TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024068590
公報種別
公開特許公報(A)
公開日
2024-05-20
出願番号
2022179159
出願日
2022-11-08
発明の名称
回転翼航空機
出願人
株式会社SUBARU
代理人
個人
主分類
B64C
27/08 20230101AFI20240513BHJP(航空機;飛行;宇宙工学)
要約
【課題】マルチコプタ、ドローン或いは空飛ぶクルマ等の回転翼航空機を小型軽量化することである。
【解決手段】胴体に複数のロータを設けた回転翼航空機において、前記複数のロータの下方にコアンダ効果を引き起こす円形翼であって、上面が上方に向かって凸形状となるように湾曲している環状の曲面を有する前記円形翼をそれぞれ配置し、前記複数のロータの回転による前記第1の揚力、複数の前記円形翼のコアンダ効果による前記第2の揚力及び複数の前記円形翼の上面に沿って空気の噴流がそれぞれ下向きに偏向されることによる第3の揚力を発生させるようにした。
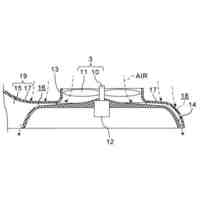
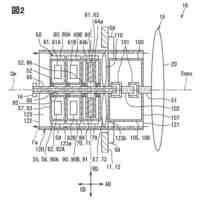
【選択図】 図2
特許請求の範囲
【請求項1】
胴体に複数のロータを設けた回転翼航空機において、
前記複数のロータの下方にコアンダ効果を引き起こす円形翼であって、上面が上方に向かって凸形状となるように湾曲している環状の曲面を有する前記円形翼をそれぞれ配置し、
前記複数のロータの回転による前記第1の揚力、複数の前記円形翼のコアンダ効果による前記第2の揚力及び複数の前記円形翼の上面に沿って空気の噴流がそれぞれ下向きに偏向されることによる第3の揚力を発生させるようにした回転翼航空機。
続きを表示(約 400 文字)
【請求項2】
前記複数の円形翼の前記上面の少なくとも一部であって前記環状の曲面を含む前記少なくとも一部を、それぞれ前記上面との間に空気の流路が形成されるように隙間を空けてカウルで覆い、前記カウルに空気を前記流路に引き込むための吸気口を形成した請求項1記載の回転翼航空機。
【請求項3】
前記複数の円形翼の前記上面からそれぞれ前記流路に突出する舵面を設けた請求項2記載の回転翼航空機。
【請求項4】
前記複数の円形翼の少なくとも2つの下方にそれぞれ車輪及びバッテリの少なくとも一方を配置した請求項1記載の回転翼航空機。
【請求項5】
前記複数の円形翼の少なくとも2つの下方にそれぞれ車輪及びバッテリを配置することによって前記回転翼航空機の重心を前記各ロータよりも下方にし、かつ前記車輪よりも前記胴体側に前記バッテリを配置した請求項1記載の回転翼航空機。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、回転翼航空機に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
回転翼航空機の一種としてマルチコプタが知られている(例えば特許文献1、特許文献2、特許文献3及び特許文献4参照)。メインロータとテールロータを有するヘリコプタに対して、マルチコプタは3つ以上のロータを有する回転翼航空機であり、4つのロータを有するクワッドコプタや6つのロータを有するヘキサコプタが代表的である。ヘリコプタやマルチコプタ等の無人航空機(UAV:Unmanned aerial vehicle)はドローンと呼ばれるのに対して、マルチコプタからなる有人航空機は空飛ぶクルマとも呼ばれる。
【0003】
マルチコプタは、垂直方向に離着陸できるため垂直離着陸機(VTOL:Vertical Take-Off and Landing aircraft)に分類される。典型的なマルチコプタは、各ロータが電動モータで回転する電動式の回転翼航空機であるため、電動のVTOLを意味するeVTOLとも呼ばれる。
【先行技術文献】
【特許文献】
【0004】
特開2018-008563号公報
特開2020-111124号公報
特開2020-138713号公報
国際公開第2021/095395号
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、マルチコプタ、ドローン或いは空飛ぶクルマ等の回転翼航空機を小型軽量化することを目的とする。
【課題を解決するための手段】
【0006】
本発明の実施形態に係る回転翼航空機は、胴体に複数のロータを設けた回転翼航空機において、前記複数のロータの下方にコアンダ効果を引き起こす円形翼であって、上面が上方に向かって凸形状となるように湾曲している環状の曲面を有する前記円形翼をそれぞれ配置し、前記複数のロータの回転による前記第1の揚力、複数の前記円形翼のコアンダ効果による前記第2の揚力及び複数の前記円形翼の上面に沿って空気の噴流がそれぞれ下向きに偏向されることによる第3の揚力を発生させるようにしたものである。
【図面の簡単な説明】
【0007】
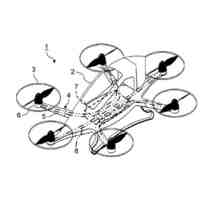
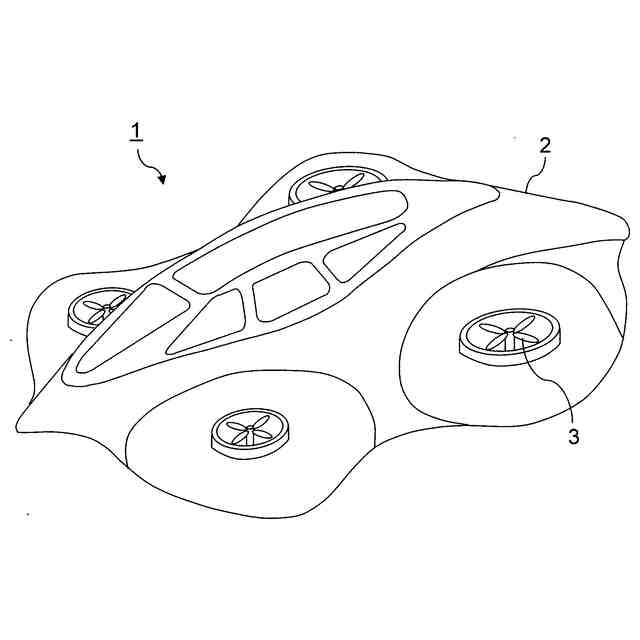
本発明の第1の実施形態に係る回転翼航空機の概略構成例を示す斜視図。
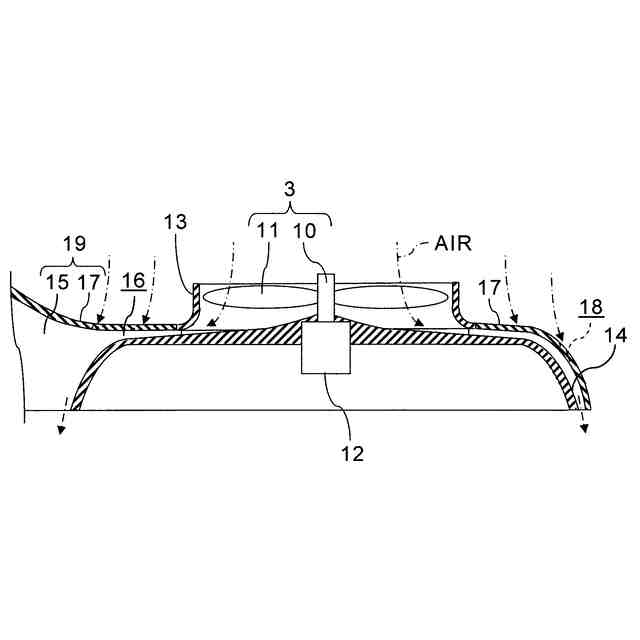
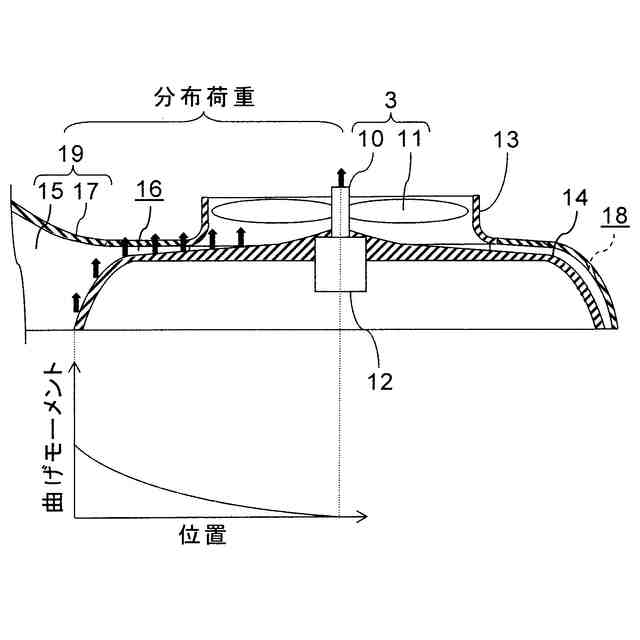
図1に示す回転翼航空機のロータを含む部分における詳細構成例を示す縦断面図。
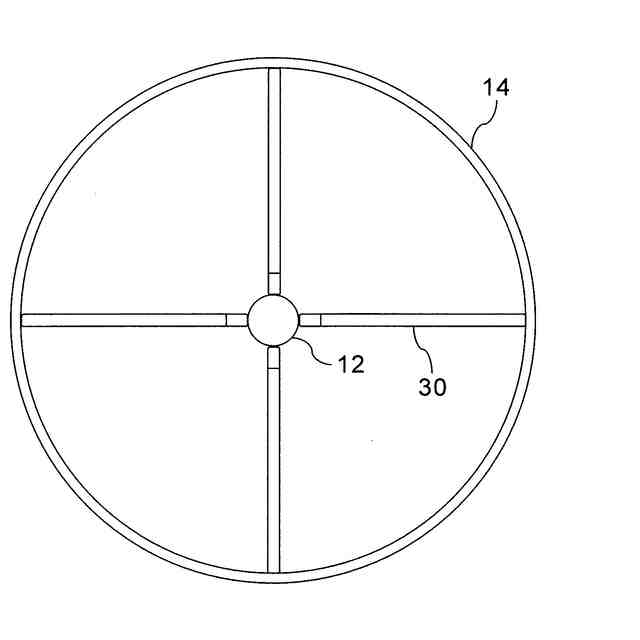
図2に示すロータを含む部分の上面図。
ロータのみで揚力を発生させる従来の回転翼航空機における問題を説明する図。
図2に示すようにロータと円形翼の双方で揚力を発生させる回転翼航空機の効果を説明する図。
本発明の第2の実施形態に係る回転翼航空機が有する円形翼の構成を示す縦断面図。
図6に示す円形翼の下面図。
本発明の第3の実施形態に係る回転翼航空機が有する円形翼の構成を示す縦断面図。
図8に示す円形翼の上面図。
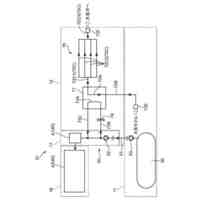
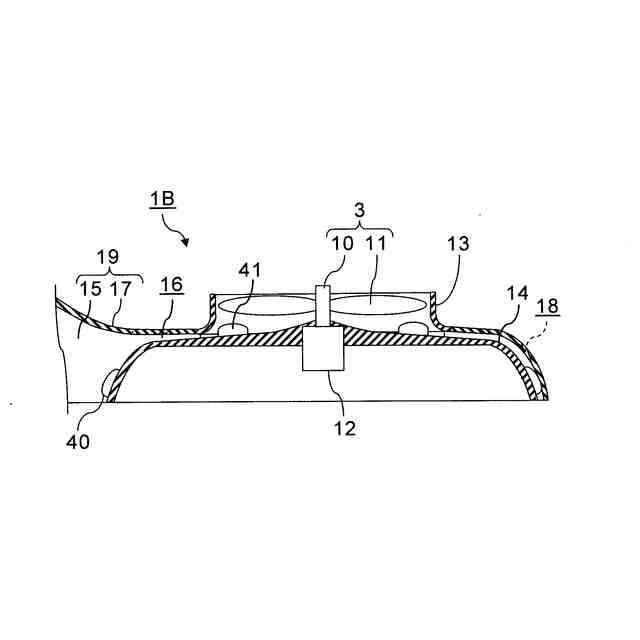
本発明の第4の実施形態に係る回転翼航空機の構成例を示す部分断面図。
ロータを機体上方に配置した従来の回転翼航空機における問題点を説明する図。
ロータを機体下方に配置した従来の回転翼航空機における問題点を説明する図。
図10に示す回転翼航空機の効果を説明する図。
【発明を実施するための形態】
【0008】
本発明の実施形態に係る回転翼航空機について添付図面を参照して説明する。
【0009】
(第1の実施形態)
図1は本発明の第1の実施形態に係る回転翼航空機1の概略構成例を示す斜視図である。
【0010】
回転翼航空機1は、胴体2に複数のロータ3を設けて構成される。ロータ3は、ファン又はプロペラと呼ばれる場合もある。図1は、回転翼航空機1が4つのロータ3を有するマルチコプタである場合の例を示しているがロータ3の数は任意である。回転翼航空機1は、ドローンとも呼ばれるUAV、空飛ぶクルマとも呼ばれる有人航空機及びOPV(Optionally Piloted Vehicle)のいずれであっても良い。OPVはパイロットが搭乗して操縦することも可能な無人航空機であり、有人航空機と無人航空機のハイブリッド航空機である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ドローン
2か月前
個人
ドローンシステム
3か月前
個人
連続回転可能な飛行機翼
2日前
個人
陸海空用の乗り物
27日前
株式会社三圓
浮上装置
8か月前
個人
空港用貨物搬送車
11か月前
個人
垂直離着陸機用エンジン改
3か月前
個人
ドローンの計測操作方法2
8か月前
個人
ドローンの計測操作方法3
8か月前
個人
飛行艇
10か月前
キヤノン電子株式会社
磁気トルカ
9か月前
個人
ドローン消音装置
6か月前
個人
ドローンを自動離着陸する方法
3か月前
個人
空中移動システム
5か月前
個人
エアライナー全自動パラシュート
2か月前
トヨタ自動車株式会社
ドローン
1か月前
株式会社セネック
ドローンポート
11か月前
株式会社セネック
ドローンポート
11か月前
株式会社ACSL
システム
2か月前
株式会社ACSL
システム
2か月前
合同会社アドエア
パラシュート射出装置
2か月前
株式会社SUBARU
電動航空機
12か月前
合同会社アドエア
飛行体の落下補助装置
4か月前
株式会社中北製作所
羽ばたき装置
11か月前
株式会社小糸製作所
飛行体ポート
3日前
個人
垂直離着陸機用ガスタービンエンジン
3か月前
株式会社SUBARU
移動体
5か月前
全日本空輸株式会社
ドーリシステム
7か月前
株式会社SUBARU
回転翼航空機
12か月前
ミネベアミツミ株式会社
無人機
1か月前
ミネベアミツミ株式会社
無人機
1か月前
HDサービス合同会社
カメラ装着装置
6か月前
川崎重工業株式会社
水素航空機
2日前
株式会社デンソー
推進装置
9か月前
本田技研工業株式会社
航空機
7か月前
本田技研工業株式会社
航空機
7か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ