TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024083061
公報種別
公開特許公報(A)
公開日
2024-06-20
出願番号
2022197362
出願日
2022-12-09
発明の名称
教示データ蓄積装置
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
B25J
9/22 20060101AFI20240613BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数の実ロボットを導入することなく、教示時間を短縮できるようにする。
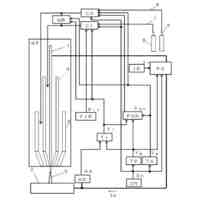
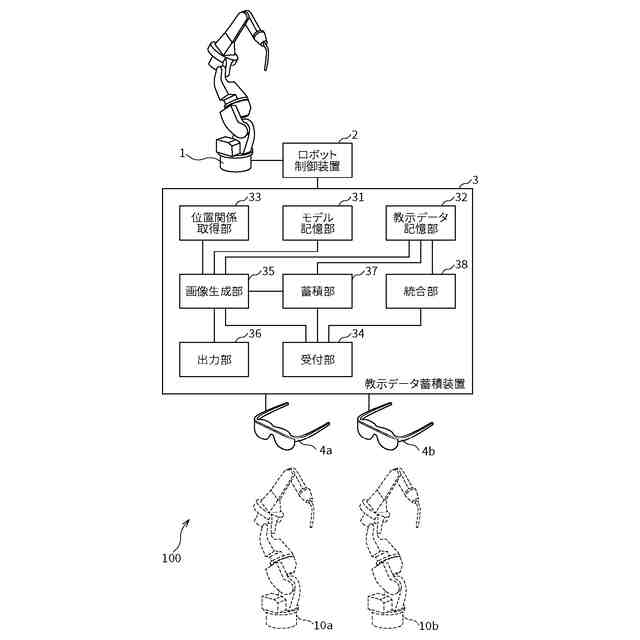
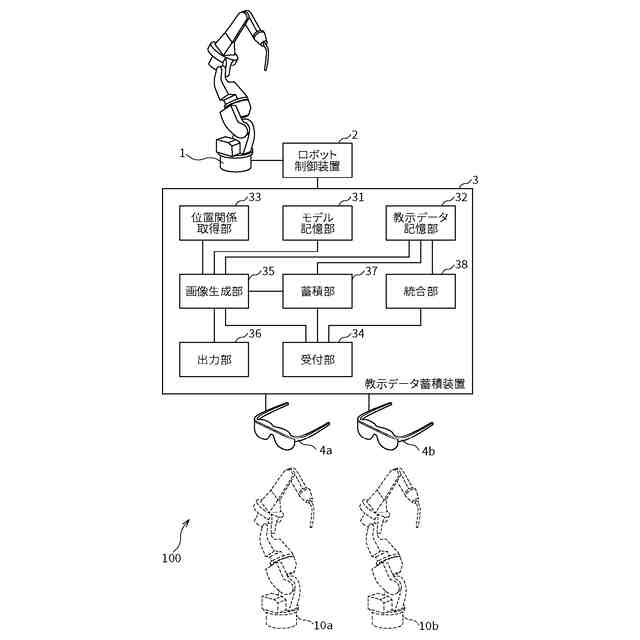
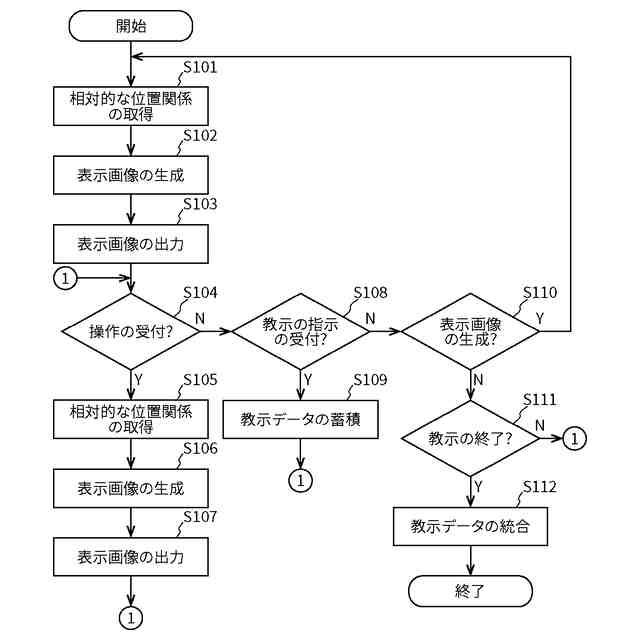
【解決手段】教示データ蓄積装置3は、実環境と表示装置4a,4bとの相対的な位置関係をそれぞれ取得する位置関係取得部33と、仮想ロボットの3次元モデル10a,10bへの操作及び教示の指示を受け付ける受付部34と、3次元モデル10a,10bと相対的な位置関係に基づいて、操作された3次元モデル10a,10bを表示するための表示装置4a,4b用の各表示画像を生成する画像生成部35と、各表示画像を表示装置4a,4bに出力する出力部36と、3次元モデル10a,10bに対する教示の指示が受け付けられた際に教示データを教示データ記憶部32に蓄積する蓄積部37とを備える。このようにして、複数の実ロボットを導入することなく、教示時間を短縮することができる。
【選択図】図1
特許請求の範囲
【請求項1】
実ロボットに対応する仮想ロボットの第1及び第2の3次元モデルが記憶されるモデル記憶部と、
前記実ロボットの教示データが記憶される教示データ記憶部と、
実環境と、画像を実環境の画像または実環境そのものに重ねて表示する第1及び第2の表示装置との相対的な位置関係である第1及び第2の相対的な位置関係をそれぞれ取得する位置関係取得部と、
前記仮想ロボットの第1及び第2の3次元モデルに対する操作及び教示の指示をそれぞれ受け付ける受付部と、
前記第1及び第2の3次元モデルと前記第1及び第2の相対的な位置関係とに基づいて、操作された第1及び第2の3次元モデルを実環境の所定の位置に表示するための前記第1及び第2の表示装置用の第1及び第2の表示画像をそれぞれ生成する画像生成部と、
前記第1及び第2の表示画像を前記第1及び第2の表示装置にそれぞれ出力する出力部と、
前記受付部によって前記仮想ロボットの第1の3次元モデルに対する教示の指示が受け付けられた際に、当該仮想ロボットの第1の3次元モデルに応じて第1の教示データを前記教示データ記憶部に蓄積し、前記受付部によって前記仮想ロボットの第2の3次元モデルに対する教示の指示が受け付けられた際に、当該仮想ロボットの第2の3次元モデルに応じて第2の教示データを前記教示データ記憶部に蓄積する蓄積部と、を備えた教示データ蓄積装置。
続きを表示(約 710 文字)
【請求項2】
前記教示データ記憶部で記憶されている第1及び第2の教示データを一つの教示データに統合する統合部をさらに備えた、請求項1記載の教示データ蓄積装置。
【請求項3】
前記第1及び第2の教示データは、教示対象の同じ領域における教示データを少なくとも一部に含んでおり、
前記統合部は、前記第1及び第2の教示データのうち、教示対象の同じ領域における第1及び第2の教示データについては、両者を平均することによって一つの教示データに統合する、請求項2記載の教示データ蓄積装置。
【請求項4】
前記画像生成部は、視覚的に区別可能に前記第1の教示データに応じた教示位置と前記第2の教示データに応じた教示位置との両方をも表示するための第1及び第2の表示画像を生成する、請求項1記載の教示データ蓄積装置。
【請求項5】
前記教示データ記憶部には、教示対象の領域を示す教示対象領域情報が記憶されており、
前記画像生成部は、前記教示対象領域情報で示される領域のうち、教示データが蓄積されていない領域をも表示するための第1及び第2の表示画像をそれぞれ生成する、請求項1記載の教示データ蓄積装置。
【請求項6】
前記教示データ記憶部には、教示対象の領域を示す教示対象領域情報が記憶されており、
前記画像生成部は、教示対象領域情報で示される領域のうち、前記第1の表示装置に近い領域をも示す第1の表示画像、及び教示対象領域情報で示される領域のうち、前記第2の表示装置に近い領域をも示す第2の表示画像をそれぞれ生成する、請求項1記載の教示データ蓄積装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、教示データを蓄積する教示データ蓄積装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
ティーチングプレイバック方式のロボットを制御する場合には、まず、ロボットを操作することによってティーチングを行って教示データを生成することが行われる。その教示データの生成を効率化するため、複数のロボットを複数人でそれぞれ操作して教示を行うことも行われている(例えば、特許文献1参照)。このようにすることで、教示にかかる時間を短縮することができる。
【先行技術文献】
【特許文献】
【0003】
特開2003-340756号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載された方法では、並行した教示のために複数の実ロボットを準備する必要があり、それに応じてコストがかかるという問題がある。また、複数の実ロボットを導入することができない場合には、教示のための時間を短縮することができないという問題もある。
【0005】
本発明は、上記課題を解決するためになされたものであり、複数の実ロボットを導入することなく、教示のための時間を短縮することができる装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の一態様による教示データ蓄積装置は、実ロボットに対応する仮想ロボットの第1及び第2の3次元モデルが記憶されるモデル記憶部と、実ロボットの教示データが記憶される教示データ記憶部と、実環境と、画像を実環境の画像または実環境そのものに重ねて表示する第1及び第2の表示装置との相対的な位置関係である第1及び第2の相対的な位置関係をそれぞれ取得する位置関係取得部と、仮想ロボットの第1及び第2の3次元モデルに対する操作及び教示の指示をそれぞれ受け付ける受付部と、第1及び第2の3次元モデルと第1及び第2の相対的な位置関係とに基づいて、操作された第1及び第2の3次元モデルを実環境の所定の位置に表示するための第1及び第2の表示装置用の第1及び第2の表示画像をそれぞれ生成する画像生成部と、第1及び第2の表示画像を第1及び第2の表示装置にそれぞれ出力する出力部と、受付部によって仮想ロボットの第1の3次元モデルに対する教示の指示が受け付けられた際に、仮想ロボットの第1の3次元モデルに応じて第1の教示データを教示データ記憶部に蓄積し、受付部によって仮想ロボットの第2の3次元モデルに対する教示の指示が受け付けられた際に、仮想ロボットの第2の3次元モデルに応じて第2の教示データを教示データ記憶部に蓄積する蓄積部と、を備えたものである。
【発明の効果】
【0007】
本発明の一態様による教示データ蓄積装置によれば、仮想ロボットの2個の3次元モデルを用いて教示を行うことによって、教示のための時間を短縮することができる。また、仮想ロボットを用いて教示を行うため、複数の実ロボットを導入しなくても教示を行うことができる。
【図面の簡単な説明】
【0008】
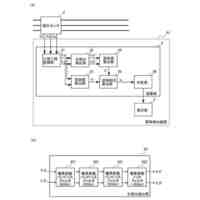
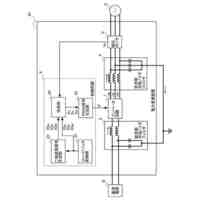
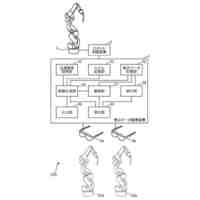
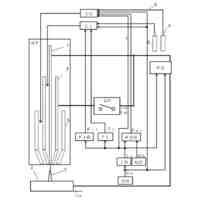
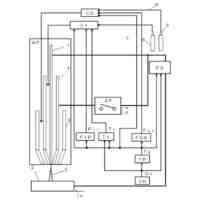
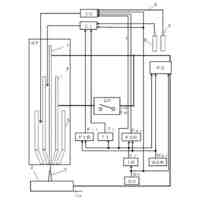
本発明の実施の形態による教示データ蓄積装置の構成を示すブロック図
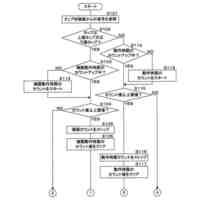
同実施の形態による教示データ蓄積装置の動作を示すフローチャート
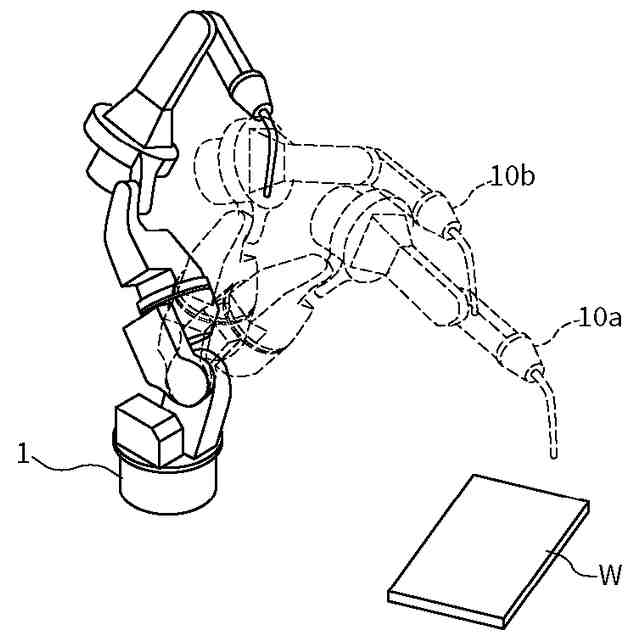
同実施の形態における仮想ロボットの3次元モデルの表示の一例を示す図
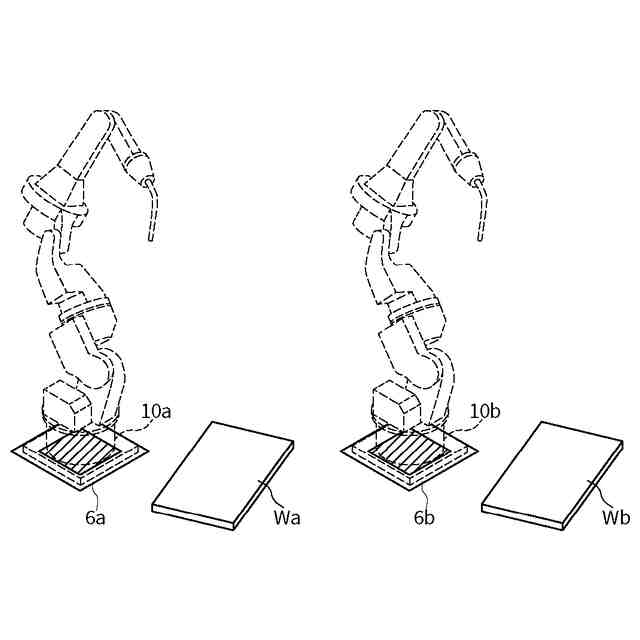
同実施の形態における仮想ロボットの3次元モデルの表示の一例を示す図
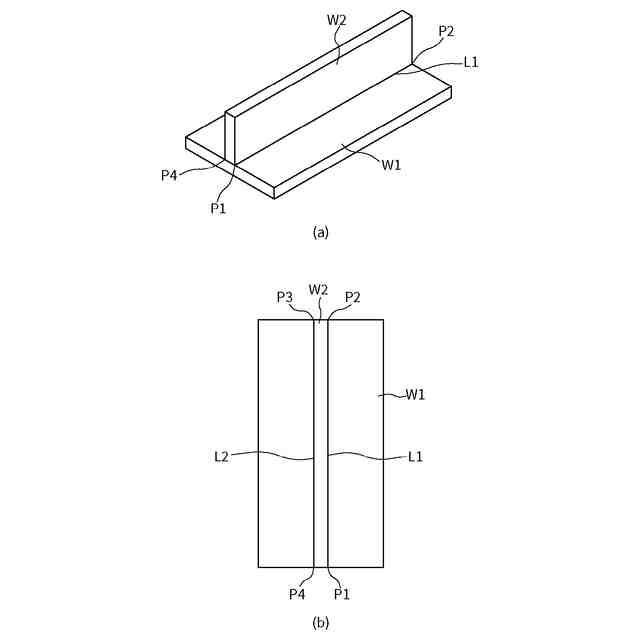
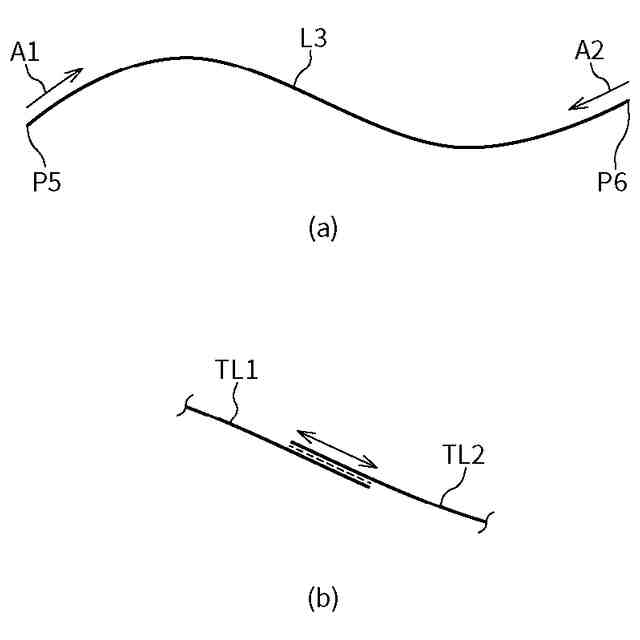
同実施の形態におけるワーク及び溶接線の一例を示す斜視図(図5(a))及び平面図(図5(b))
同実施の形態における溶接線(図6(a))、及び教示データ(図6(b))の一例を示す図
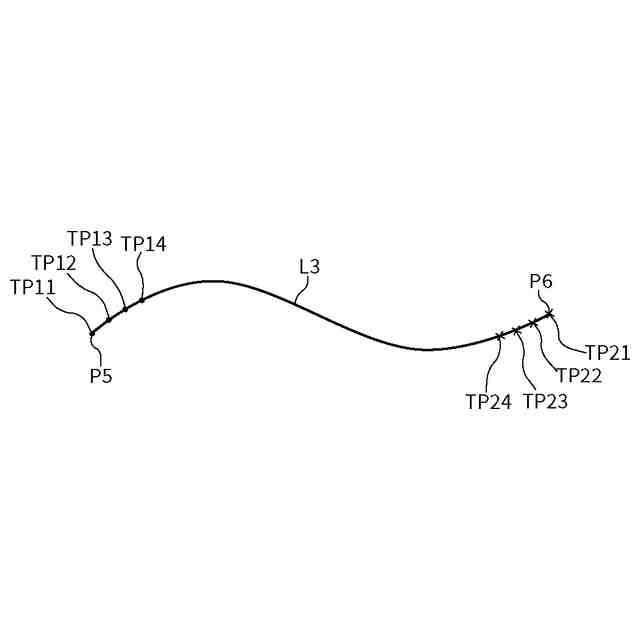
同実施の形態における教示データの一例を示す図
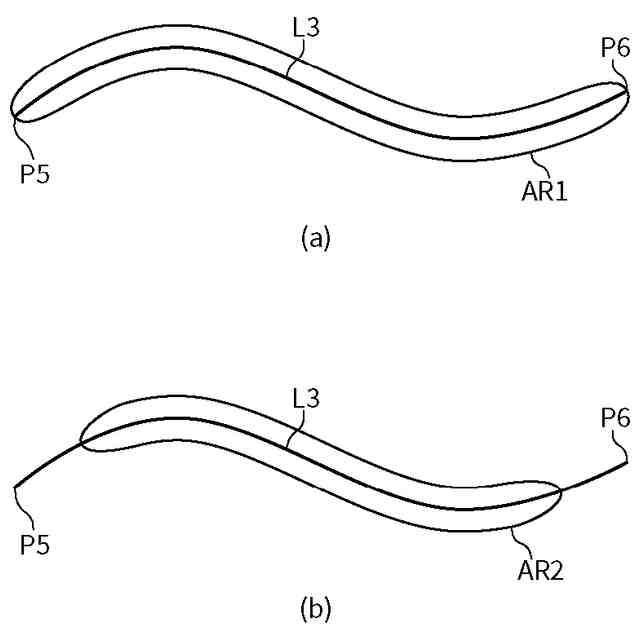
同実施の形態における溶接線と教示対象の領域とを示す図(図8(a)及び図8(b))
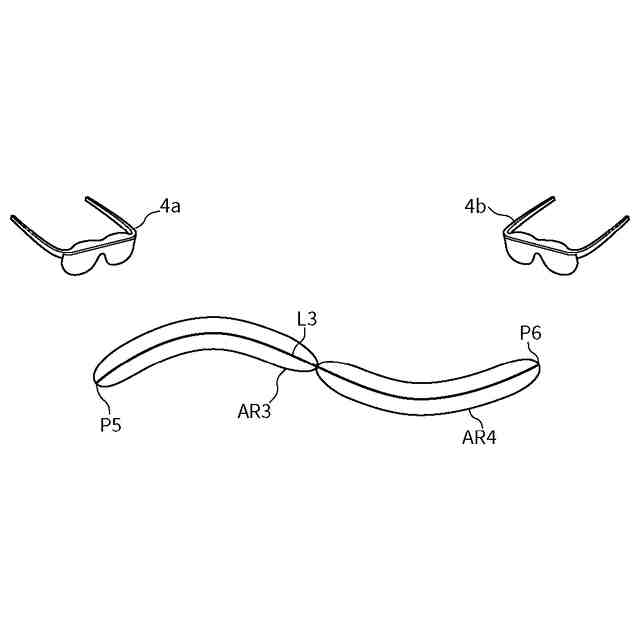
同実施の形態における溶接線と表示装置ごとの教示対象の領域とを示す図
【発明を実施するための形態】
【0009】
以下、本発明による教示データ蓄積装置について、実施の形態を用いて説明する。なお、以下の実施の形態において、同じ符号を付した構成要素及びステップは同一または相当するものであり、再度の説明を省略することがある。本実施の形態による教示データ蓄積装置は、仮想ロボットの複数の3次元モデルを用いて行われた教示の結果である教示データを蓄積するものである。
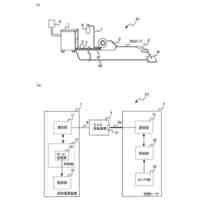
【0010】
図1は、本実施の形態による教示データ蓄積装置3を含む情報処理システム100の構成を示す模式図である。図1で示されるように、情報処理システム100は、ロボット1と、ロボット制御装置2と、教示データ蓄積装置3と、第1の表示装置4a及び第2の表示装置4bとを備える。なお、各装置間は、例えば、有線または無線で接続されてもよい。また、本実施の形態では、図1で示されるように実ロボットであるロボット1が実環境に存在する場合について主に説明するが、そうでなくてもよい。例えば、実環境にロボット1が存在していなくてもよい。この場合には、情報処理システム100は、例えば、ロボット1やロボット制御装置2を備えていなくてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
電圧調整装置
1日前
株式会社ダイヘン
異常検出装置
15日前
株式会社ダイヘン
電圧調整装置
21日前
株式会社ダイヘン
電圧調整装置
28日前
株式会社ダイヘン
電力変換装置
2日前
株式会社ダイヘン
熱加工システム
8日前
株式会社ダイヘン
教示データ蓄積装置
8日前
株式会社ダイヘン
判定方法及び電圧調整装置
25日前
株式会社ダイヘン
2重シールドティグ溶接方法
9日前
株式会社ダイヘン
2重シールドティグ溶接方法
9日前
株式会社ダイヘン
2重シールドティグ溶接方法
17日前
株式会社ダイヘン
2重シールドティグ溶接方法
1日前
株式会社ダイヘン
2重シールドティグ溶接方法
22日前
株式会社ダイヘン
2重シールドティグ溶接方法
9日前
株式会社ダイヘン
パルスアーク溶接の極性制御方法
1日前
株式会社ダイヘン
充電完了判定装置、および、充電システム
17日前
株式会社ダイヘン
プログラム、情報処理方法、及び情報処理装置
4日前
個人
釘抜き機
7か月前
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
4か月前
株式会社ツノダ
挟持工具
3か月前
UTM株式会社
搬送装置
7か月前
株式会社右川ゴム製造所
把持装置
2か月前
日東工器株式会社
衝撃工具
1日前
川崎重工業株式会社
ハンド
4か月前
個人
ロボットシステム
6か月前
株式会社マキタ
動力工具
1か月前
株式会社不二越
ロボット
6か月前
トヨタ自動車株式会社
関節機構
6か月前
トヨタ自動車株式会社
関節機構
7か月前
学校法人立命館
グリッパ
3か月前
学校法人立命館
ロボットハンド
3か月前
川崎重工業株式会社
罫書用治具
18日前
個人
プーリーキー抜き治具
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ