TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024105000
公報種別
公開特許公報(A)
公開日
2024-08-06
出願番号
2023009488
出願日
2023-01-25
発明の名称
表示制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G08G
1/09 20060101AFI20240730BHJP(信号)
要約
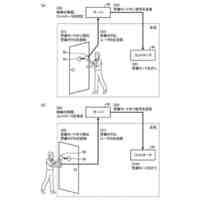
【課題】移動体が交差点を通過する際に、当該移動体の遠隔操作のための表示装置の画像表示についての遠隔オペレータの視認性を向上できるようにする。
【解決手段】表示制御装置は、遠隔オペレータによる移動体の遠隔操作のための表示装置の画像表示を制御するように構成されている。表示装置は、移動体が通過する交差点に設置され、且つ、交差点のエリアの交通状況を撮像するカメラの画像である交差点画像を表示する第1画面を含む。表示制御装置は、移動体の右左折に関する遠隔オペレータの意思情報を取得するセンサと、プロセッサと、を備える。プロセッサは、交差点画像内での移動体の進行方向と意思情報とに応じて移動体の予定進路を示す進路画像の形状を決定し、進路画像を交差点画像内の移動体と関連付けつつ交差点画像に重畳的に表示させる。
【選択図】図5
特許請求の範囲
【請求項1】
遠隔オペレータによる移動体の遠隔操作のための表示装置の画像表示を制御する表示制御装置であって、
前記表示装置は、前記移動体が通過する交差点に設置され且つ前記交差点のエリアの交通状況を撮像するカメラの画像である交差点画像を表示する第1画面を含み、
前記表示制御装置は、
前記移動体の右左折に関する前記遠隔オペレータの意思情報を取得するセンサと、
プロセッサと、
を備え、
前記プロセッサは、
前記交差点画像内での前記移動体の進行方向と、前記意思情報とに応じて、前記移動体の予定進路を示す進路画像の形状を決定し、
前記進路画像を、前記交差点画像内の前記移動体と関連付けつつ前記交差点画像に重畳的に表示させる
表示制御装置。
続きを表示(約 460 文字)
【請求項2】
前記意思情報は、前記遠隔オペレータによって操作されるウインカー操作器が中立位置、右折指示位置、又は左折指示位置であることを示す情報である
請求項1に記載の表示制御装置。
【請求項3】
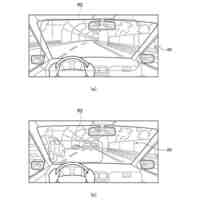
前記表示装置は、前記移動体の前方を撮像する移動体カメラの画像を表示する第2画面を含み、
前記意思情報は、前記第2画面を見る前記遠隔オペレータの視線の情報である
請求項1に記載の表示制御装置。
【請求項4】
前記意思情報は、前記遠隔オペレータによって操作されるステアリングホイールの操作量を示す情報である
請求項1に記載の表示制御装置。
【請求項5】
前記プロセッサは、前記移動体が第1方向から前記交差点に進入する場合に前記第1画面に表示される前記交差点画像に対して、前記第1方向と反対の第2方向から前記移動体が前記交差点に進入する場合に前記第1画面に表示される前記交差点画像を左右反転させる
請求項1に記載の表示制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体の遠隔操作のための表示制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1は、車両に搭載された情報表示装置を備える交通情報表示システムを開示している。この情報表示装置は、選択された地点の地図情報と受信したカメラパラメータとから、受信した撮像画像中における自車両の進路の方向を求め、撮像画像に進路の方向を示す情報を合成して画面に表示する。
【0003】
また、特許文献2は、自動運転車両に遠隔指示を行うシステムを開示している。このシステムは、自動運転車両の外部状況と進路とに基づいて、車両から遠隔コマンダに送信されるセンサ情報の範囲を限定情報範囲に設定する。
【先行技術文献】
【特許文献】
【0004】
特開2004-021514号公報
特開2021-043523号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
自動車等の移動体の遠隔操作(遠隔運転又は遠隔支援)の際の遠隔オペレータの安全確認のために、交差点に設置されたカメラの画像を遠隔オペレータ端末の表示装置の画面に表示することが考えられる。このような画像の表示には、表示装置に表示される画像を見た遠隔オペレータが画像内での移動体の進路を瞬時に把握しながら交通状況を容易に把握できることが求められる。
【0006】
しかしながら、特許文献1に記載の技術において撮像画像に合成される「進路の方向を示す情報」は、地図情報とカメラパラメータとに基づいて決定されるものであり、自車両の運転者が現在考えている移動体の進路(すなわち、移動体の進路に関する運転者の意思)を速やかに反映して決定されるものではない。
【0007】
したがって、仮に「移動体の遠隔操作」に対して特許文献1の技術を適用することができたとしても、「進路の方向を示す情報」は、移動体が交差点を通過する際の遠隔オペレータの意思に応じた移動体の進路を適切に表示することはできない。このため、特許文献1に記載の技術は、「移動体の遠隔操作」を行う遠隔オペレータが画像内での移動体の進路を瞬時に把握しながら交通状況を容易に把握できるようにするうえで改善の余地を残している。このことは、特許文献2に記載の技術についても同様である。
【0008】
本開示は、上述のような課題に鑑みてなされたものであり、移動体が交差点を通過する際に、当該移動体の遠隔操作のための表示装置の画像表示についての遠隔オペレータの視認性を向上できる表示制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
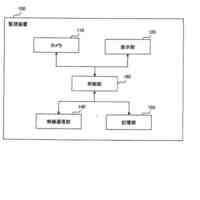
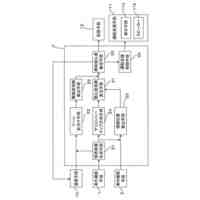
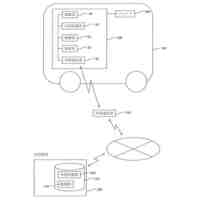
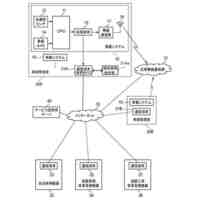
本開示に係る表示制御装置は、遠隔オペレータによる移動体の遠隔操作のための表示装置の画像表示を制御するように構成されている。表示装置は、移動体が通過する交差点に設置され且つ交差点のエリアの交通状況を撮像するカメラの画像である交差点画像を表示する第1画面を含む。表示制御装置は、移動体の右左折に関する遠隔オペレータの意思情報を取得するセンサと、プロセッサと、を備える。プロセッサは、交差点画像内での移動体の進行方向と意思情報とに応じて移動体の予定進路を示す進路画像の形状を決定し、進路画像を交差点画像内の移動体と関連付けつつ交差点画像に重畳的に表示させる。
【発明の効果】
【0010】
本開示によれば、移動体が交差点を通過する際に、当該移動体の遠隔操作のための表示装置の画像表示についての遠隔オペレータの視認性を向上させることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
大阪瓦斯株式会社
警報装置
14日前
株式会社SUBARU
車載装置
14日前
株式会社大林組
誘導装置
13日前
株式会社小糸製作所
転倒検知装置
20日前
ニッタン株式会社
煙感知器
14日前
大阪瓦斯株式会社
音声出力システム
14日前
大阪瓦斯株式会社
音声出力システム
14日前
綜合警備保障株式会社
警備システム
13日前
株式会社ブリッツ
車両情報処理装置
16日前
大阪瓦斯株式会社
音声出力システム
14日前
大阪瓦斯株式会社
音声出力システム
14日前
株式会社SUBARU
運転支援装置
13日前
大阪瓦斯株式会社
音声出力システム
14日前
株式会社CCT
監視装置及び監視方法
9日前
ニッタン株式会社
火災感知端末
15日前
ニッタン株式会社
火災感知端末
13日前
株式会社ユピテル
システムおよびプログラム等
13日前
トヨタ車体株式会社
運転支援装置
14日前
マツダ株式会社
興味関心度推定装置
14日前
マツダ株式会社
興味関心度推定装置
14日前
日本信号株式会社
遠隔監視システム
今日
本田技研工業株式会社
データ通信装置
13日前
株式会社デンソー
運転支援装置
6日前
能美防災株式会社
加煙試験器
1日前
能美防災株式会社
火災感知器
15日前
能美防災株式会社
火災感知器
15日前
綜合警備保障株式会社
警備システム及び警備方法
13日前
トヨタ自動車株式会社
脇見判定方法
17日前
株式会社SUBARU
車両のすれ違い調停システム
14日前
大作商事株式会社
測定装置及び測定システム
13日前
矢崎総業株式会社
データ処理装置
8日前
日置電機株式会社
試験システム
今日
能美防災株式会社
火災検出装置
13日前
三菱電機モビリティ株式会社
運転支援装置及び運転支援方法
今日
株式会社IHI
安全支援システム
13日前
セコム株式会社
監視システム
9日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ