TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024088228
公報種別
公開特許公報(A)
公開日
2024-07-02
出願番号
2022203292
出願日
2022-12-20
発明の名称
荷役用移動体
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
B62K
7/04 20060101AFI20240625BHJP(鉄道以外の路面車両)
要約
【課題】荷役用移動体を小型化できる荷役用移動体を提供すること。
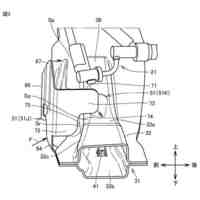
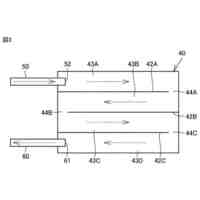
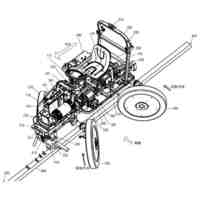
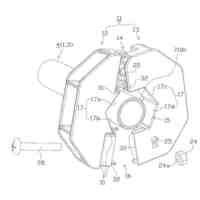
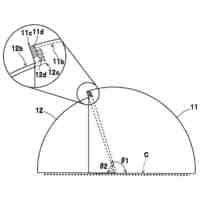
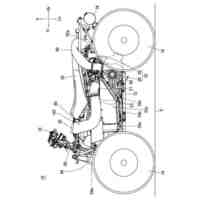
【解決手段】荷役用移動体10は、倒立車輪型である。荷役用移動体10は、右駆動輪31及び左駆動輪32と、軸線Lを揺動中心に揺動可能な車体11と、車体11に支持されるとともに、フォーク45を備える荷役装置40と、を備える。車体11は、右輪駆動部21及び左輪駆動部25と、制御装置50と、バッテリ33とを備える。制御装置50は、右輪駆動部21及び左輪駆動部25の駆動を制御して、軸線Lを揺動中心に車体11を揺動させることによって車体11の姿勢を制御する姿勢制御部を備える。姿勢制御部は、荷役用移動体10を倒立させるべく、車体11を揺動させて荷役用移動体10の重心を前後方向に移動させる。
【選択図】図2
特許請求の範囲
【請求項1】
倒立車輪型の荷役用移動体であって、
左右一対の駆動輪と、
前記左右一対の駆動輪の車軸と同軸の軸線を揺動中心に揺動可能な車体と、
前記車体に支持される荷役装置であって、荷を支持する支持部材を備える前記荷役装置と、を備え、
前記車体は、前記左右一対の駆動輪を駆動させる駆動部と、当該駆動部及び前記荷役装置の駆動を制御する制御装置と、前記駆動部及び前記荷役装置の電力源とを備え、
前記制御装置は、前記駆動部の駆動を制御して、前記軸線を揺動中心に前記車体を揺動させることによって前記車体の姿勢を制御する姿勢制御部を備え、
前記姿勢制御部は、前記荷役用移動体を倒立させるべく、前記駆動部によって前記車体を揺動させて前記荷役用移動体の重心を前後方向に移動させることを特徴とする荷役用移動体。
続きを表示(約 440 文字)
【請求項2】
前記荷役装置は、前記支持部材に連結されるアームを備え、前記アームは、先端部と、前記先端部とは反対側の基端部を備え、前記支持部材は、前記アームの先端部に揺動可能に連結されている請求項1に記載の荷役用移動体。
【請求項3】
前記アームは、複数のリンクと、前記リンク同士を連結する関節と、を備え、前記アームは、前記関節によって連結された前記リンク同士の相対角度を変更可能であるとともに、前記リンクとして、前記アームの先端部を形成するリンク、及び前記アームの基端部を形成するリンクを備え、前記支持部材は、前記アームの先端部を形成するリンクに揺動可能に連結されている請求項2に記載の荷役用移動体。
【請求項4】
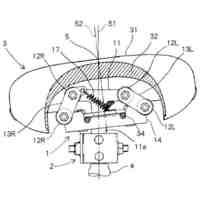
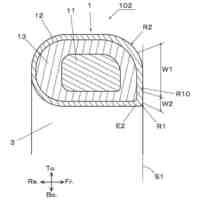
前記車体は、前記制御装置及び前記電力源を収容する筐体を備え、
前記アームの前記基端部は、前記筐体の重力方向上側の面よりも前記重力方向において前記車軸側に配置されている請求項2又は請求項3に記載の荷役用移動体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、荷役用移動体に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
例えば、特許文献1には、倒立車輪型の移動体の一例であるロボットが開示されている。ロボットは、ボディと、2つの脚と、関節式アームと、を備える。ボディは、倒立振子ボディと、カウンタバランスボディと、を備える。カウンタバランスボディと倒立振子ボディとは、後部関節によって回転可能に結合されている。また、倒立振子ボディには、関節式アームが連結されている。ロボットにおいて、カウンタバランスボディを倒立振子ボディに対して回転させることにより、ロボットの質量中心は、重力垂直軸に対して移動する。これにより、ロボットの姿勢が変わるとともに、バランスを取ることができる。
【0003】
2つの脚の各々は、上部と、下部とを備える。上部と下部は膝関節によって連結されている。脚の上部は、脚の第1端部から膝関節まで延在する。脚の下部は、膝関節から第2端部まで延在する。膝関節は、膝アクチュエータによって駆動する。
【0004】
脚の第1端部は、ボディの股関節に回転可能に結合されている。股関節は、脚アクチュエータによって駆動する。脚アクチュエータは、脚の上部をボディに対して回転させる。脚の第2端部は、駆動輪に結合されている。駆動輪は、駆動部としてのトルクアクチュエータによって駆動する。トルクアクチュエータの駆動により駆動輪が回転すると、ロボットを移動させることができる。
【先行技術文献】
【特許文献】
【0005】
特表2022-524973号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
倒立車輪型の移動体は、駆動部によって駆動輪を回転させることによって移動可能であるとともに、倒立可能とする。ところが、特許文献1のロボットにおいて、駆動部としてのトルクアクチュエータは、脚だけでなく、倒立振子ボディと、カウンタバランスボディとを動かすので、これらを動かす時に大きなトルクが加わるため、大きな出力を必要とする。その結果、トルクアクチュエータの規格が大きくなるため、ロボットが大型化してしまう。
【課題を解決するための手段】
【0007】
上記課題を解決するための荷役用移動体は、倒立車輪型の荷役用移動体であって、左右一対の駆動輪と、前記左右一対の駆動輪の車軸と同軸の軸線を揺動中心に揺動可能な車体と、前記車体に支持される荷役装置であって、荷を支持する支持部材を備える前記荷役装置と、を備え、前記車体は、前記左右一対の駆動輪を駆動させる駆動部と、当該駆動部及び前記荷役装置の駆動を制御する制御装置と、前記駆動部及び前記荷役装置の電力源とを備え、前記制御装置は、前記駆動部の駆動を制御して、前記軸線を揺動中心に前記車体を揺動させることによって前記車体の姿勢を制御する姿勢制御部を備え、前記姿勢制御部は、前記荷役用移動体を倒立させるべく、前記駆動部によって前記車体を揺動させて前記荷役用移動体の重心を前後方向に移動させることを要旨とする。
【0008】
これによれば、車体は、駆動部、制御装置、及び電力源を含む重量物である。そして、姿勢制御部は、駆動部によって重量物である車体を揺動させることで、荷役用移動体の重心を前後方向へ移動させて荷役用移動体を倒立させることができる。また、制御装置は、駆動部によって駆動輪を駆動することにより、荷役用移動体を移動させることができる。したがって、カウンタウエイトのような重量物を車体と別に必要としなくても、駆動部によって荷役用移動体の倒立及び移動を可能にする。その結果、カウンタウエイトを車体とは別に必要とする場合と比べると、車体を動かす時に駆動部に加わるトルクを小さくできるため、駆動部が必要とする出力を小さくできる。よって、カウンタウエイトを必要とせず、かつ駆動部を小型化できるため、荷役用移動体を小型化できる。
【0009】
荷役用移動体について、前記荷役装置は、前記支持部材に連結されるアームを備え、前記アームは、先端部と、前記先端部とは反対側の基端部を備え、前記支持部材は、前記アームの先端部に揺動可能に連結されていてもよい。
【0010】
これによれば、アームの基端部から先端部までの長さを利用して、支持部材を車体から離れた位置まで移動できる。そして、支持部材を揺動させることによって、支持部材によって荷を支持できる。よって、例えば、荷役装置を支持部材だけとする場合と比べると、アームを備えることにより、車体の周りにおいて支持部材で荷を支持できる範囲を広げることができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
車両
今日
株式会社豊田自動織機
車両用シート
今日
株式会社豊田自動織機
オイル流通構造
2日前
株式会社豊田自動織機
シートベルト装置
今日
株式会社豊田自動織機
織機の糸検出装置
1日前
株式会社豊田自動織機
移動体制御システム
今日
株式会社豊田自動織機
内燃機関の制御装置および内燃機関の制御方法
今日
個人
自転車の傘
9か月前
個人
重量物移動台車
6か月前
個人
サドル揺動装置
11か月前
個人
二輪バイク補助輪
11か月前
井関農機株式会社
作業機
9か月前
井関農機株式会社
作業機
7か月前
個人
自転車用荷台
2か月前
個人
車両用横転防止装置
7か月前
井関農機株式会社
作業車両
4か月前
個人
クリアレインシェード
6か月前
日本精機株式会社
表示装置
8か月前
三甲株式会社
保護具
7か月前
株式会社ホシプラ
台車
6か月前
個人
自転車の駐輪装置
12か月前
株式会社北誠商事
被覆構造体
8か月前
個人
ステアリングの操向部材
2か月前
個人
スライドレインプルーフ
5か月前
株式会社クラベ
面状ユニット
5か月前
帝人株式会社
車両構造体
4か月前
三甲株式会社
台車
1か月前
祖峰企画株式会社
平台車
3か月前
三甲株式会社
台車
9か月前
三甲株式会社
台車
7か月前
三甲株式会社
台車
1か月前
個人
足踏みペダル式自転車
5か月前
ヤマハ発動機株式会社
車両
7か月前
井関農機株式会社
作業車両
9か月前
豊田合成株式会社
ハンドル
9か月前
井関農機株式会社
走行車両
7か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ