TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024079478
公報種別
公開特許公報(A)
公開日
2024-06-11
出願番号
2022192452
出願日
2022-11-30
発明の名称
締結工具
出願人
工機ホールディングス株式会社
代理人
個人
,
個人
主分類
B25B
23/14 20060101AFI20240604BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】締付トルクの安定化が可能な締結工具を提供する。
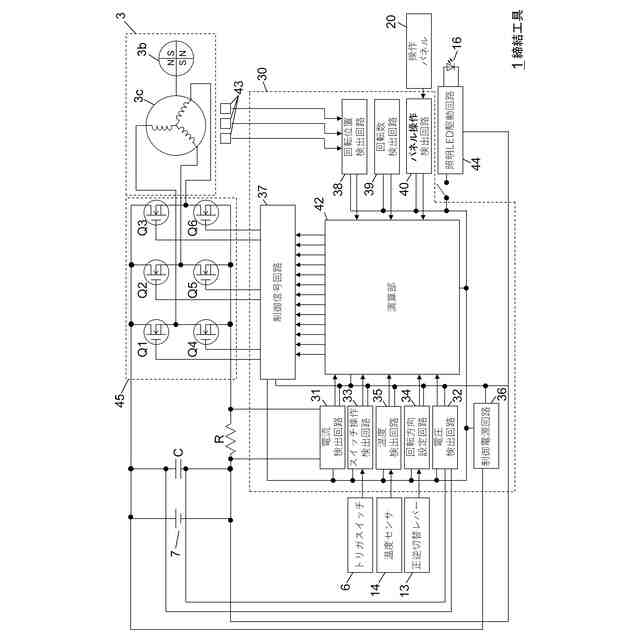
【解決手段】演算部42は、モータ3にかかる負荷とモータ3の駆動時間との組合せに関する互いに異なる第1条件または第2条件が満たされた場合に、トリガスイッチ6にモータ駆動操作が行われていてもモータ3を減速または停止させる。第1条件を満たしてモータ3が減速または停止した場合の締付トルクが、第2条件を満たしてモータ3が減速または停止した場合の締付トルクとほぼ同じとなるように、第1条件及び第2条件が設定される。第1条件及び第2条件は、締付トルクを目標値にするための条件であり、過電流保護条件とは異なる条件である。
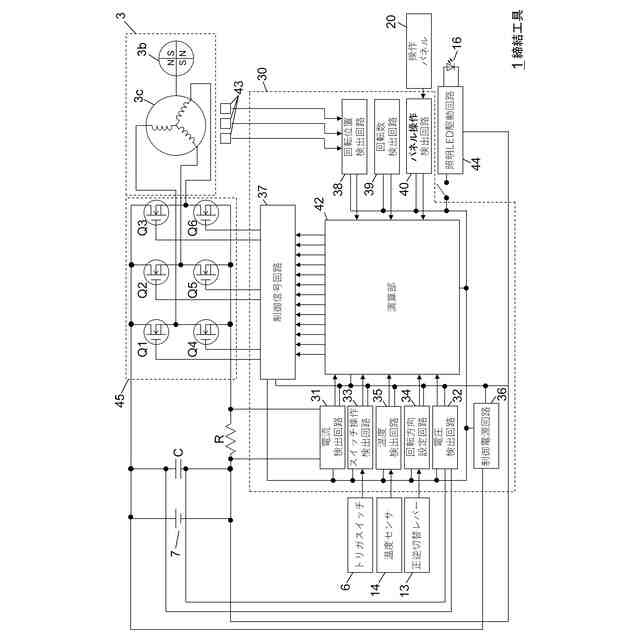
【選択図】図2
特許請求の範囲
【請求項1】
モータと、
前記モータの駆動、停止を指示する操作部と、
前記モータにより駆動され、先端工具を保持する先端工具装着部と、
前記モータを制御する制御部と、を有し、
前記制御部は、
前記操作部にモータ駆動操作が行われると前記モータを駆動し、
前記モータにかかる負荷と前記モータの駆動時間との組合せに関する互いに異なる第1条件または第2条件が満たされた場合に、前記操作部に前記モータ駆動操作が行われていても前記モータを減速または停止させる第1モードを有し、
前記第1条件を満たして前記モータが減速または停止した場合の締付トルクが、前記第2条件を満たして前記モータが減速または停止した場合の締付トルクとほぼ同じとなるように、前記第1条件及び前記第2条件が設定されている、
ことを特徴とする締結工具。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載の締結工具であって、
前記モータに流れる電流を検出する電流検出部を有し、
前記制御部は、前記電流検出部が検出した前記電流により前記負荷を推定する、
ことを特徴とする締結工具。
【請求項3】
請求項2に記載の締結工具であって、
前記制御部は、前記モータに流れる電流とその継続時間の組合せが過電流保護条件を満たすと、前記操作部に前記モータ駆動操作が行われていても前記モータを減速または停止させるよう構成され、
前記第1条件及び前記第2条件はいずれも、前記過電流保護条件とは異なる条件である、
ことを特徴とする締結工具。
【請求項4】
請求項1から3のいずれか一項に記載の締結工具であって、
前記第1条件は、前記負荷が第1閾値を超えたことを検出した後に前記モータの駆動を第1時間継続することであり、
前記第2条件は、前記負荷が前記第1閾値より大きい第2閾値を超えたことを検出した後に前記モータの駆動を前記第1時間より短い第2時間継続することである、
ことを特徴とする締結工具。
【請求項5】
請求項1から3のいずれか一項に記載の締結工具であって、
目標トルクを入力する入力部を有し、
前記制御部は、入力された目標トルクに応じて前記第1条件および前記第2条件を変更する、
ことを特徴とする締結工具。
【請求項6】
請求項4に記載の締結工具であって、
締結部材の被締結材に対する傾きの公差を入力する入力部を有し、
前記制御部は、入力された前記公差に応じて前記第1条件を変更する、
ことを特徴とする締結工具。
【請求項7】
請求項4に記載の締結工具であって、
締結部材が被締結材に対して傾斜している場合は前記第1条件を満たして前記モータが減速または停止し、締結部材が被締結材に対して垂直な場合は前記第2条件を満たして前記モータが減速または停止する、
ことを特徴とする締結工具。
【請求項8】
請求項1から3のいずれか一項に記載の締結工具であって、
前記締結部材がアンカーボルトである、
ことを特徴とする締結工具。
【請求項9】
請求項1から3のいずれか一項に記載の締結工具であって、
前記制御部は、前記第1条件又は前記第2条件が満たされても前記モータを停止および減速させない第2モードを有する、
ことを特徴とする締結工具。
【請求項10】
請求項1から3のいずれか一項に記載の締結工具であって、
前記モータの駆動力により前記先端工具を回転打撃する回転打撃機構を有する、
ことを特徴とする締結工具。
発明の詳細な説明
【技術分野】
【0001】
本発明は、締結工具に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
下記特許文献1は、モータの駆動電流や回転数に基づいて締付トルクを算出し、所定の締付トルクに達したと判断した場合にモータを停止させる締結工具を開示する。
【先行技術文献】
【特許文献】
【0003】
特開2009-202317号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えばコンクリートに被締結材を固定する場合、コンクリートに下穴を開けてアンカーボルトを設置しておき、アンカーボルトにナットを締め付ける。アンカーボルトは所定の傾斜公差内で設置すればよいため、傾斜状態で設置されるアンカーボルトが存在する。本発明者は、傾斜状態で設置されたアンカーボルトに対して締付け作業を行う場合、締付けトルクが安定しないことを発見した。
【0005】
本発明の目的は、締付トルクの安定化が可能な締結工具を提供することである。
【課題を解決するための手段】
【0006】
本発明のある態様は、締結工具である。この締結工具は、
モータと、
前記モータの駆動、停止を指示する操作部と、
前記モータにより駆動され、先端工具を保持する先端工具装着部と、
前記モータを制御する制御部と、を有し、
前記制御部は、
前記操作部にモータ駆動操作が行われると前記モータを駆動し、
前記モータにかかる負荷と前記モータの駆動時間との組合せに関する互いに異なる第1条件または第2条件が満たされた場合に、前記操作部に前記モータ駆動操作が行われていても前記モータを減速または停止させる第1モードを有し、
前記第1条件を満たして前記モータが減速または停止した場合の締付トルクが、前記第2条件を満たして前記モータが減速または停止した場合の締付トルクとほぼ同じとなるように、前記第1条件及び前記第2条件が設定されている。
【0007】
本発明は「作業機」や「電動工具」、「電気機器」等と表現されてもよく、そのように表現されたものも本発明の態様として有効である。
【発明の効果】
【0008】
本発明によれば、締付トルクの安定化が可能な締結工具を提供することができる。
【図面の簡単な説明】
【0009】
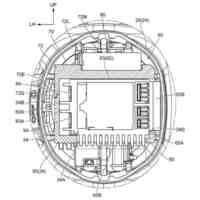
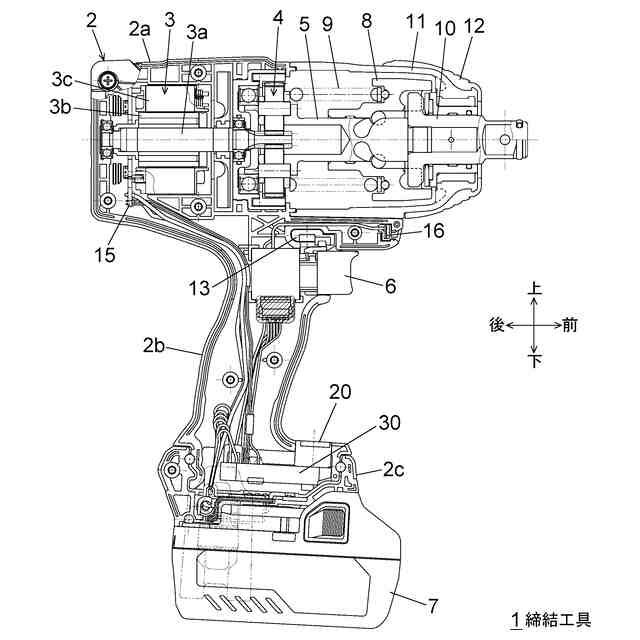
本発明の実施の形態に係る締結工具1の側断面図。
締結工具1の回路ブロック図。
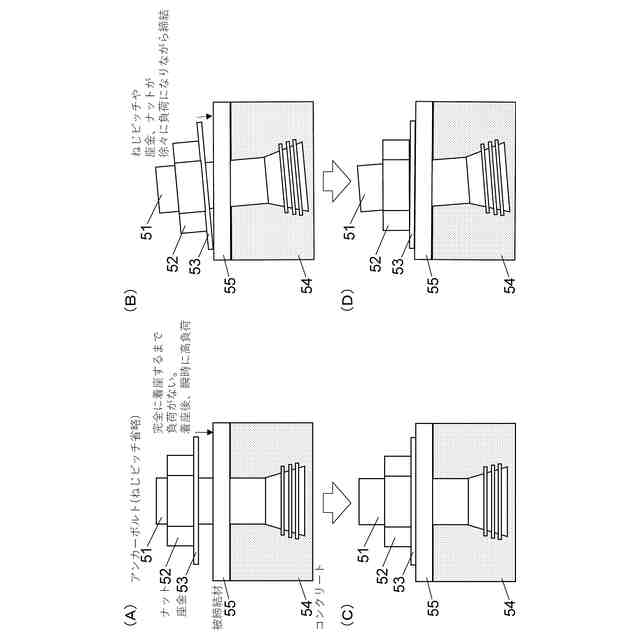
(A)は、被締結材55に対して垂直なアンカーボルト51にナット52を締め付けていく途中の状態の断面図。(B)は、被締結材55に対して傾斜したアンカーボルト51にナット52を締め付けていく途中の状態の断面図。(C)は、図3(A)の状態からナット52の締付が進んだ着座状態の断面図。(D)は、図3(B)の状態からナット52の締付が進んだ着座状態の断面図。
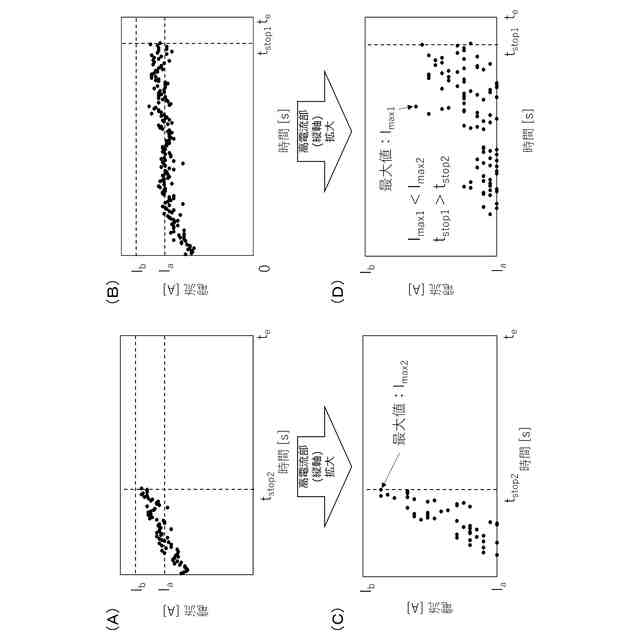
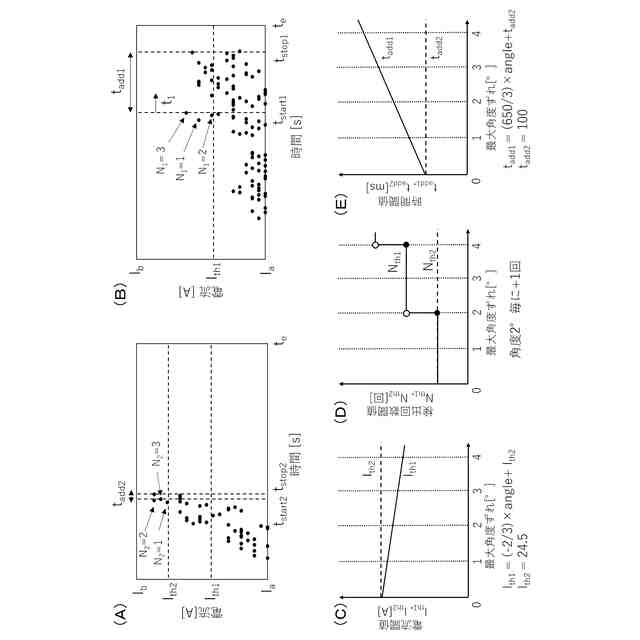
(A)は、被締結材55に対して垂直なアンカーボルト51にナット52を締め付けた場合のモータ3に流れる電流の時間変化を示す図。(B)は、被締結材55に対して傾斜したアンカーボルト51にナット52を締め付けた場合のモータ3に流れる電流の時間変化を示す図。(C)は、図4(A)の縦軸をI
a
~I
b
の範囲に限定した拡大図。(D)は、図4(B)の縦軸をI
a
~I
b
の範囲に限定した拡大図。
(A)は、図4(C)に第1電流閾値I
th1
、第2電流閾値I
th2
、第2増締め開始時刻t
start2
、第2増締め時間t
add2
の記載を追加した図。(B)は、図4(D)に第1電流閾値I
th1
、第1増締め開始時刻t
start1
、第1増締め時間t
add1
の記載を追加した図。(C)は、アンカーボルト51の最大角度ずれの設定値と第1電流閾値I
th1
及び第2電流閾値I
th2
との関係を示すグラフ。(D)は、アンカーボルト51の最大角度ずれの設定値と第1回数閾値N
th1
及び第2回数閾値N
th2
の関係を示すグラフ。(E)は、アンカーボルト51の最大角度ずれの設定値と第1増締め時間t
add1
及び第2増締め時間t
add2
との関係を示すグラフ。
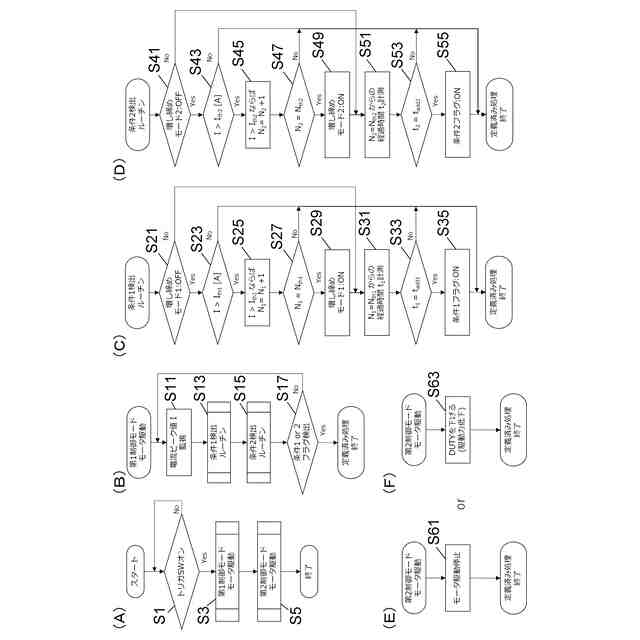
(A)~(F)締付作業用オートストップモードにおける締結工具1の制御フローチャート。
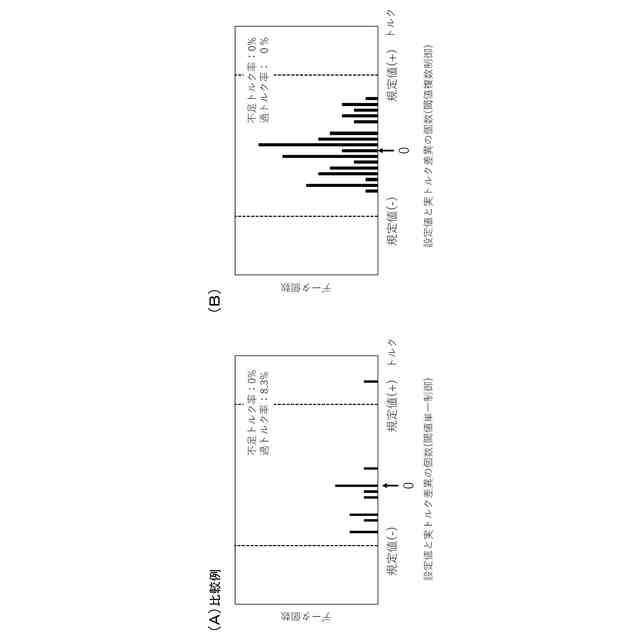
(A)は、図6(A)~(F)に示す制御のうち条件1検出ルーチン(S13)を行わない比較例の制御で多数回の締付作業を行って実際のトルクのデータを取った場合における、実際のトルクと当該トルクに該当するデータの個数との関係を示すグラフ。(B)は、図6(A)~(F)に示す制御に示す制御で多数回の締付作業を行って実際のトルクのデータを取った場合における、実際のトルクと当該トルクに該当するデータの個数との関係を示すグラフ。
【発明を実施するための形態】
【0010】
図1は、本発明の実施の形態に係る締結工具1の側断面図である。図1により、締結工具1における互いに直交する前後、上下方向を定義する。前後方向は、締結工具1のモータ軸3aと平行な方向である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
4か月前
株式会社ツノダ
挟持工具
3か月前
日東工器株式会社
衝撃工具
8日前
川崎重工業株式会社
ハンド
4か月前
株式会社右川ゴム製造所
把持装置
3か月前
個人
ロボットシステム
6か月前
川崎重工業株式会社
罫書用治具
25日前
学校法人立命館
ロボットハンド
4か月前
トヨタ自動車株式会社
関節機構
6か月前
学校法人立命館
グリッパ
3か月前
株式会社マキタ
動力工具
1か月前
株式会社不二越
ロボット
6か月前
個人
プーリーキー抜き治具
3か月前
トヨタ自動車株式会社
ハンド構造
15日前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
宮川工機株式会社
板状部品移動装置
1か月前
東京都公立大学法人
ロボットハンド
1か月前
CKD株式会社
電動把持装置
2か月前
株式会社不二越
予測システム
4か月前
国立大学法人山形大学
二重関節機構
1か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社越智工業所
ブレーカ用カバー
6か月前
個人
スロープバリビス-ビス&-ドライバー
1か月前
工機ホールディングス株式会社
作業機
24日前
工機ホールディングス株式会社
作業機
24日前
工機ホールディングス株式会社
作業機
24日前
工機ホールディングス株式会社
作業機
4か月前
株式会社ダイヘン
画像生成装置
3か月前
株式会社中村製作所
トルクドライバー
4か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
4か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ