TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024094319
公報種別
公開特許公報(A)
公開日
2024-07-09
出願番号
2024044539,2022209907
出願日
2024-03-21,2022-12-27
発明の名称
ロボット制御装置、制御方法、プログラム、ロボット及びロボットシステム
出願人
京セラ株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20240702BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
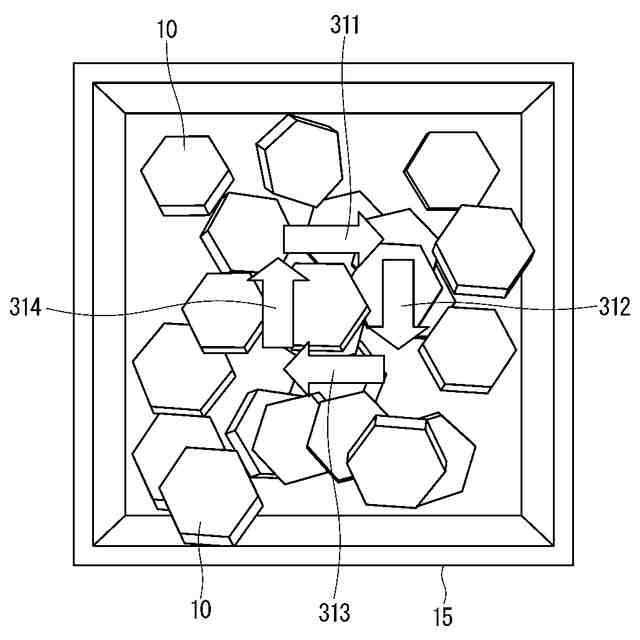
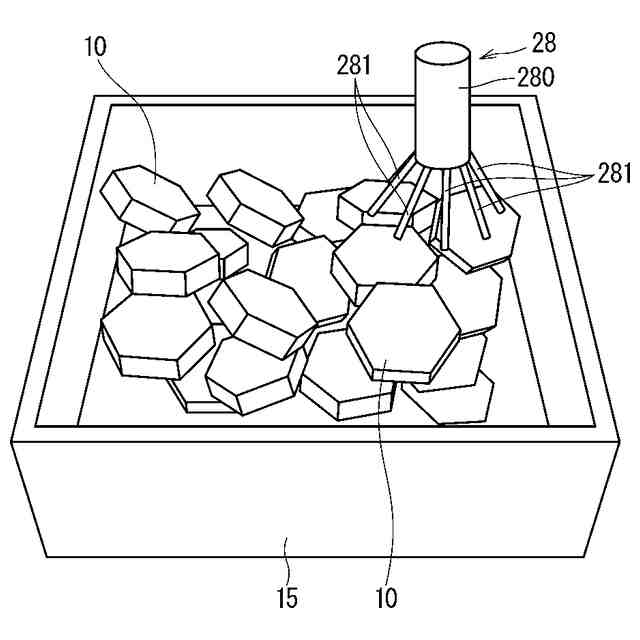
【課題】ロボットを利用して、他よりも積み上がった複数の対象物を崩すことを可能にする技術を提供する。
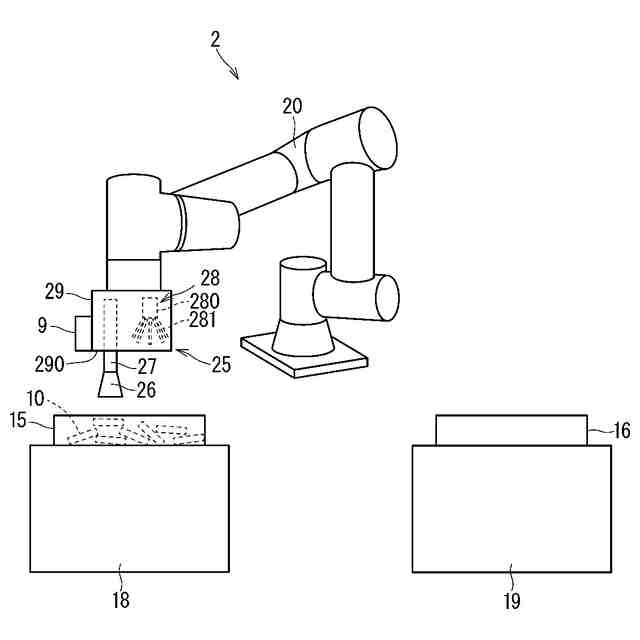
【解決手段】ロボット制御装置は、複数の対象物に対する作業を実行するロボットを制御する制御部を備える。制御部は、他よりも積み上がった複数の対象物に対して、複数の対象物を崩すようにロボットを動作させる。
【選択図】図9
特許請求の範囲
【請求項1】
複数の対象物に対する作業を実行するロボットを制御する制御部を備え、
前記制御部は、他よりも積み上がった複数の対象物に対して、前記複数の対象物を崩すように前記ロボットを動作させる、
ロボット制御装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載のロボット制御装置であって、
前記制御部は、他よりも積み上がった複数の対象物に対して、前記ロボットに周回動作を実行させて前記複数の対象物を崩す、
ロボット制御装置。
【請求項3】
請求項1に記載のロボット制御装置であって、
前記制御部は、複数の対象物が互いに積み重なるよう、前記ロボットに前記複数の対象物を移動させる第1動作を実行させて、他よりも積みあがった前記複数の対象物を崩す第2動作を前記ロボットに実行させる、
ロボット制御装置。
【請求項4】
請求項3に記載のロボット制御装置であって、
前記制御部は、複数の前記第1動作を行った後に、前記第2動作を実行させる、ロボット制御装置。
【請求項5】
請求項3に記載のロボット制御装置であって、
前記制御部は、前記ロボットに前記複数の対象物の保持作業を実行させ、前記ロボットが前記複数の対象物の保持に成功した回数に応じて、前記第1動作を前記ロボットに実行させる、ロボット制御装置。
【請求項6】
請求項3に記載のロボット制御装置であって、
前記制御部は、前記ロボットに前記複数の対象物の保持作業を実行させ、前記ロボットが前記複数の対象物の保持に失敗した回数に応じて、前記第1動作を前記ロボットに実行させる、ロボット制御装置。
【請求項7】
請求項3に記載のロボット制御装置であって、
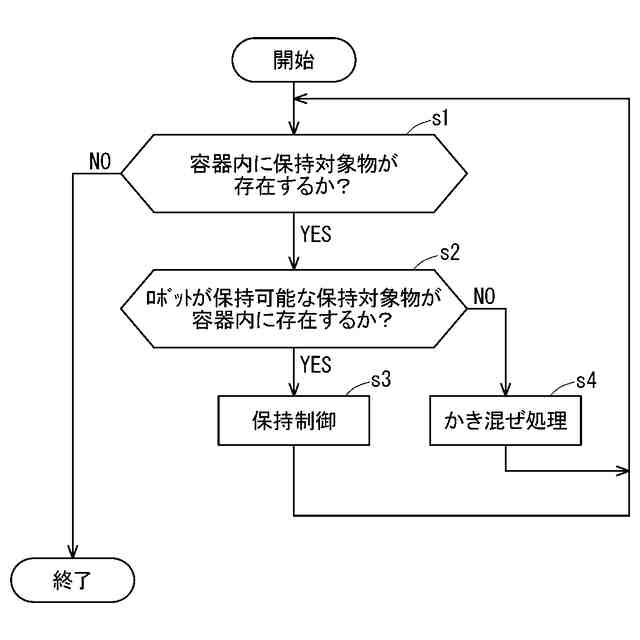
前記制御部は、前記ロボットに前記複数の対象物の保持作業を実行させ、前記ロボットが保持可能な対象物が存在しない場合、前記第1動作を前記ロボットに実行させる、ロボット制御装置。
【請求項8】
複数の対象物に対する作業を行うロボットの制御方法であって、
他よりも積み上がった複数の対象物に対して、前記複数の対象物を崩すようにロボットを制御する、制御方法。
【請求項9】
コンピュータ装置を、
請求項1から請求項7のいずれか一つに記載のロボット制御装置が備える前記制御部と
して機能させるためのプログラム。
【請求項10】
請求項1から請求項7のいずれか一つに記載のロボット制御装置によって制御されるロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットに関する。
続きを表示(約 800 文字)
【背景技術】
【0002】
特許文献1には、バラ積みされた複数のワークをロボットがかき混ぜる技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2011-115930号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ロボットに関する技術については改善の余地がある。
【課題を解決するための手段】
【0005】
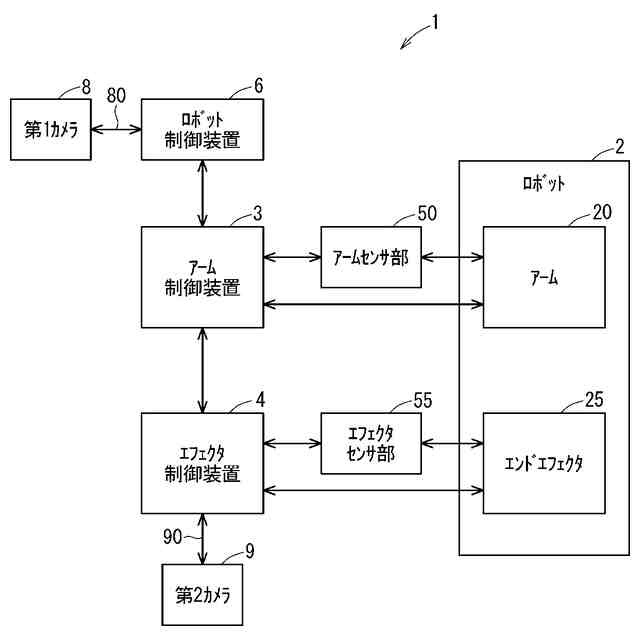
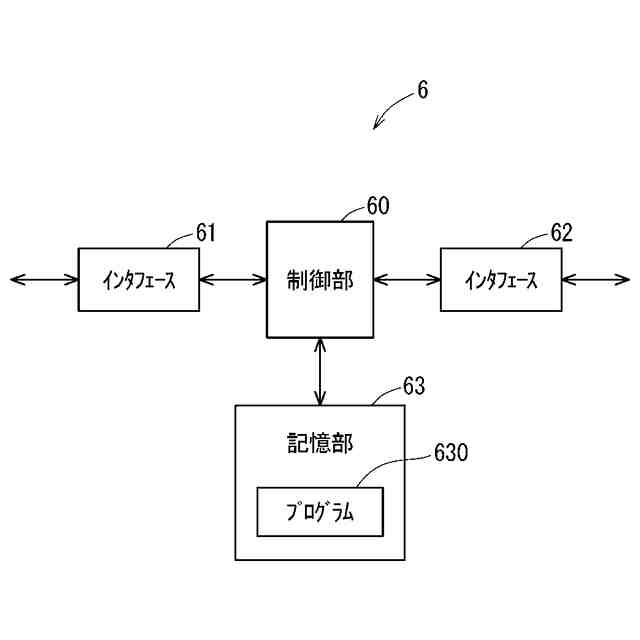
ロボット制御装置、制御方法、プログラム、ロボット及びロボットシステムが開示される。一の実施の形態では、ロボット制御装置は、複数の対象物に対する作業を実行するロボットを制御する制御部を備える。制御部は、他よりも積み上がった複数の対象物に対して、前記複数の対象物を崩すように前記ロボットを動作させる。
【0006】
また、一の実施の形態では、制御方法は、複数の対象物に対する作業を行うロボットの制御方法であって、他よりも積み上がった複数の対象物に対して、複数の対象物を崩すようにロボットを制御する。
【0007】
また、一の実施の形態では、プログラムは、コンピュータ装置を、上記のロボット制御装置が備える制御部として機能させるためのプログラムである。
【0008】
また、一の実施の形態では、ロボットは、上記のロボット制御装置によって制御されるロボットである。
【0009】
また、一の実施の形態では、ロボットシステムは、上記のロボット制御装置と、ロボット制御装置に制御されるロボットとを備える。
【発明の効果】
【0010】
ロボットを利用して、他よりも積み上がった複数の対象物を崩すことができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
搬送装置
3か月前
中国電力株式会社
腰袋
2か月前
株式会社ツノダ
挟持工具
4か月前
株式会社右川ゴム製造所
把持装置
4か月前
日東工器株式会社
衝撃工具
1か月前
個人
メンテナンス用スタンド
15日前
学校法人立命館
グリッパ
4か月前
学校法人立命館
ロボットハンド
5か月前
川崎重工業株式会社
罫書用治具
1か月前
株式会社マキタ
動力工具
2か月前
個人
容器引っ掛け棒およびその使用方法
16日前
個人
プーリーキー抜き治具
4か月前
株式会社ハーモ
開閉チャック装置
9日前
トヨタ自動車株式会社
ハンド構造
1か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社日本キャリア工業
ロボットハンド
15日前
国立大学法人山形大学
二重関節機構
2か月前
宮川工機株式会社
板状部品移動装置
2か月前
東京都公立大学法人
ロボットハンド
2か月前
CKD株式会社
電動把持装置
3か月前
工機ホールディングス株式会社
作業機
2か月前
マックス株式会社
打ち込み工具
1か月前
工機ホールディングス株式会社
作業機
5か月前
工機ホールディングス株式会社
作業機
5か月前
株式会社中村製作所
トルクドライバー
4か月前
工機ホールディングス株式会社
作業機
24日前
工機ホールディングス株式会社
作業機
24日前
マックス株式会社
打ち込み工具
1か月前
株式会社ダイヘン
情報処理装置
4か月前
株式会社ダイヘン
画像生成装置
4か月前
個人
スロープバリビス-ビス&-ドライバー
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社ダイヘン
画像生成装置
4か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ