TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024071882
公報種別
公開特許公報(A)
公開日
2024-05-27
出願番号
2022182370
出願日
2022-11-15
発明の名称
羽ばたき装置
出願人
株式会社中北製作所
代理人
個人
主分類
B64U
10/40 20230101AFI20240520BHJP(航空機;飛行;宇宙工学)
要約
【課題】小型で高機動力の飛行が可能な羽ばたき飛行ロボットを提供すること。
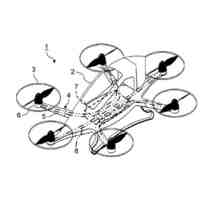
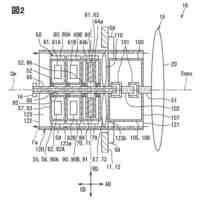
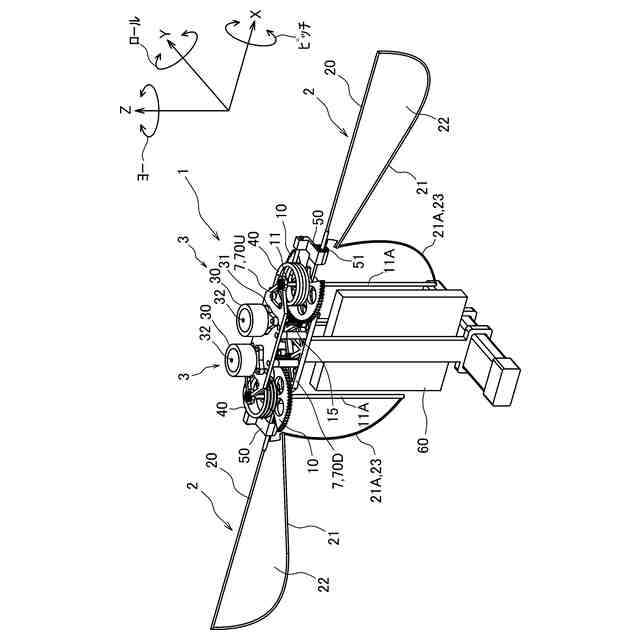
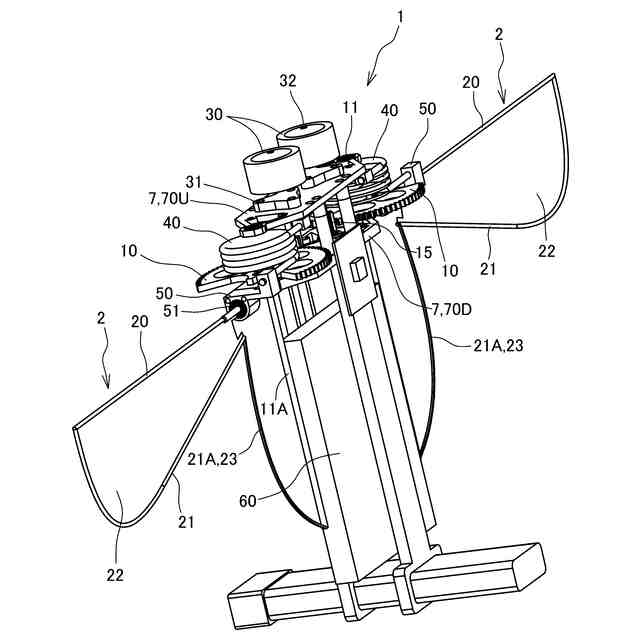
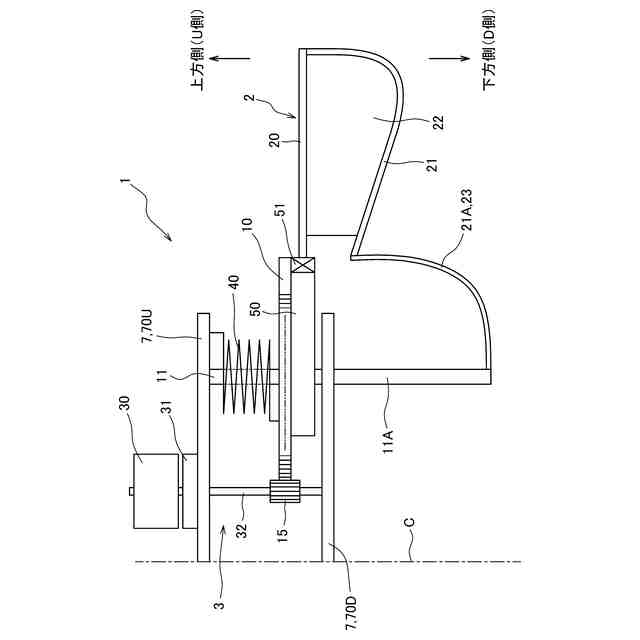
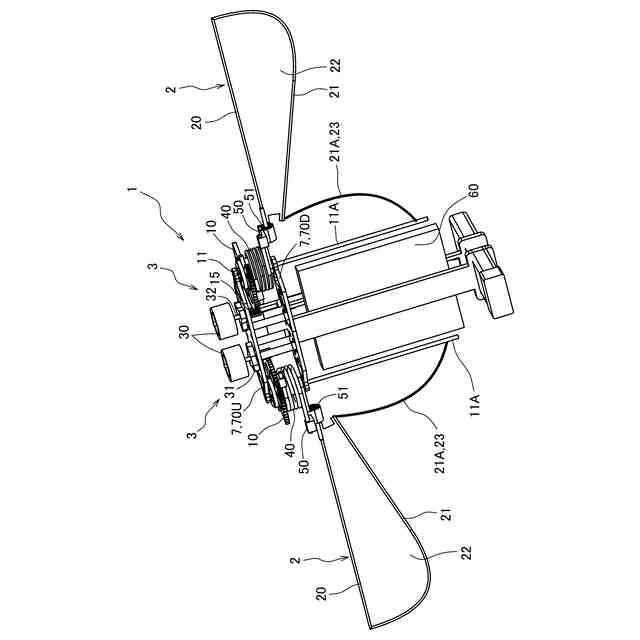
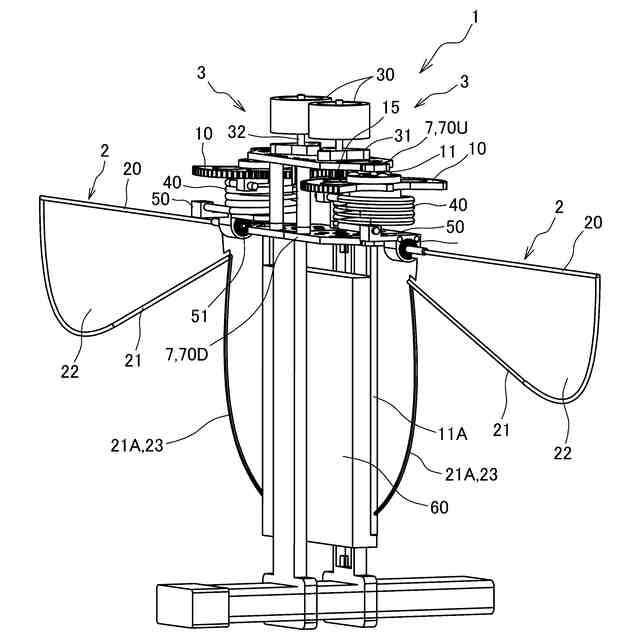
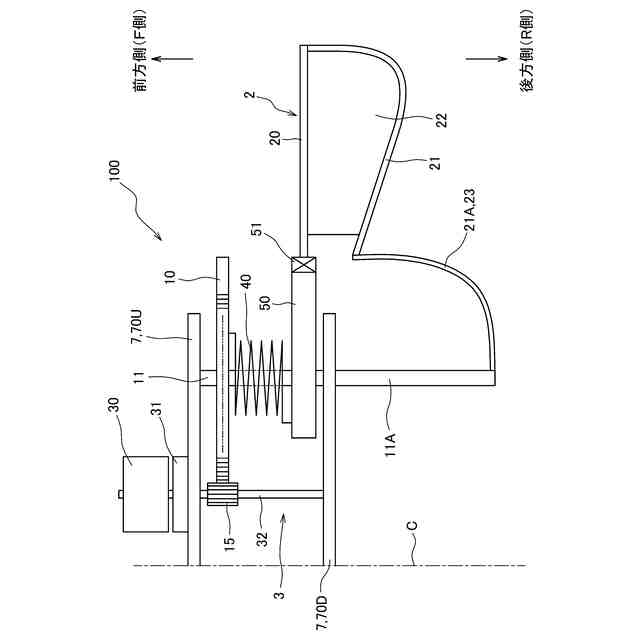
【解決手段】羽ばたき装置1は、羽根2,2と、羽根2,2のそれぞれに対応して設けられた駆動部3とを有し、駆動部3は、駆動源30と、駆動源30により第1回動軸線周りに回動する従動部10と、従動部10の回動方向とは逆に従動部10を付勢する第1付勢部材40と、制御部60とを備える。羽根2は、所定の軸線方向に延びると共に、一端側において従動部10に対して接続され、第1回動軸線に対して交差する第2回動軸線周り方向に回動可能に接続された第1羽根軸20と、第1羽根軸20に対して交差する方向に延びると共に、一端側において従動部10に対して直接的又は間接的に接続され、第1回動軸線周り方向に回動可能に接続された第2羽根軸21と、第1羽根軸20及び第2羽根軸21に亘って設けられた羽根本体22と、を有するものであることを特徴とする。
【選択図】図1
特許請求の範囲
【請求項1】
一対の羽根と、
一対の前記羽根のそれぞれに対応して設けられた駆動部と、
を有し、
前記駆動部は、
駆動源と、
前記駆動源から出力された動力を受けて第1回動軸線周りに回動する従動部と、
前記従動部の回動に伴って、前記従動部の回動方向とは逆方向への付勢力を前記従動部に対して付与する第1付勢部材と、
前記駆動源による駆動力の出力制御を行う制御部と、
を備えたものであり、
前記羽根は、
所定の軸線方向に延びると共に、一端側において前記従動部に対して接続され、前記第1回動軸線に対して交差する第2回動軸線周り方向に回動可能に接続された第1羽根軸と、
前記第1羽根軸に対して交差する方向に延びると共に、一端側において前記従動部に対して直接的又は間接的に接続され、前記第1回動軸線周り方向に回動可能に接続された第2羽根軸と、
前記第1羽根軸及び前記第2羽根軸に亘って設けられた羽根本体と、
を有するものであること、
を特徴とする羽ばたき装置。
続きを表示(約 1,800 文字)
【請求項2】
一対の羽根と、
一対の前記羽根のそれぞれに対応して設けられた駆動部と、
を有し、
前記駆動部は、
駆動源と、
前記駆動源から出力された動力を受けて第1回動軸線周りに回動する従動部と、
前記従動部の回動に伴って、前記従動部の回動方向とは逆方向への付勢力を前記従動部に対して付与する第1付勢部材と、
前記駆動源による駆動力の出力制御を行う制御部と、
を備えたものであり、
前記羽根は、
所定の軸線方向に延びると共に、一端側において前記従動部に対して接続され、前記第1回動軸線に対して交差する第2回動軸線周り方向に回動可能に接続された第1羽根軸と、
前記第1羽根軸に対して交差する方向に延びると共に、一端側において前記従動部に対して直接的又は間接的に接続され、前記第1回動軸線周り方向に回動可能に接続された第2羽根軸と、
前記第1羽根軸及び前記第2羽根軸に亘って設けられた羽根本体と、
を有するものであり、
前記第1付勢部材は、
一端側において前記従動部に対して接続され、他端側において前記第1羽根軸に対して直接的又は間接的に接続されていること、
を特徴とする羽ばたき装置。
【請求項3】
前記駆動源が、DCモータにおけるアウトランナーモータで構成されていること、を特徴とする請求項1又は2に記載の羽ばたき装置。
【請求項4】
前記制御部は、
前記駆動源の正転又は逆転の切り替えにおいて前記駆動源の回転数がゼロとなる所定時間前に前記駆動源の駆動力の出力を停止させる制御を行うと共に、前記第1付勢部材の復元力により、前記羽根における往動又は復動が切り替わった所定時間より後に、前記駆動源による駆動力の出力を再開させる制御を行うこと、を特徴とする請求項1又は2に記載の羽ばたき装置。
【請求項5】
前記制御部は、
前記第1付勢部材の振幅中心を、前記第1回動軸線周りの一方側又は他方側に所定量でオフセットするオフセット制御を実行可能であり、
前記オフセット制御は、前記駆動源における駆動電圧波形に所定量のオフセットを付与することで実行されること、を特徴とする請求項1又は2に記載の羽ばたき装置。
【請求項6】
前記羽根が、当該羽根の運動と周囲流体との相対速度差により生じる風圧による抵抗力を受けることにより、進行方向に向く羽根面の法線ベクトルの鉛直成分が下向きとなるように所定の角度での傾斜を維持するための回転リミッターを有すること、を特徴とする請求項1又は2に記載の羽ばたき装置。
【請求項7】
前記駆動部を支持する躯体と、
前記従動部の回動に伴って、前記従動部の回動方向とは逆方向への付勢力を前記従動部に対して付与する第2付勢部材と、
を有しており、
前記第2付勢部材は、
一端側において前記躯体に対して接続されると共に、他端側において、前記第1羽根軸に直接的又は間接的に接続されており、
前記第2付勢部材は、前記第1付勢部材における付勢力よりも小さい付勢力を発揮可能、かつ、前記第1付勢部材における振幅中心を基準位置に戻すことが可能な付勢力を発揮可能に形成されていること、を特徴とする請求項2に記載の羽ばたき装置。
【請求項8】
前記駆動部を支持する躯体を有しており、
前記躯体は、間隔を空けて配された一対の支持部を有しており、
前記駆動源が、前記一対の支持部の外側に配されており、
前記第1付勢部材及び前記従動部が、前記一対の支持部の間に配されていること、を特徴とする請求項1又は2に記載の羽ばたき装置。
【請求項9】
前記第1回動軸線の一端側において前記第1回動軸線方向に延びるように延長部が形成されており、
前記第2羽根軸が、一端側において前記延長部に向けて延びるように形成された懸架部を有しており、
前記懸架部は、一端側において前記延長部に接続されると共に、前記延長部と一体的に前記第1回動軸線周り方向に回動が可能であること、
を特徴とする請求項1又は2に記載の羽ばたき装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、羽根を揺動させることによって浮上力を得る羽ばたき装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、上空からの監視、撮影、各種の点検等に羽ばたき装置が利用されている。上述した羽ばたき装置として、DCモータにより、直接的に羽ばたき翼(羽根に相当)を駆動する羽ばたき翼超小型飛行機システム(以下、単に羽ばたき装置と称する)が知られている(例えば、特許文献1)。
【0003】
ところで、近年、羽ばたき装置は、利用の多様化に伴い、玩具等にも利用されている。また、狭いスペースでの調査や補修、あるいは、撮影等においては、小型で多様な飛行態様での飛行が可能な羽ばたき装置が求められている。ここで、羽に及ぼされる浮上力は、羽の長さ×羽ばたき周波数に依存するため、小型の羽ばたき飛行ロボットが十分な浮上力を得るには羽ばたき周波数の向上が欠かせないものとされている。しかしながら上述した特許文献1の構成では、羽ばたき周波数は固有振動数(2*π*√(K/I))の近傍となる(但しKは当該トーションバネのバネ定数、Iはシステム全体の回転慣性)。このためIをなるべく小さくすることを重視して特許文献1においてはインランナー型ブラシレスDCモータやブラシ型DCモータが用いられている。一方でこれらのモータはパワーウェイトレシオが低く、また前者は高価であり、後者は寿命が短いという欠点がある。このため、Iが大きくなるため大きなK、すなわちより重いトーションバネとの組み合わせを求められるが、より低価格でパワーウェイトレシオの高いアウトランナー型のブラシレスDCモータを用いる構成の実現が、低コスト化には必須である。また、Iが大きい事は、空力負荷変動が羽ばたき運動に及ぼす影響が相対的に小さくなるため羽ばたき運動が安定し、これによる姿勢制御を安定的に行うことができるというメリットにもつながる。そこで、小型の羽ばたきロボットにアウトランナー型のブラシレスDCモータの利用が検討されている。
【先行技術文献】
【特許文献】
【0004】
米国特許出願公開第2016/159477号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、羽ばたき周波数を下げることなくアウトランナー型モータを利用する場合は、大きなモータイナーシャに伴いKが大きくなるため、バネも大型化し質量が増大する。したがって、アウトランナー型モータを利用する場合は、この大きなバネの復元力に抗わなければならないため、オフセット電圧を大きくする必要があった。そのため、オフセットを掛ける際に、より大きなモータパワーが必要となる懸念があった。このように、アウトランナー型モータの利用は、安価で構成でき、パワーウェイトレシオを高めることが可能であるもののオフセットを掛ける際にモータパワーが必要となる懸念がある。したがって、安価で、パワーウェイトレシオを高めることが可能で小型に構成できる羽ばたき装置が求められている。
【0006】
そこで、本発明は、低コストで構成でき、パワーウェイトレシオを高めることが可能で小型に構成可能な羽ばたき装置を提供することを目的とする。また、本発明は、玩具等にも利用可能な低コストで実現可能な羽ばたき装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)上述した課題を解決すべく提供される本発明の羽ばたき装置は、一対の羽根と、一対の前記羽根のそれぞれに対応して設けられた駆動部と、を有し、前記駆動部は、駆動源と、前記駆動源から出力された動力を受けて第1回動軸線周りに回動する従動部と、前記従動部の回動に伴って、前記従動部の回動方向とは逆方向への付勢力を前記従動部に対して付与する第1付勢部材と、前記駆動源による駆動力の出力制御を行う制御部と、を備えたものであり、前記羽根は、所定の軸線方向に延びると共に、一端側において前記従動部に対して接続され、前記第1回動軸線に対して交差する第2回動軸線周り方向に回動可能に接続された第1羽根軸と、前記第1羽根軸に対して交差する方向に延びると共に、一端側において前記従動部に対して直接的又は間接的に接続され、前記第1回動軸線周り方向に回動可能に接続された第2羽根軸と、前記第1羽根軸及び前記第2羽根軸に亘って設けられた羽根本体と、を有するものであること、を特徴とするものである。
【0008】
上述した羽ばたき装置は、第1付勢部材による付勢により、第1羽根軸を、第1回動軸線周り方向に励振することができる。したがって、上述した羽ばたき装置は、一対の羽根の羽ばたき周波数を励振により増幅できるので、一対の羽根を高速で駆動できる。そのため、強い浮上力を得ることができる。なお、上述した第1付勢部材には、例えば、トーションバネ等の捩り方向にトルクを付勢できるものが好ましく利用できる。
【0009】
また、上述した羽ばたき装置は、一対の駆動源をそれぞれ独立して駆動制御することができるので、様々な方向への飛行が可能となる。ここで、駆動源には、各種のモータ等が利用できるが、正逆回転が容易でありパワーウェイトレシオの高いブラシレスDCモータが好ましく利用できる。これにより、バッテリ駆動が容易になり、制御も容易に行うことができる。
【0010】
ここで、羽ばたき周波数を向上させるには、例えば、第1付勢部材に用いられるトーションバネ等のバネ定数を上げることが考えられる。しかしながら、第1付勢部材(例えば、トーションバネ)のバネ定数を上げた場合は、復元力も強くなるため、羽ばたき振幅中心をオフセットさせるのにより大きなモータパワーを必要とするという課題があった。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ドローン
1か月前
個人
ドローンシステム
3か月前
株式会社三圓
浮上装置
7か月前
個人
陸海空用の乗り物
16日前
個人
空港用貨物搬送車
11か月前
個人
垂直離着陸機用エンジン改
3か月前
個人
飛行艇
9か月前
個人
ドローンの計測操作方法2
7か月前
個人
ドローンの計測操作方法3
7か月前
キヤノン電子株式会社
磁気トルカ
8か月前
個人
ドローンを自動離着陸する方法
3か月前
個人
ドローン消音装置
6か月前
個人
空中移動システム
4か月前
個人
エアライナー全自動パラシュート
1か月前
トヨタ自動車株式会社
ドローン
1か月前
株式会社ACSL
システム
2か月前
株式会社セネック
ドローンポート
11か月前
株式会社セネック
ドローンポート
11か月前
合同会社アドエア
パラシュート射出装置
1か月前
株式会社SUBARU
電動航空機
11か月前
株式会社ACSL
システム
2か月前
株式会社中北製作所
羽ばたき装置
11か月前
合同会社アドエア
飛行体の落下補助装置
4か月前
個人
垂直離着陸機用ガスタービンエンジン
3か月前
株式会社SUBARU
回転翼航空機
11か月前
全日本空輸株式会社
ドーリシステム
6か月前
株式会社SUBARU
移動体
4か月前
HDサービス合同会社
カメラ装着装置
6か月前
ミネベアミツミ株式会社
無人機
1か月前
ミネベアミツミ株式会社
無人機
1か月前
株式会社デンソー
推進装置
9か月前
株式会社SUBARU
構造体の製造方法
8か月前
本田技研工業株式会社
航空機
6か月前
株式会社日立製作所
推進装置
5か月前
本田技研工業株式会社
移動体
8か月前
本田技研工業株式会社
移動体
8か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ