複数のソフトフィンガーと、前記複数のソフトフィンガーの少なくとも1つの先端に設けた力覚センサと、前記ソフトフィンガーの伸長部位側に設けられ、伸長部位側にテンションを掛けることで、内部圧力増加による前記ソフトフィンガーの全体の剛性を向上させる弾性部材と、制御部とを備えた、把持装置の制御方法であって、
前記制御部により、駆動流体圧によって内部を加圧状態とすることにより伸長部位と非伸長部位とでひずみを発生させ、屈曲運動をすることにより、互いに協働して被把持物を掴み、
前記被把持物を掴んだ状態で、前記力覚センサの検出値から、前記被把持物の表面に直交する方向の力である把持力を検出し、
前記制御部が、前記把持力が0よりも大きくなったのを検出したときに、前記駆動流体圧を増加させて前記ソフトフィンガーの全体の剛性を向上させる前記把持装置が接続された搬送手段により前記被把持物を搬送する
ことを特徴とする把持装置の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、駆動流体圧によって屈曲運動をすることにより、互いに協働して被把持物を掴む複数のソフトフィンガーと、これら複数のソフトフィンガーの先端に設けた力覚センサとを有する把持装置及びその制御方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、例えば、特許文献1のように、ロボットの手首部とハンドとの間に6軸力覚センサを設け、この6軸力覚センサによって直交3軸に平行な力と各軸周りのモーメントとを検出し、力制御によって組付部品と被組付部品の相対的な並進位置ズレ及び角度ズレを能動的に修正する、多関節形のロボットが知られている。
【0003】
また、特許文献2のように、少なくとも一指の指先における正圧力と摩擦力を検出する手段を備え、対象物体を把持する前に検出手段に対応する指先を把持対象物体の表面で滑らせて、その際の摩擦力と正圧力から対象物体表面における摩擦係数を推定し、この推定摩擦係数を用いて物体の滑りを予想して把持力を適正に制御するロボットハンドの把持力制御方法が知られている。この正圧力と摩擦力を検出する手段は、指の根元に配置される6軸力センサと、この6軸力センサの出力、指先の位置、姿勢から正圧力及び摩擦力を求める変換手段とを備えている。
【先行技術文献】
【特許文献】
【0004】
実開平3-19683号公報
特開2005-144573号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1及び2に示されるような、電動モータや油圧アクチュエータにより駆動されるロボットハンドは、主として工場で用いられる高剛性且つ高把持力なロボットハンドであり、食品や小部品などの比較的小さな、定型でなくて壊れやすい軽量の被把持物のハンドリングには適していない。また、このようなロボットハンドは、重量のあるアームを高速で動かすため、その作業範囲内に作業者が入ると危険であり、協働ロボットとしての使用については制約を受ける。
【0006】
一方、流体を駆動源としてフィンガー部を屈曲させて被把持物を把持するソフトフィンガーを有するロボットハンドも知られている。このソフトフィンガーによれば、壊れやすい被把持物のハンドリングも可能であるが、電動モータや油圧アクチュエータによって駆動されるロボットハンドに比べて把持力が弱いため、把持中の搬送時に移動の加減速に対応できず、柔らかく掴んだ被把持物が意図せず滑って飛んでしまうという問題がある。
【0007】
本発明は、かかる点に鑑みてなされたものであり、その目的とするところは、柔らかくて強く掴むことができない被把持物であっても移動時に滑ることなく搬送できるようにすることにある。
【課題を解決するための手段】
【0008】
上記の目的を達成するために、第1の発明では、
駆動流体圧によって内部を加圧状態とすることにより伸長部位と非伸長部位とでひずみを発生させ、屈曲運動をすることにより、互いに協働して被把持物を掴む複数のソフトフィンガーと、
前記複数のソフトフィンガーの少なくとも1つの先端に設けた力覚センサと、
前記力覚センサの値から、前記被把持物の滑り動作の方向と同じ接線方向の力である剪断力と、前記被把持物の表面に直交する方向の力である把持力との比よりなる滑り指標が所定閾値以上となったとき、滑りが発生したと判断して前記複数のソフトフィンガーによる把持力を高くする制御部とを備えている。
【0009】
通常、摩擦係数は基本的に互いに接触している物体表面の特性で決まる値であることから、把持力の大きさに無関係である。このため、質量や圧壊度が異なる種々の被把持物を把持対象とした場合であっても、上記の構成のような滑り指標を設定して閾値を超えた場合に、把持力を大きくすることで、効果的に被把持物の滑りを防止できる。
【0010】
第2の発明では、駆動流体圧によって内部を加圧状態とすることにより伸長部位と非伸長部位とでひずみを発生させ、屈曲運動をすることにより、互いに協働して被把持物を掴む複数のソフトフィンガーと、
前記複数のソフトフィンガーの少なくとも1つの先端に設けた力覚センサと、
前記ソフトフィンガーの伸長部位側に設けられ、伸長部位側にテンションを掛けることで、内部圧力増加による前記ソフトフィンガーの全体の剛性を向上させる弾性部材と、
前記力覚センサの値から、前記被把持物の表面に直交する方向の力である把持力を検出したとき、駆動流体圧を高めて内部圧力を増加させて前記複数のソフトフィンガーの剛性を高めるように前記駆動流体圧を高める制御部とを備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
JFEスチール株式会社
リン化合物の製造方法
3日前
国立大学法人徳島大学
腐敗菌情報検索方法、システム及びデータ構造並びにそのデータ構造を用いる食品安全・衛生管理システム及び方法
1か月前
OMC株式会社
ロボット
9日前
川崎重工業株式会社
ハンド
1か月前
株式会社クレスコ
補助吸着具
2日前
株式会社不二越
ロボット
1か月前
個人
けがき用治具
1か月前
個人
深孔スリーブ駆動ロッド構造
22日前
株式会社エビス
腰ベルト用連結具
9日前
株式会社不二越
ロボット操作装置
29日前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
17日前
株式会社デンソー
操縦桿
1か月前
株式会社黒澤鉄工製作所
けがき用治具
1か月前
個人
バール
22日前
梅馨堂合同会社
人協働ロボットシステム
24日前
ARMA株式会社
UI付エンドエフェクタ
25日前
株式会社デンソーウェーブ
ロボット制御システム
15日前
学校法人法政大学
装着型アシスト装置
19日前
アピュアン株式会社
エアー式衝撃工具
12日前
若井ホールディングス株式会社
レンチ構造とその製造方法
1か月前
株式会社マキタ
作業機
29日前
三菱電機株式会社
トルク締め個所検出システム
22日前
株式会社マキタ
インパクト工具
10日前
株式会社マキタ
インパクト工具
10日前
高丸工業株式会社
ロボット操作システムの動作方法
22日前
シブヤパッケージングシステム株式会社
物品移載装置
1か月前
SB C&S株式会社
治具セット
9日前
株式会社不二越
ロボットの教示システム及び教示方法
16日前
中国電力株式会社
電動ドライバー
16日前
オムロン株式会社
モバイルロボット
16日前
JUKI株式会社
ハンドリング装置
24日前
オムロン株式会社
モバイルロボット
16日前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
12日前
株式会社デンソー
作業装置および作業プログラム
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ